西门子PLC1200立体库机器人码垛机伺服视觉AGV程序大揭秘
西门子PLC1200立体库机器人码垛机伺服视觉AGV程序包括2台西门子PLC1215程序和2台西门子触摸屏TP700程序PLC和基恩士相机视觉定位Modbus TCP通讯(SCL语言)PLC和ABB机器人Modbus TCP通讯(SCL语言)PLC和码垛机Modbus TCP通讯(SCL语言)PLC和4台G120变频器Profinet通讯1个伺服轴,AGVSCL语言和梯形图混编,经典程序,知识点丰
西门子PLC1200立体库机器人码垛机伺服视觉AGV程序 包括2台西门子PLC1215程序和2台西门子触摸屏TP700程序 PLC和基恩士相机视觉定位Modbus TCP通讯(SCL语言) PLC和ABB机器人Modbus TCP通讯(SCL语言) PLC和码垛机Modbus TCP通讯(SCL语言) PLC和4台G120变频器Profinet通讯 1个伺服轴,AGV SCL语言和梯形图混编,经典程序,知识点丰富,注释全。
在自动化控制领域,西门子PLC1200系列凭借其强大的功能和灵活性,广泛应用于各类复杂系统。今天就来聊聊包含两台西门子PLC1215程序、两台西门子触摸屏TP700程序的立体库机器人码垛机伺服视觉AGV程序,这里面涉及多种设备通讯以及丰富的编程技巧,知识点满满哦!
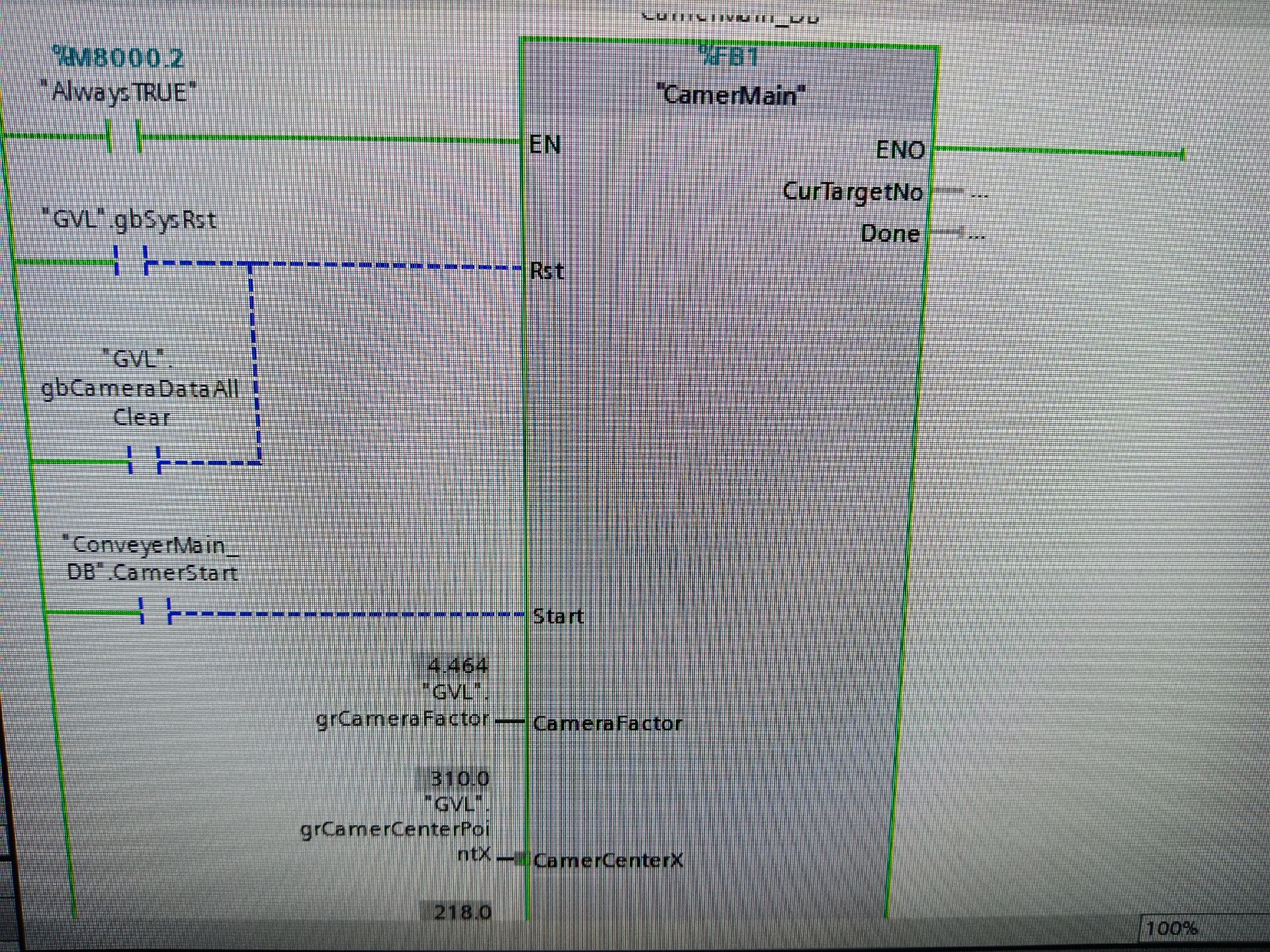
PLC与基恩士相机视觉定位Modbus TCP通讯(SCL语言)
Modbus TCP是工业领域常用的通讯协议,用于实现不同设备间的数据交互。在与基恩士相机通讯时,我们使用SCL语言来编写代码,下面是一个简单示例:
VAR
// 定义通讯相关变量
MB_CLIENT : "MB_CLIENT";
DataBuffer : ARRAY[0..255] OF BYTE;
ErrorID : WORD;
END_VAR
// 初始化通讯
MB_CLIENT(REQ := TRUE,
MB_ADDR := 1,
IP_ADDR := '192.168.0.10',
DB_NO := 10,
DATA_PTR := P#DataBuffer[0],
LEN := 256,
ERROR := ErrorID);代码分析:首先我们声明了一个 MBCLIENT 实例,它是西门子用于Modbus TCP通讯的功能块。DataBuffer 数组用于存储从相机接收的数据,ErrorID 用来记录通讯过程中出现的错误。在调用 MBCLIENT 功能块时,REQ 置为 TRUE 表示请求一次通讯,MBADDR 是相机的Modbus地址,IPADDR 是相机的IP地址,DBNO 是数据存储的DB块号,DATAPTR 指向数据存储区,LEN 表示要传输的数据长度。通过这种方式,PLC就能与基恩士相机进行数据交互,获取视觉定位信息。
PLC与ABB机器人Modbus TCP通讯(SCL语言)
与ABB机器人的通讯同样基于Modbus TCP,代码风格类似但细节不同:
VAR
Robot_MB_CLIENT : "MB_CLIENT";
Robot_DataBuffer : ARRAY[0..255] OF BYTE;
Robot_ErrorID : WORD;
END_VAR
// 机器人通讯初始化
Robot_MB_CLIENT(REQ := TRUE,
MB_ADDR := 2,
IP_ADDR := '192.168.0.20',
DB_NO := 11,
DATA_PTR := P#Robot_DataBuffer[0],
LEN := 256,
ERROR := Robot_ErrorID);分析:这里创建了 RobotMBCLIENT 功能块实例,专门用于与ABB机器人通讯。同样设置了相关参数,不同的是 MBADDR 和 IPADDR 根据机器人实际情况配置,数据存储在 RobotDataBuffer 数组,错误信息存于 RobotErrorID 中。通过这样的通讯,PLC可以向机器人发送指令,如控制机器人的动作,或者接收机器人的状态信息。
PLC与码垛机Modbus TCP通讯(SCL语言)
VAR
Palletizer_MB_CLIENT : "MB_CLIENT";
Palletizer_DataBuffer : ARRAY[0..255] OF BYTE;
Palletizer_ErrorID : WORD;
END_VAR
// 码垛机通讯初始化
Palletizer_MB_CLIENT(REQ := TRUE,
MB_ADDR := 3,
IP_ADDR := '192.168.0.30',
DB_NO := 12,
DATA_PTR := P#Palletizer_DataBuffer[0],
LEN := 256,
ERROR := Palletizer_ErrorID);对于码垛机通讯,原理也是一样的。通过 PalletizerMBCLIENT 功能块实例,PLC与码垛机建立Modbus TCP连接,传输数据。MBADDR、IPADDR 等参数对应码垛机的实际配置,这样就能实现对码垛机的控制,比如告诉码垛机何时开始码垛、码垛的模式等。
PLC与4台G120变频器Profinet通讯
Profinet是西门子主推的工业以太网通讯协议,用于实现PLC与变频器等设备的高速通讯。在硬件组态完成后,我们可以在程序中这样控制变频器:
在OB1中:
VAR
Drive1_CTRL : "Drive_Control";
Drive2_CTRL : "Drive_Control";
Drive3_CTRL : "Drive_Control";
Drive4_CTRL : "Drive_Control";
END_VAR
// 控制变频器1
Drive1_CTRL(Enable := TRUE,
Speed := 50.0,
Torque := 100.0,
Fault := Drive1_Fault,
Status := Drive1_Status);
// 类似地控制变频器2、3、4
Drive2_CTRL(Enable := TRUE,
Speed := 40.0,
Torque := 90.0,
Fault := Drive2_Fault,
Status := Drive2_Status);
Drive3_CTRL(Enable := TRUE,
Speed := 30.0,
Torque := 80.0,
Fault := Drive3_Fault,
Status := Drive3_Status);
Drive4_CTRL(Enable := TRUE,
Speed := 20.0,
Torque := 70.0,
Fault := Drive4_Fault,
Status := Drive4_Status);代码分析:这里定义了4个 Drive_Control 实例,分别对应4台G120变频器。通过设置 Enable(使能)、Speed(速度)、Torque(转矩)等参数来控制变频器的运行。Fault 和 Status 用于获取变频器的故障和状态信息,方便我们在程序中进行异常处理和状态监控。
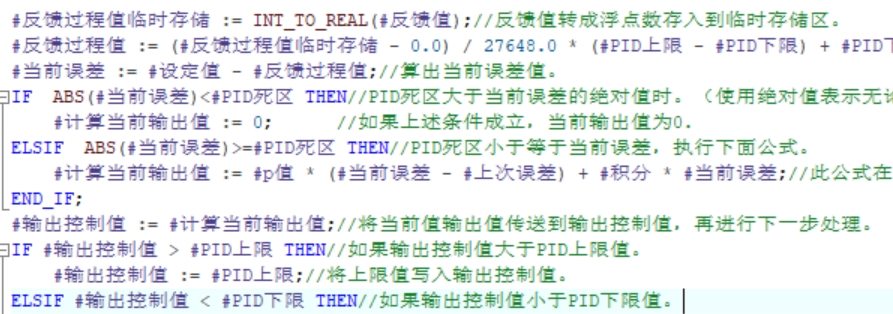
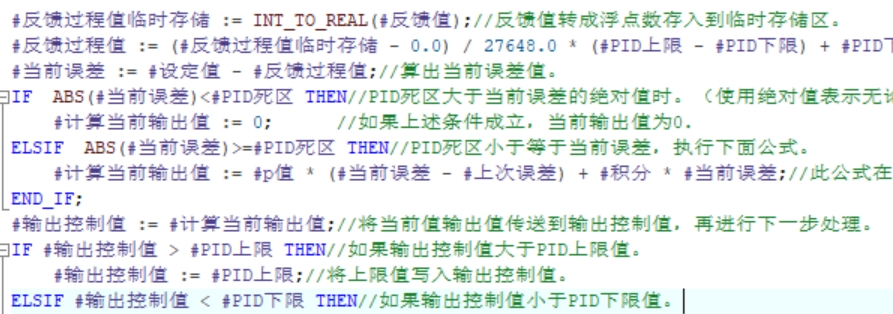
1个伺服轴与AGV控制
在这个项目中,还涉及到一个伺服轴以及AGV的控制。我们可以用SCL语言结合梯形图来实现。
西门子PLC1200立体库机器人码垛机伺服视觉AGV程序 包括2台西门子PLC1215程序和2台西门子触摸屏TP700程序 PLC和基恩士相机视觉定位Modbus TCP通讯(SCL语言) PLC和ABB机器人Modbus TCP通讯(SCL语言) PLC和码垛机Modbus TCP通讯(SCL语言) PLC和4台G120变频器Profinet通讯 1个伺服轴,AGV SCL语言和梯形图混编,经典程序,知识点丰富,注释全。
比如在SCL中设置伺服轴的参数:
VAR
Axis1 : "AXIS_CTRL";
END_VAR
Axis1(Enable := TRUE,
Position := 100.0,
Velocity := 50.0,
Acceleration := 10.0,
Deceleration := 10.0);分析:Axis1 是伺服轴控制功能块实例,通过设置 Enable 启动伺服轴,Position 设定目标位置,Velocity、Acceleration 和 Deceleration 分别设置速度、加速度和减速度。
而在梯形图中,可以利用一些基本的逻辑指令,比如常开常闭触点,来实现对AGV的简单逻辑控制,比如前进、后退、停止等操作。这里就不详细列出梯形图代码啦,但通过SCL和梯形图混编,我们能充分发挥两种编程方式的优势,让程序更加简洁高效。
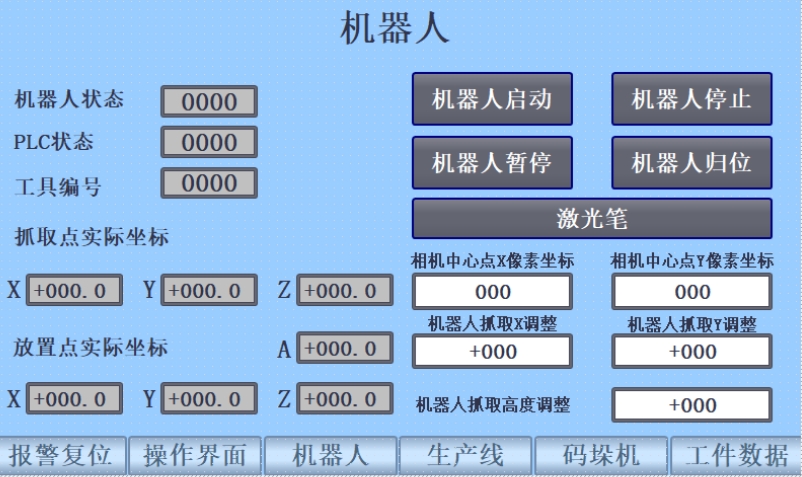
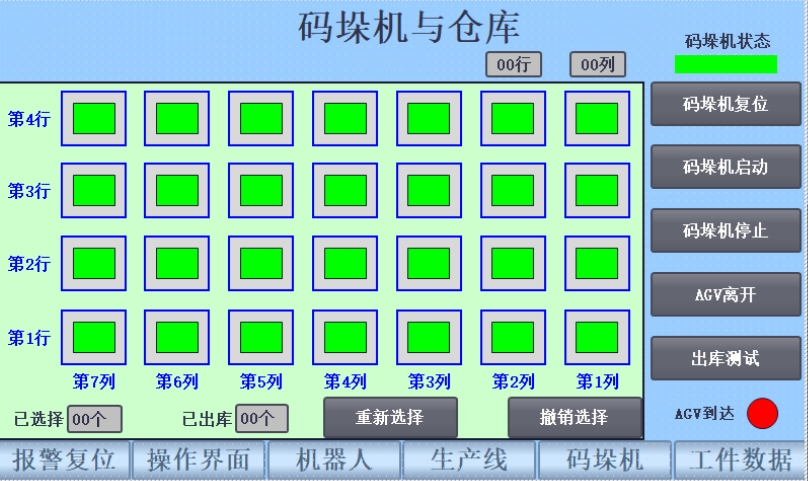
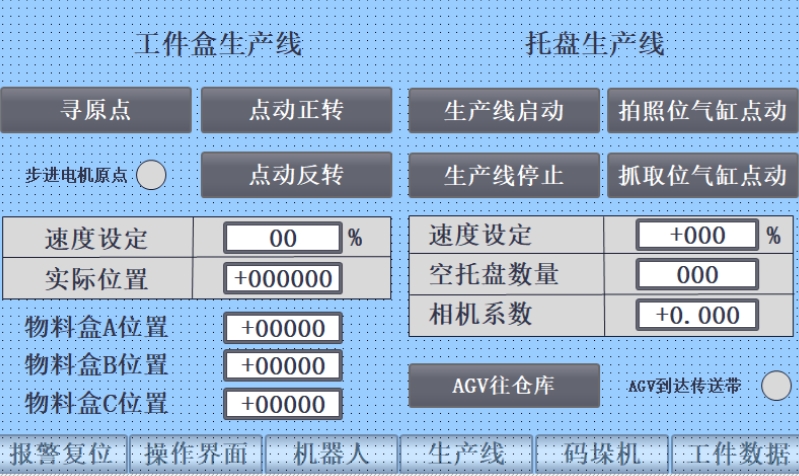
西门子触摸屏TP700程序
触摸屏程序则主要用于人机交互,方便操作人员监控和控制整个系统。在TP700触摸屏中,我们可以创建各种画面,比如设备状态监控画面、参数设置画面等。通过变量关联,将PLC中的数据实时显示在触摸屏上,同时操作人员也能通过触摸屏向PLC发送指令。
总的来说,这个立体库机器人码垛机伺服视觉AGV程序融合了多种设备通讯、不同编程方式,是一个非常经典且知识点丰富的项目。无论是对于学习自动化控制的新手,还是经验丰富的工程师,都有很多值得借鉴和学习的地方。希望通过这篇博文,能让大家对这类复杂系统的编程有更深入的理解!

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐


 11
11 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)