ABB机器人C#上位机开发:解锁操作与数据交互的奥秘
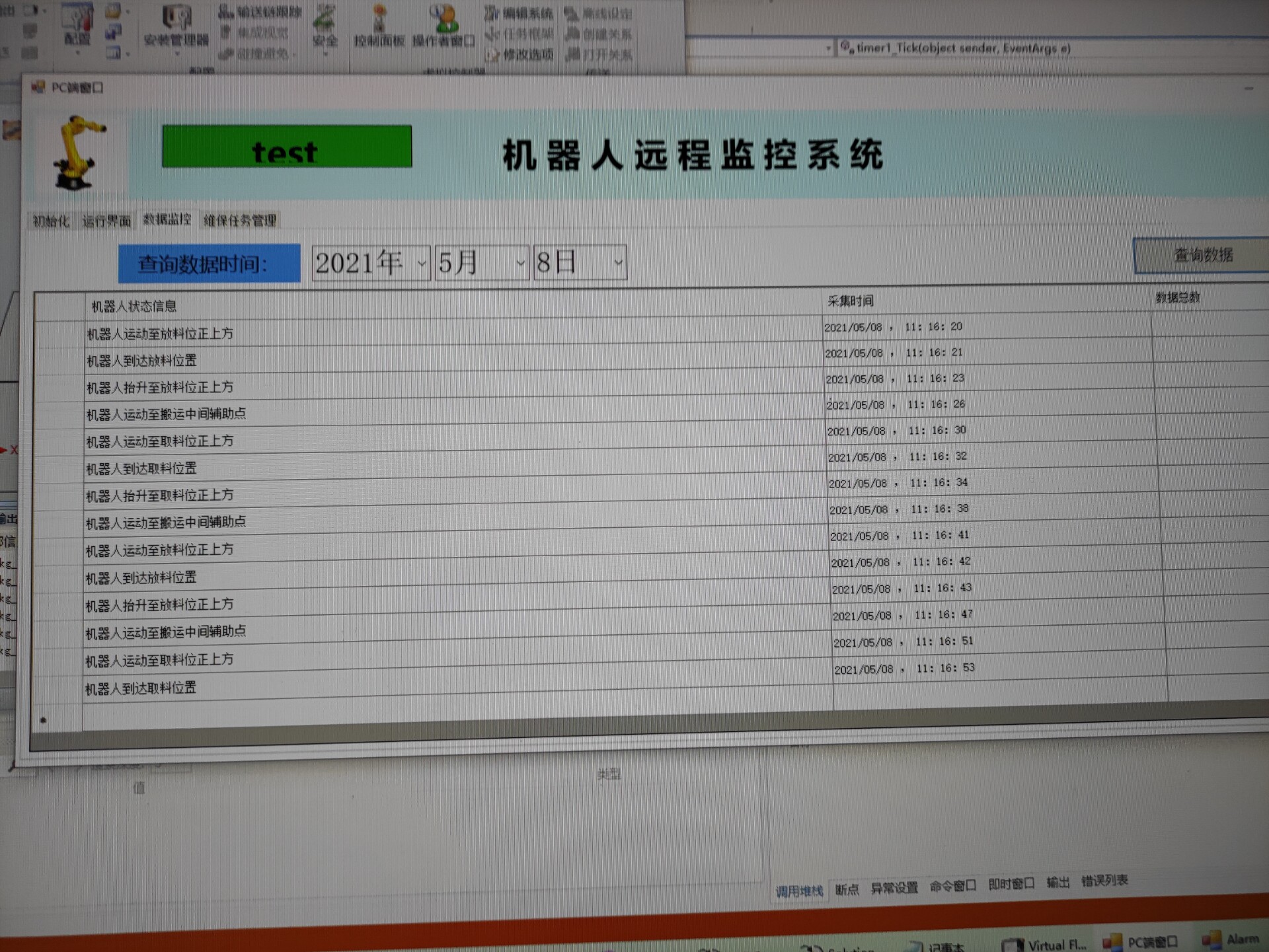
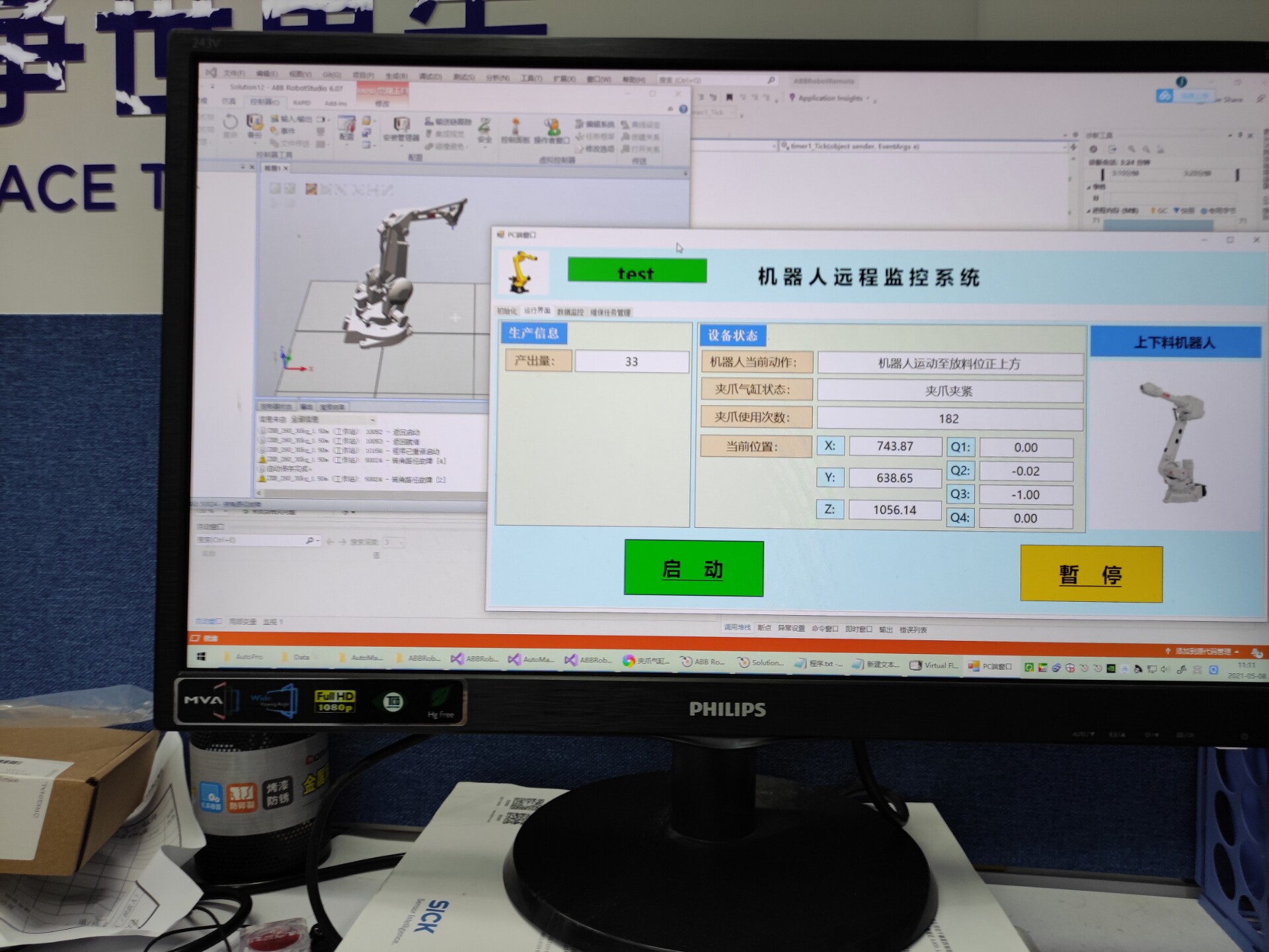
ABB机器人C#上位机,操作机器人动作及读写机器人数据。ABB机器人操作类,程序包含运行数据记录,设备报警信息显示,项目比较完整,适合自己做二次开发。在自动化控制领域,ABB机器人凭借其高精度和稳定性深受青睐。通过C#开发上位机,能够实现对ABB机器人动作的精准操控以及数据的灵活读写,今天就和大家分享一个相对完整的项目示例,不仅涵盖了机器人的基础操作,还包含运行数据记录与设备报警信息显示,为二次开
ABB机器人C#上位机,操作机器人动作及读写机器人数据。 ABB机器人操作类,程序包含运行数据记录,设备报警信息显示,项目比较完整,适合自己做二次开发。
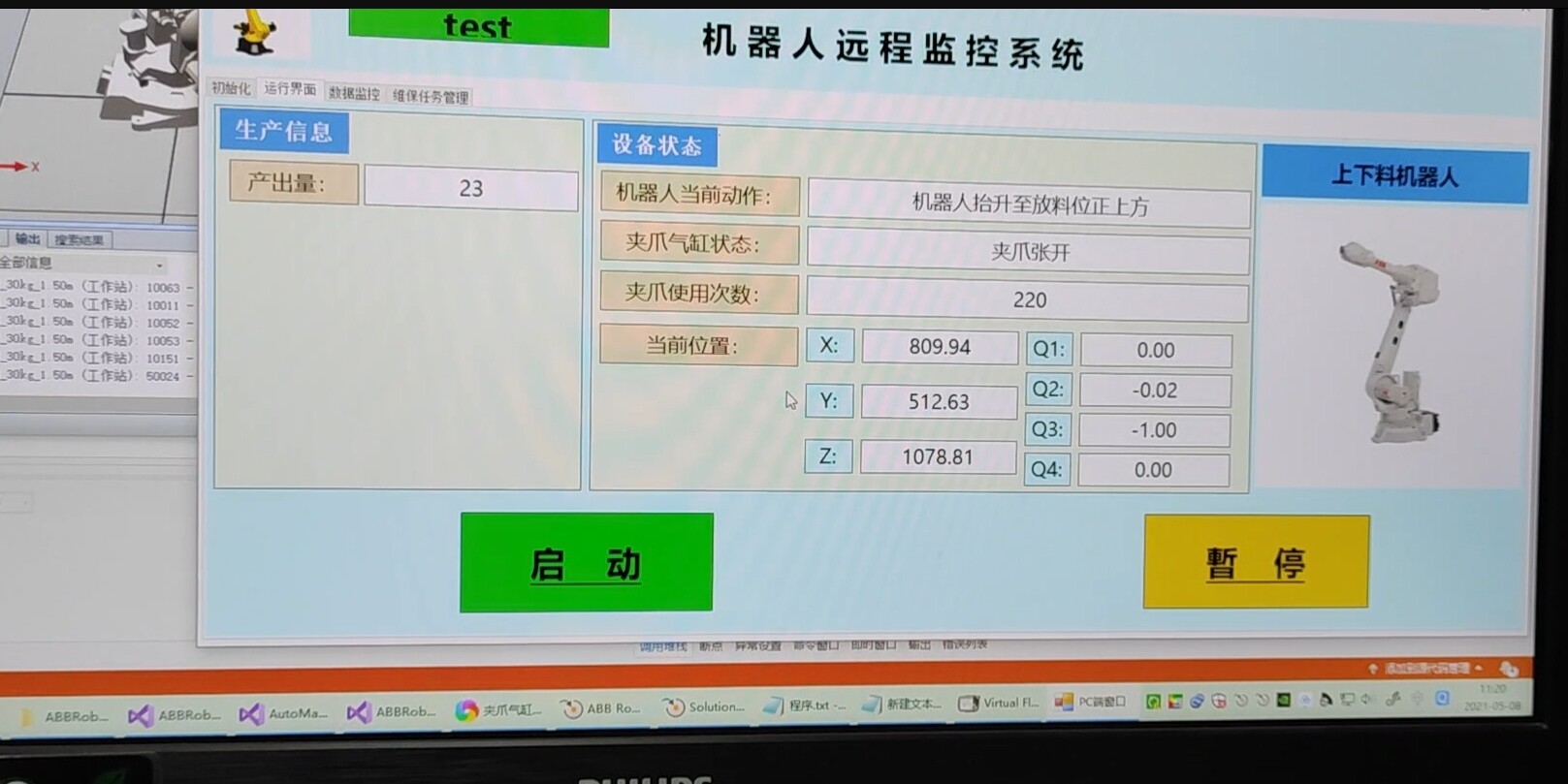
在自动化控制领域,ABB机器人凭借其高精度和稳定性深受青睐。通过C#开发上位机,能够实现对ABB机器人动作的精准操控以及数据的灵活读写,今天就和大家分享一个相对完整的项目示例,不仅涵盖了机器人的基础操作,还包含运行数据记录与设备报警信息显示,为二次开发奠定良好基础。
ABB机器人操作类的构建
首先,我们需要构建一个用于操作ABB机器人的C#类。这个类将封装与机器人交互的各种方法。
using System;
using System.Collections.Generic;
using System.Linq;
using System.Text;
using System.Threading.Tasks;
// 引入ABB机器人相关的命名空间,具体根据实际SDK确定
using ABB.Robotics.Controllers;
using ABB.Robotics.Controllers.Discovery;
public class ABBRobotOperator
{
private Controller _controller;
private Robot _robot;
public ABBRobotOperator(string ipAddress)
{
var controllerInfo = ControllerInfoFactory.CreateFromUrl($"http://{ipAddress}");
_controller = ControllerFactory.CreateFromUrl(controllerInfo.Url);
_controller.Connect();
_robot = _controller.Robots.FirstOrDefault();
}
// 控制机器人移动到指定位置的方法
public void MoveRobotToPosition(double x, double y, double z)
{
if (_robot!= null)
{
var targetPosition = new TargetPosition(x, y, z);
_robot.Move(targetPosition);
}
else
{
Console.WriteLine("机器人未正确连接或获取。");
}
}
// 读取机器人当前位置数据的方法
public TargetPosition GetRobotCurrentPosition()
{
if (_robot!= null)
{
return _robot.CurrentPosition;
}
else
{
Console.WriteLine("机器人未正确连接或获取。");
return null;
}
}
}代码分析
- 命名空间引入:
using ABB.Robotics.Controllers;和using ABB.Robotics.Controllers.Discovery;这两个命名空间是与ABB机器人控制器交互的关键,通过它们可以发现并连接到机器人控制器。 - 构造函数:
ABBRobotOperator(string ipAddress)函数接收机器人控制器的IP地址,通过ControllerInfoFactory和ControllerFactory创建并连接到控制器,然后获取机器人实例。这里的连接过程就像是给上位机和机器人搭建了一座通信桥梁。 - 移动机器人方法:
MoveRobotToPosition(double x, double y, double z)根据传入的坐标参数创建目标位置,并调用机器人的Move方法移动到该位置。如果机器人实例未正确获取,会给出提示信息。这就好比给机器人下达前往特定地点的指令。 - 获取当前位置方法:
GetRobotCurrentPosition()返回机器人的当前位置。同样,如果机器人未正确连接,会给出提示。就像询问机器人“你现在在哪里?”
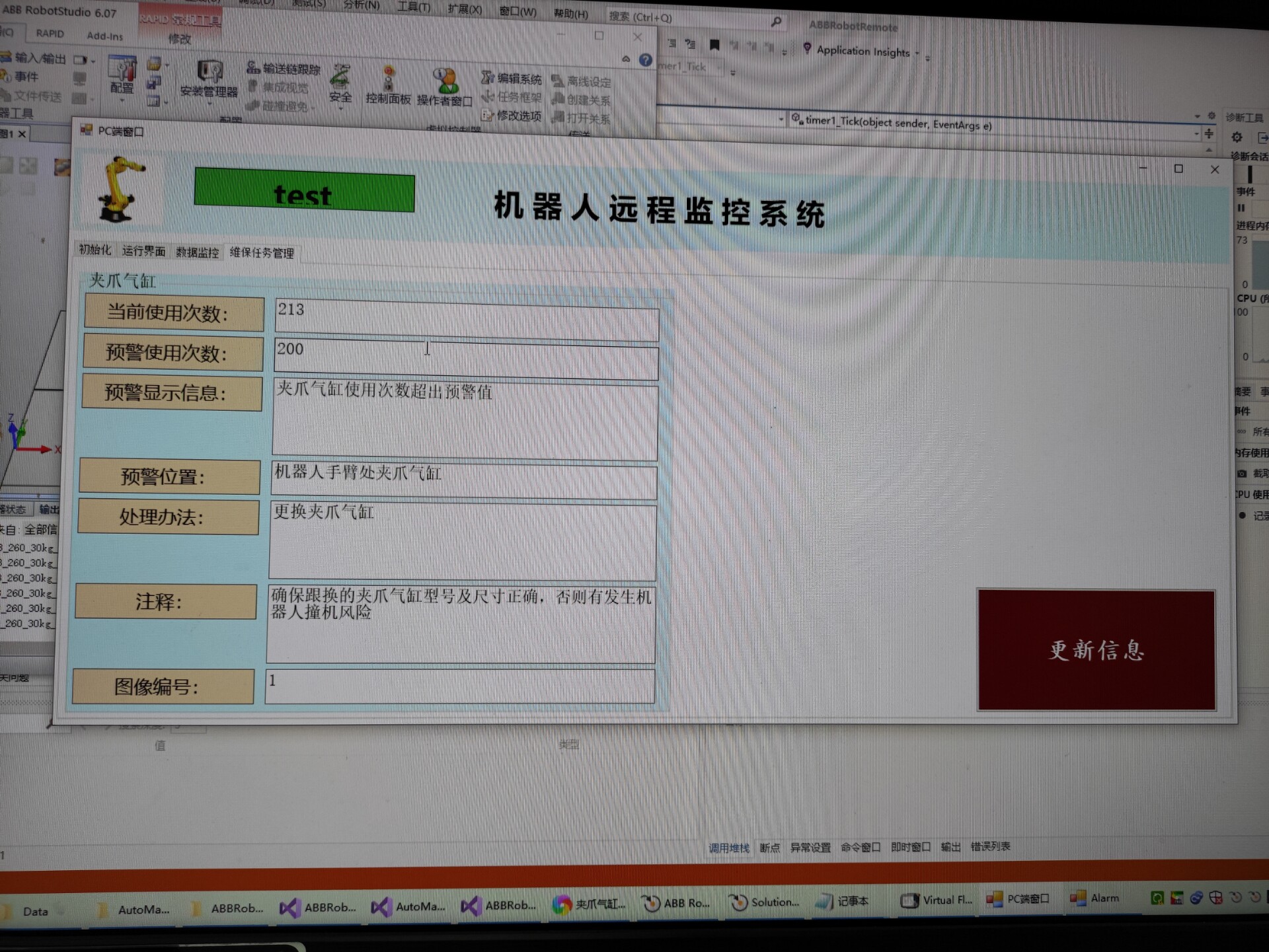
运行数据记录功能实现
运行数据记录对于分析机器人的工作状态和性能至关重要。我们可以在上述类的基础上进行扩展。
using System.IO;
public class ABBRobotOperator
{
// 之前的代码...
private const string LogFilePath = "robot_operation_log.txt";
public void LogOperation(string operation, TargetPosition position)
{
using (StreamWriter writer = File.AppendText(LogFilePath))
{
writer.WriteLine($"{DateTime.Now}: {operation} at position X: {position.X}, Y: {position.Y}, Z: {position.Z}");
}
}
}代码分析
- 日志文件路径定义:
private const string LogFilePath = "robotoperationlog.txt";定义了运行数据记录的日志文件路径。这就像是给记录数据找了一个“存放仓库”。 - 记录操作方法:
LogOperation(string operation, TargetPosition position)方法使用StreamWriter将操作信息(如移动操作)和对应的位置信息,以及操作时间写入日志文件。每一次记录就像是在记录机器人的“行动轨迹”。
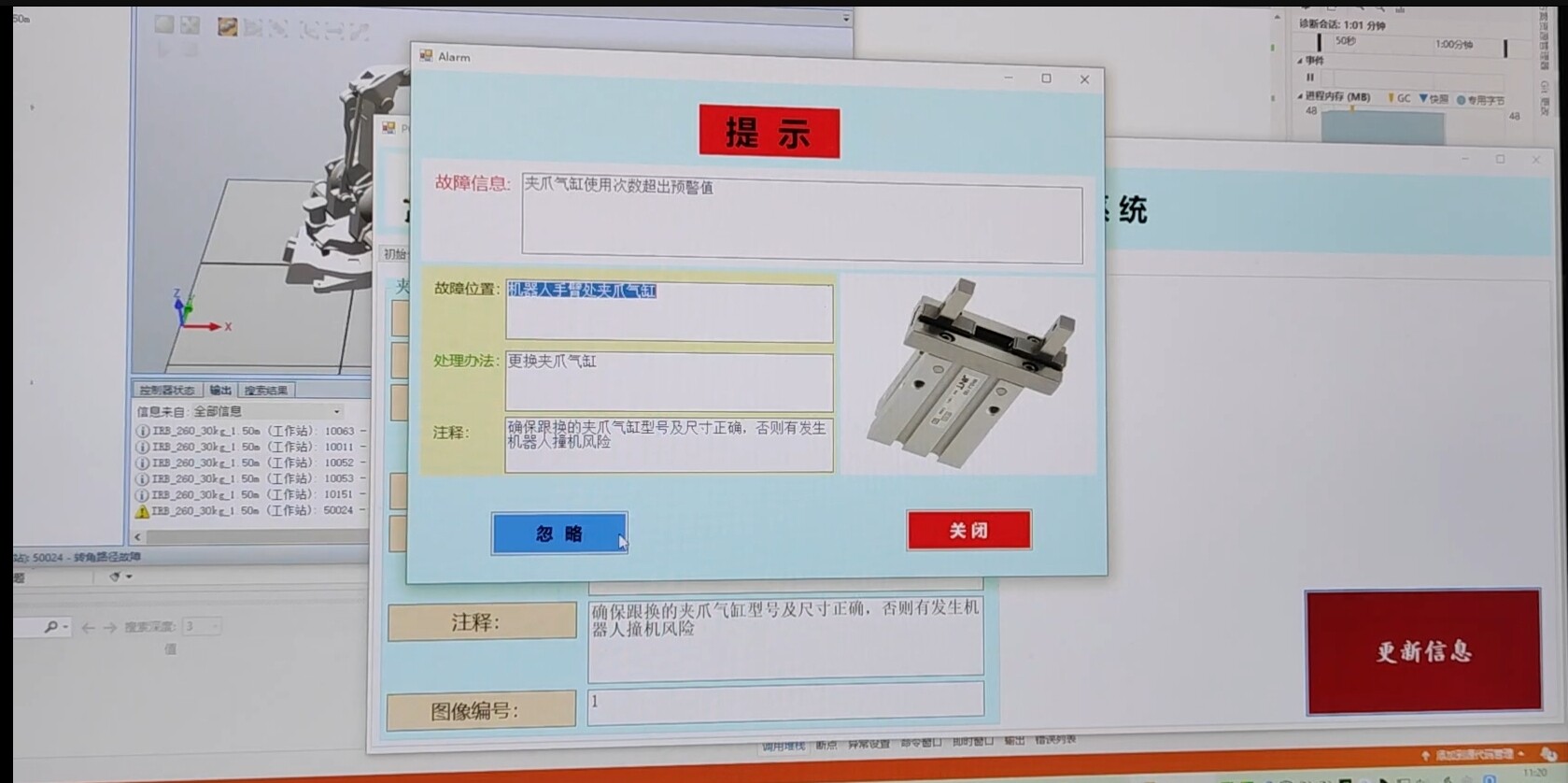
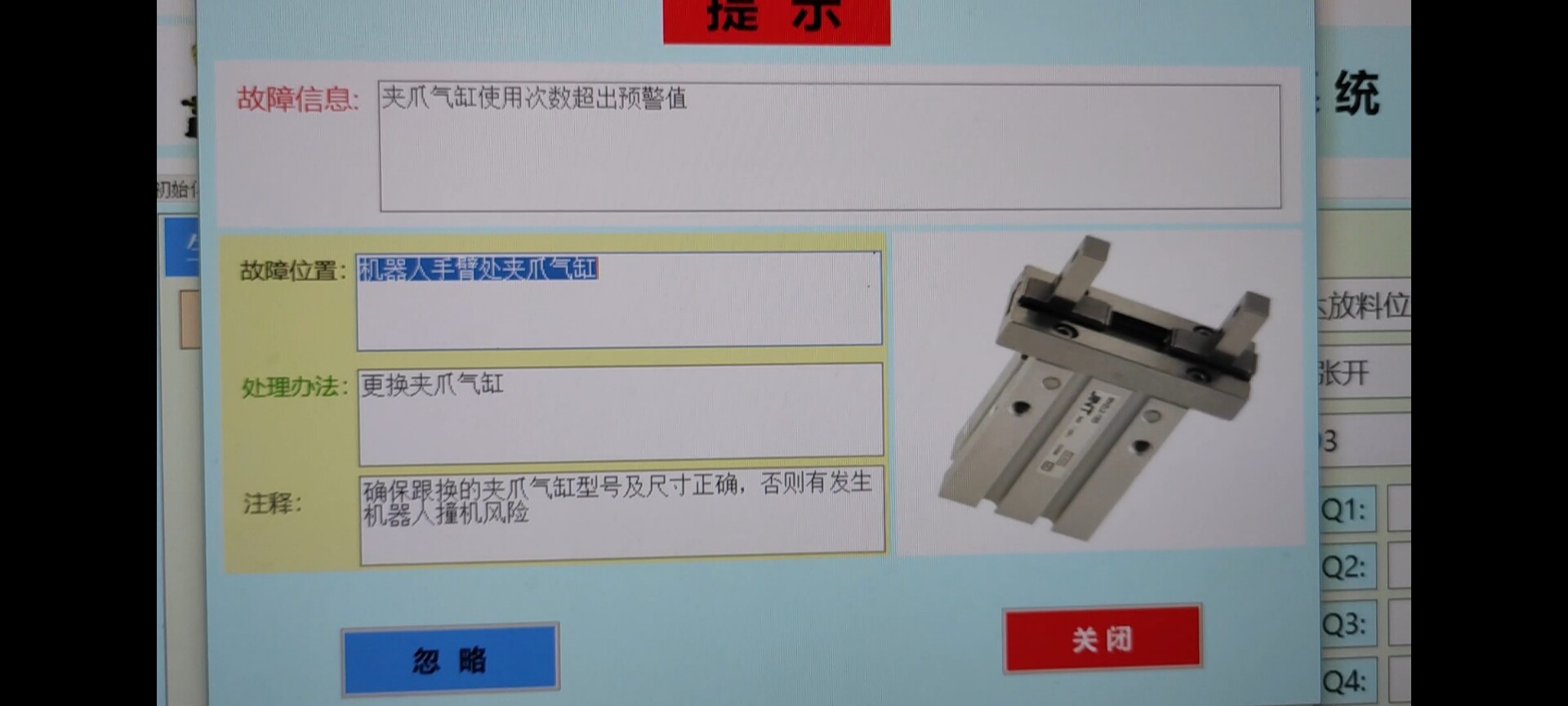
设备报警信息显示
设备报警信息及时显示能够帮助我们快速响应并解决机器人运行过程中的问题。
public class ABBRobotOperator
{
// 之前的代码...
public void CheckAndDisplayAlarms()
{
if (_controller!= null)
{
var alarms = _controller.Alarms.GetAlarms();
foreach (var alarm in alarms)
{
Console.WriteLine($"Alarm ID: {alarm.Id}, Alarm Message: {alarm.Message}");
}
}
else
{
Console.WriteLine("控制器未正确连接。");
}
}
}代码分析
- 检查并显示报警方法:
CheckAndDisplayAlarms()通过控制器获取所有报警信息,并遍历显示报警ID和报警消息。如果控制器未正确连接,则给出提示。这就像是给机器人安装了一个“警报监测器”,实时反馈机器人的异常情况。
通过上述代码,我们构建了一个较为完整的ABB机器人C#上位机操作项目。它不仅可以控制机器人动作、读写数据,还具备运行数据记录和设备报警信息显示功能,为后续的二次开发提供了丰富的基础功能,大家可以根据实际需求进一步扩展和优化。无论是工业自动化生产线,还是科研实验中的机器人应用场景,这样的上位机开发都能发挥重要作用。
ABB机器人C#上位机,操作机器人动作及读写机器人数据。 ABB机器人操作类,程序包含运行数据记录,设备报警信息显示,项目比较完整,适合自己做二次开发。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐


 23
23 0
0- 0



 已为社区贡献8条内容
已为社区贡献8条内容

所有评论(0)