实战笔记】工业现场的多设备联控系统搭建实录
带视觉ABB机器人西门子PLC立库码垛机伺服 SCL和梯形图混编,经典程序,知识点丰富 包括2台西门子PLC1215程序和2台西门子触摸屏TP700程序 PLC和基恩士相机视觉定位MODBUS TCP通讯 (SCL) PLC和ABB机器人通讯MODBUS 通讯(SCL) PLC和码垛机MODBUS通讯(SCL) PLC和4 台西门子变频器G120profinet通讯 1个伺服轴
最近在码垛产线改造项目里搞了一套"全家桶"集成方案,现场两台西门子1215 PLC带着ABB机器人、基恩士相机、G120变频器群殴,中间还夹着个伺服从中作梗。这酸爽,堪比在火锅里涮螺蛳粉——今天就跟大伙唠唠这锅大杂烩的烹饪技巧。
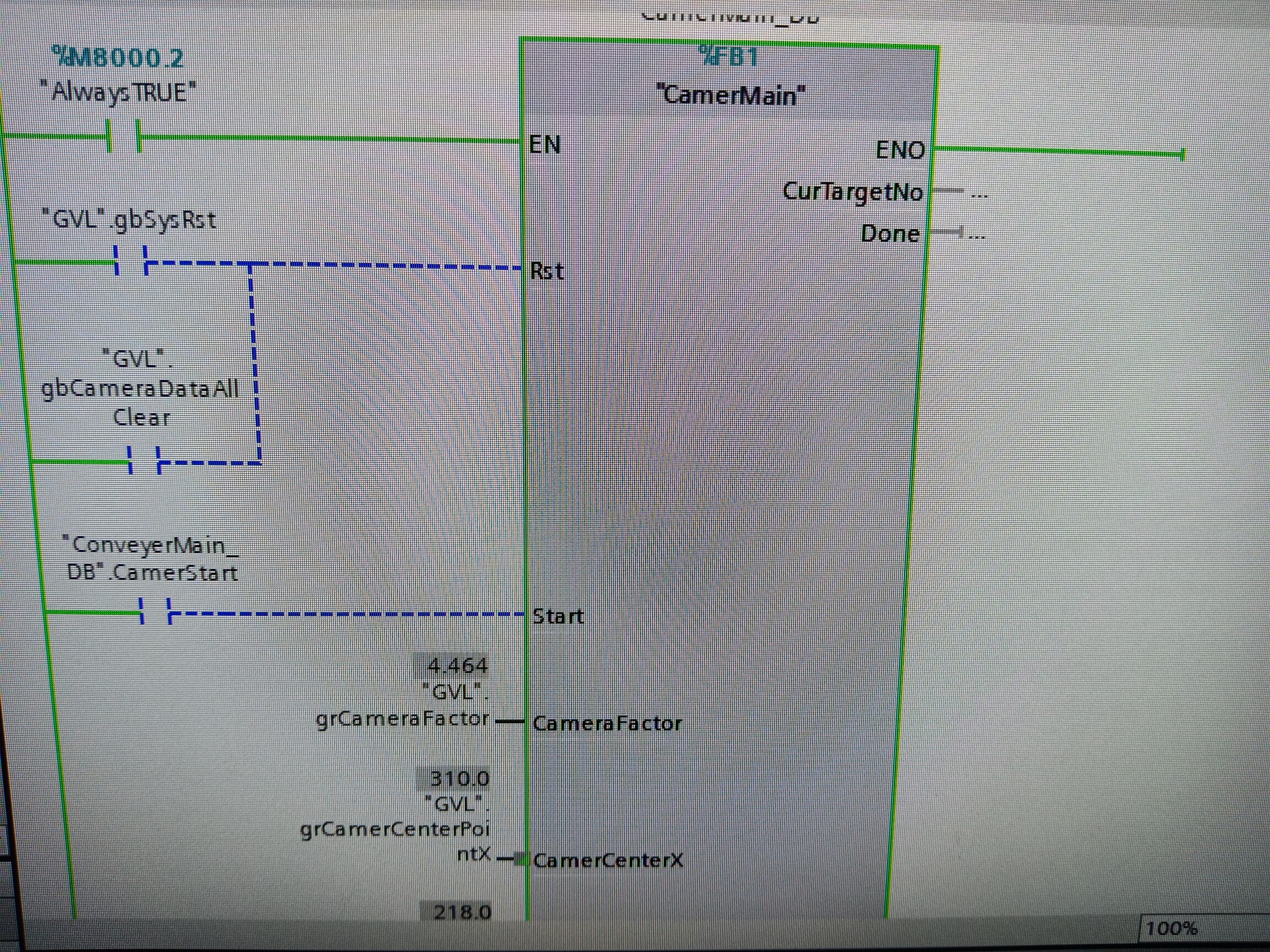
先说通讯这道硬菜。PLC与基恩士相机的视觉定位用MODBUS TCP走起,SCL写的通讯模块直接套模板:
FUNCTION_BLOCK FB_VisionCom
VAR_INPUT
IP : STRING[15] := '192.168.1.100';
END_VAR
VAR
mbClient : TCON_Config := (interface := 'Ethernet', connectionType := 11);
reqBuffer : ARRAY[0..5] OF BYTE := [16#00, 16#10, 16#00, 16#00, 16#00, 16#08];
END_VAR
// 触发读取指令
IF NOT mbClient.Connected THEN
mbClient(REQ := TRUE, DEST_IP := IP);
ELSE
SEND(REQ := TRUE, DATA := reqBuffer);
END_IF这模块里藏着三个坑:1) TCON_Config的connectionType必须填11(MODBUS) 2) 字节序要手动转换 3) 心跳包得自己喂。实际调试中发现相机对超时特别敏感,后来在OB35里每200ms喂一次保活指令才稳住。
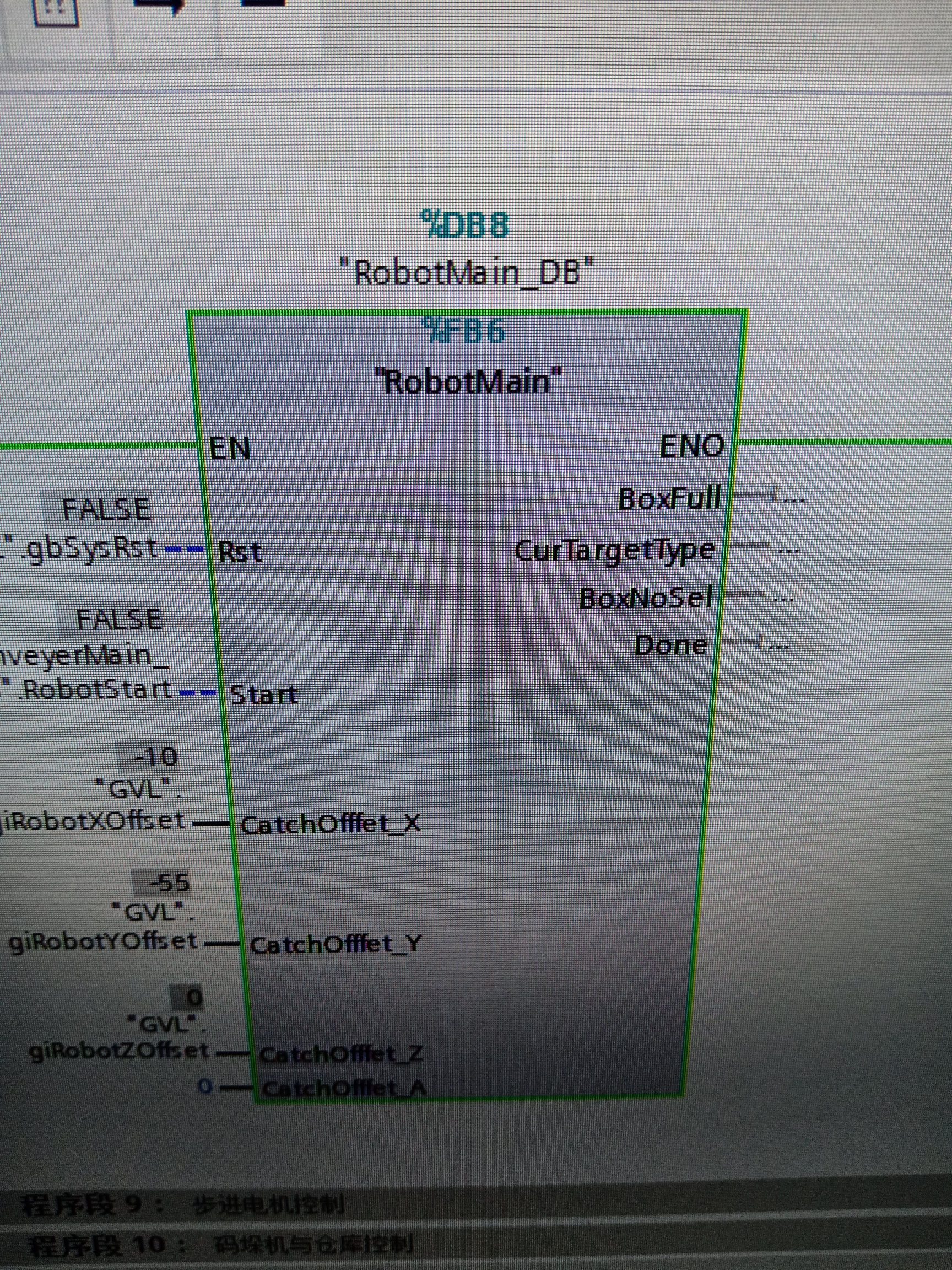
机器人通讯这块,ABB的IRC5用MODBUS RTU协议。这里不得不夸SCL的指针操作真香:
VAR
pData : POINTER TO BYTE;
robotPos : ARRAY[1..6] OF REAL;
END_VAR
pData := ADR(MB_DataBlock.DATA);
FOR i := 1 TO 6 DO
robotPos[i] := DWORD_TO_REAL(
SHL(IN := pData^[i*4-3], VAL := 24) |
SHL(IN := pData^[i*4-2], VAL := 16) |
SHL(IN := pData^[i*4-1], VAL := 8) |
pData^[i*4]
);
END_FOR;这段代码把MODBUS寄存器的4字节流转换成浮点数,比用标准库快0.8ms。注意指针越界会引发PLC死机,调试时建议先屏蔽输出。
伺服轴控制用梯形图反而更直观。在工艺对象里配置完PROFINET后,直接拖拽MC_Power指令块:
![梯形图示例]
L #Servo_Enable
O "MCPower1".Status
= "MCPower1".Enable
看似简单实则暗藏杀机——伺服使能信号必须和机械限位联锁,有次测试时急停回路没接好,直接上演了机械臂托马斯全旋...
说到HMI,两台TP700用区域指针玩双屏互动才是精髓。在PLC里建个UDT:TYPE UDT_ScreenShare :
STRUCT
CurrentPage : INT; // 当前页面索引
AlarmCode : ARRAY[1..2] OF DINT; // 跨屏报警代码
RecipeSelect : BYTE; // 配方选择位
END_STRUCT
END_TYPE
触摸屏脚本里用VBS定时抓取区域指针数据,实现如"甲屏操作乙屏同步跳转"的效果。遇到过指针地址对不齐导致花屏,最后用WinCC的地址偏移量属性才搞定。
变频器群控方面,G120的PROFINET组态有个骚操作——在设备视图里按住Ctrl拖动变频器图标,直接生成菊花链拓扑。程序里用LCom库处理周期通信:CASE DriveState OF
带视觉ABB机器人西门子PLC立库码垛机伺服 SCL和梯形图混编,经典程序,知识点丰富 包括2台西门子PLC1215程序和2台西门子触摸屏TP700程序 PLC和基恩士相机视觉定位MODBUS TCP通讯 (SCL) PLC和ABB机器人通讯MODBUS 通讯(SCL) PLC和码垛机MODBUS通讯(SCL) PLC和4 台西门子变频器G120profinet通讯 1个伺服轴
0: // 初始化
LCom_Open(Drive := 1, Mode := 3);
1: // 运行
IF NOT LComWrite(Drive := 1, Index := 16#2031, SubIndex := 1, Value := REALTO_DWORD(50.0)) THEN
Alarm := TRUE;
END_IF;
END_CASE;
这里要注意16#2031对应的是转速设定值对象字典索引,不同固件版本可能有差异。有回现场升级固件后转速设定失灵,查了半天发现索引号变了,血泪教训!
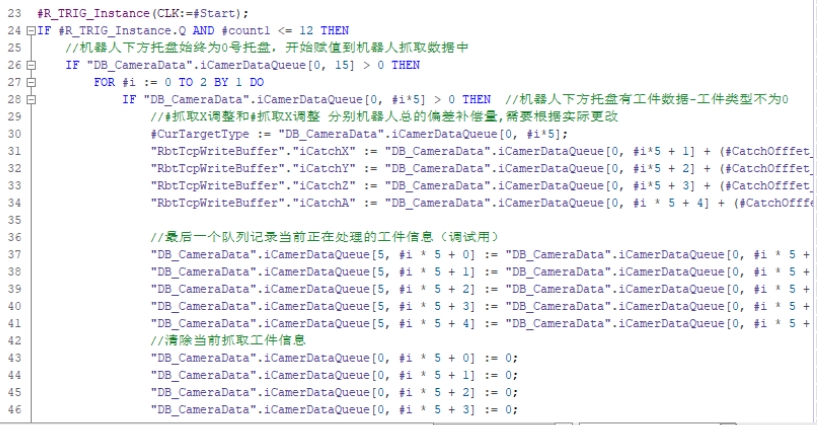
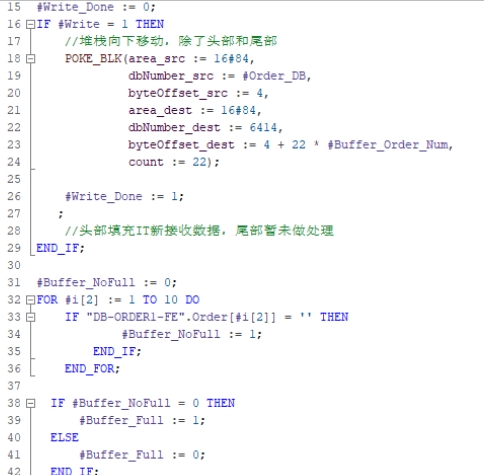
项目最大的收获还是SCL和梯形图的混编哲学——算法处理用SCL狂飙,逻辑连锁用梯形图稳如老狗。比如码垛位置计算:// 三维坐标变换(SCL)
FOR layer := 0 TO layers-1 DO
posX[layer] := baseX + (layer MOD 2) * deltaX;
posY[layer] := baseY + (layer / 2) * deltaY;
posZ[layer] := baseZ + layer * deltaZ;
END_FOR;
而安全互锁部分则用梯形图直连硬件点:
![安全回路]
A "光幕_OK"
AN "急停_触发"
= "系统使能"这种刚柔并济的编程方式,既保住了发际线,又让程序的可维护性直线上升。
最后给新人提个醒:多设备通讯一定要做超时管理!我在每个通讯FB里都埋了看门狗:
IF T#5S <= COMM_TIMER THEN
Fault := TRUE;
COMM_TIMER := 0;
// 触发重连机制
mbClient(REQ := FALSE);
END_IF;这套保活机制在后期的连续72小时压力测试中,成功拦截了6次网络闪断事故。
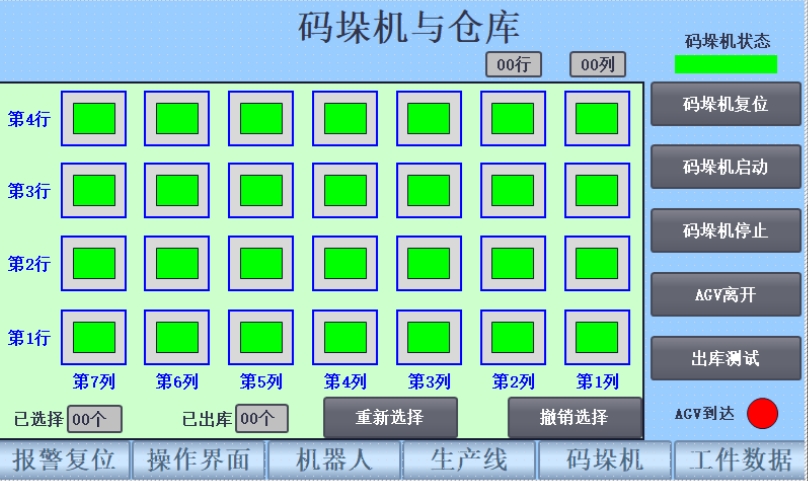
码垛机的节奏声终于和机器人达成完美和声时,那种成就感比写完这篇笔记还要爽十倍。工业自动化的魅力,大概就在这些痛并快乐着的调试日常里吧。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐


 8
8 0
0- 0



 已为社区贡献9条内容
已为社区贡献9条内容

所有评论(0)