基于监督学习的机器人碰撞检测案例
案例介绍:
以下是使用监督学习来训练机器人避障:
在这个案例中,我们的目标是训练一个神经网络模型,使得机器人在持续运行的过程中不碰撞墙壁的条件下,到达几个指定点位,并且尽可能减少假阳性的观测数据。针对机器人碰撞/未碰撞墙壁,我们将使用神经网络来做出预测。
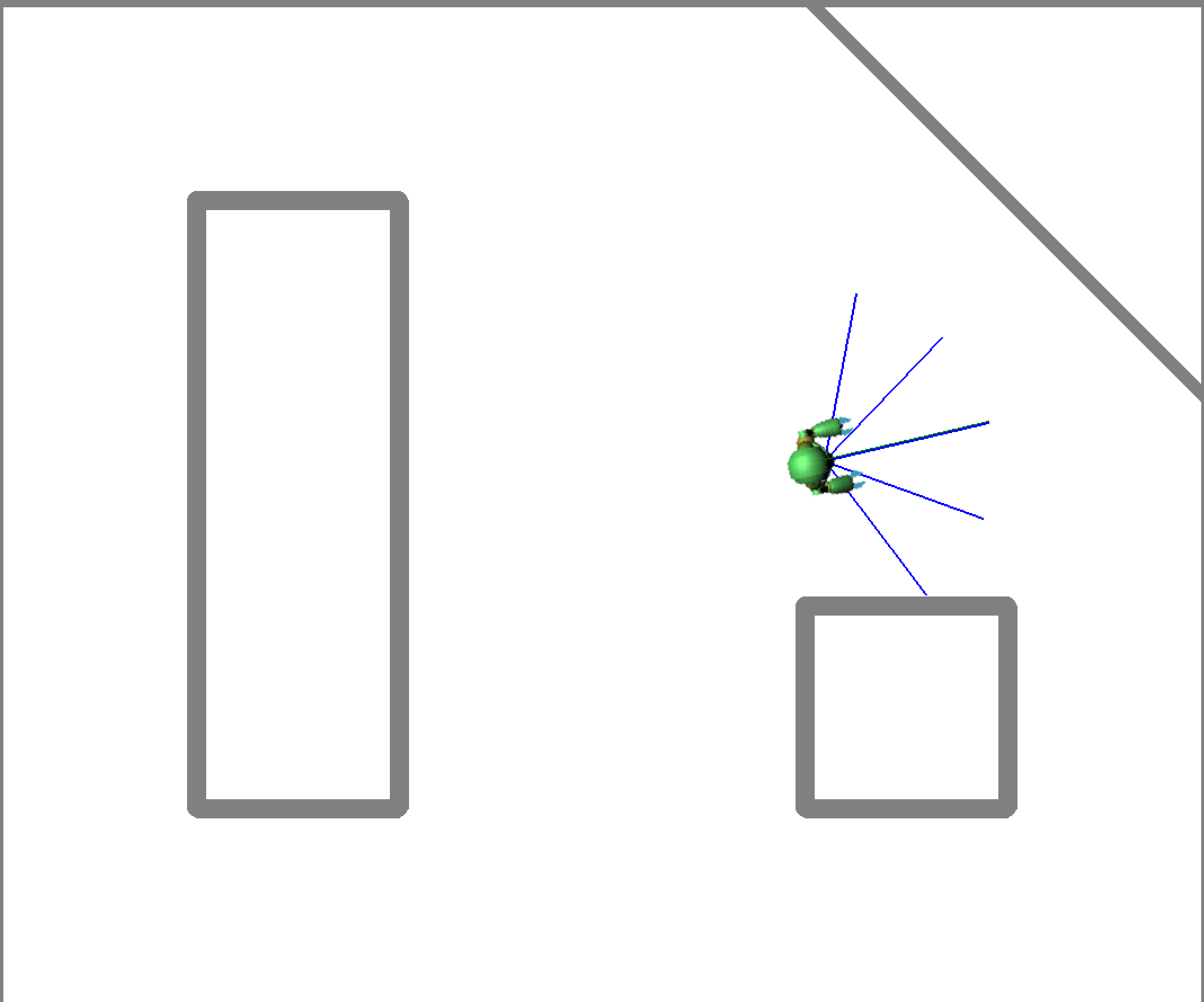
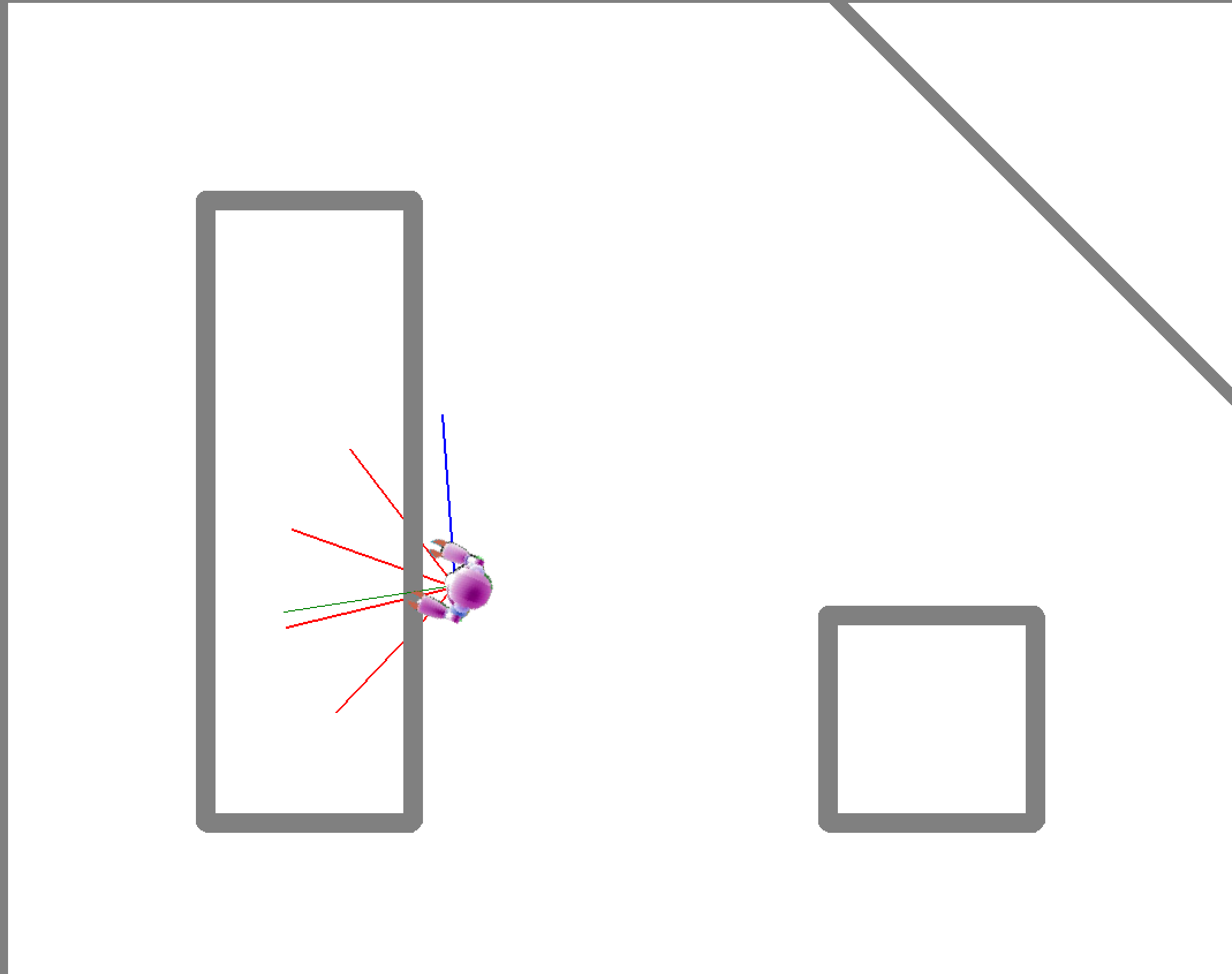
对此,我们使用pygame创建机器人避障的环境框架和渲染显示,使用pymunk为机器人设置物理引擎,比如运动控制参数,传感器观测参数。在机器人上设置前方5个方向的距离传感器,以及检查机器人碰撞产生的传感器来收集外部数据,再结合内部的转向控制参数就可以进行模型的训练了。
1. 收集数据:
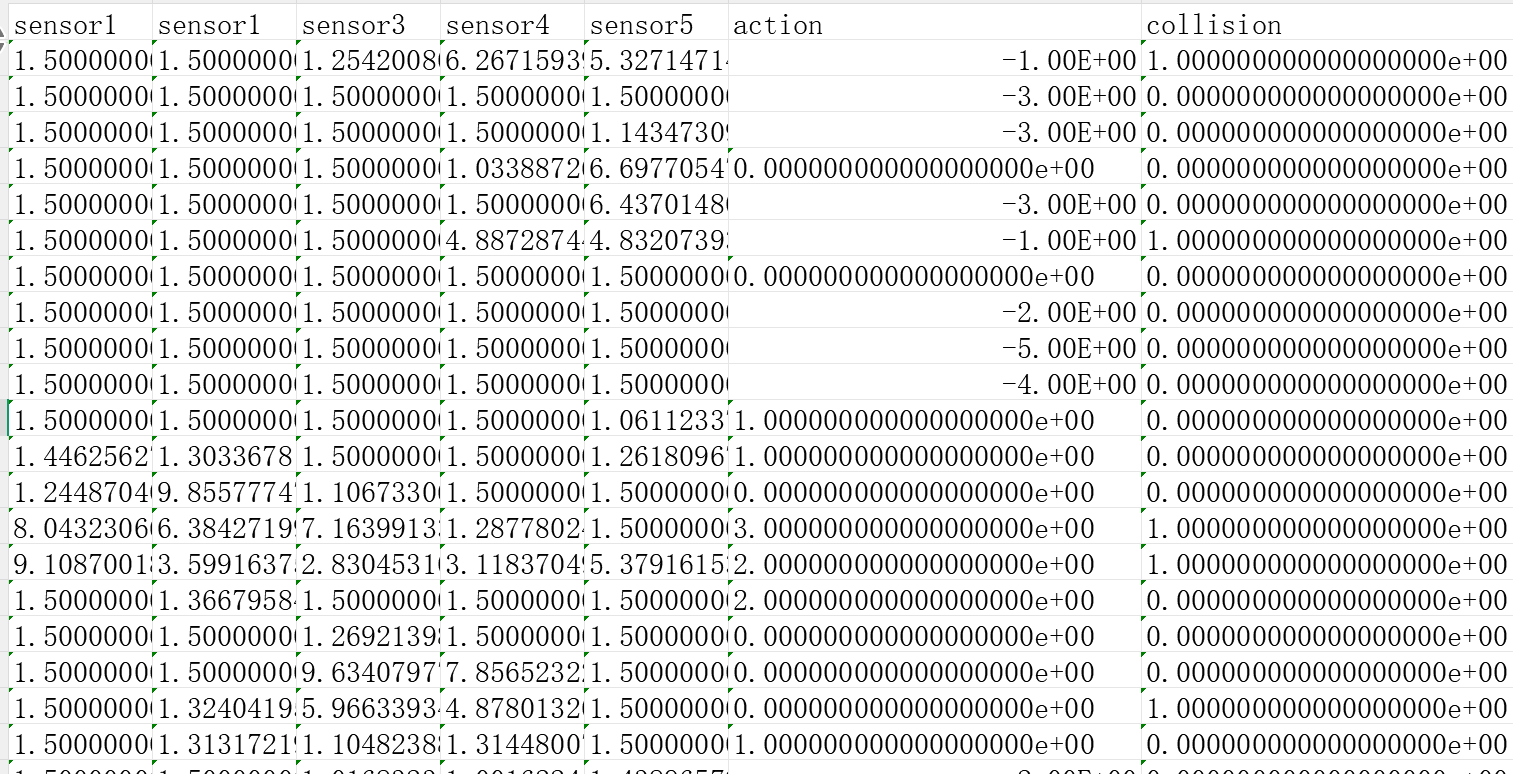
训练之前,我们需要在当前的环境中收集数据。控制机器人进入walk模式,每隔0.5s记录一次数据,数据包含5个传感器的观测数据,1个动作数据和1个碰撞状态。在walk状态下,机器人撞墙会自动复位,方便自动收集数据。收集数据的时候,我们要尽可能地让机器人进入环境所有的状态下,并且记录这个状态会不会产生碰撞。
为提升碰撞检测模型的预测准确性与场景适配性,数据收集阶段需针对高风险场景与滞后碰撞场景进行标签优化:
(1). 狭窄环境标签修正:狭窄区域的非碰撞数据本质是 “高概率碰撞的临界状态”,即使单次采样未发生碰撞,真实场景中动作微小偏差即可能引发碰撞。可根据项目需求,将此类高风险位置的非碰撞数据手动标注为碰撞标签,确保模型识别并预判临界风险。
(2). 滞后碰撞标签追溯:拐角等场景中,碰撞可能由上一动作遗留风险导致(如机器人进入死角,无论向那个方向转向,都将发生碰撞。根本原因并非转向产生碰撞,而是进入死角导致的)。若仅将碰撞标签标注在转向动作上,模型会误判风险根源。需将碰撞标签追溯至引发风险的上一动作,避免因果错位。
2. 数据修剪:
模型预测的可信度通常会偏向数据比例多的一方。所以在收集完足够的数据之后,为了避免模型对碰撞数据预测可信度过低,要对数据进行剪枝平衡。
为什么模型预测的可信度会偏向数据比例多的一方?
因为模型训练的目标就是使总损失最小化。
假设有2000 个样本(200 碰撞 + 1800 不碰撞),有以下两种预测策略:
(1)所有样本的损失都是0.1,这样总损失就是200。
(2)1800个不碰撞的损失是0.08,200个碰撞损失是0.12,得到总损失是(1800×0.08)+(200×0.12)=144+24=168。
因为策略2总损失更小,模型最终会更倾向策略2。
如何进行数据修剪呢?
首先我们要考虑,取得的数据是有时序关系的。但是我们并不像让模型学习到数据中的时序关系。所以我们要打乱数据关系,为数据做混选。然后挑选出数据中较少的类别数据,也从另一类数据中挑选相同数量的数据,达到1:1的平衡(不一定1:1是最优的平衡策略,根据最终训练结果来调整)。
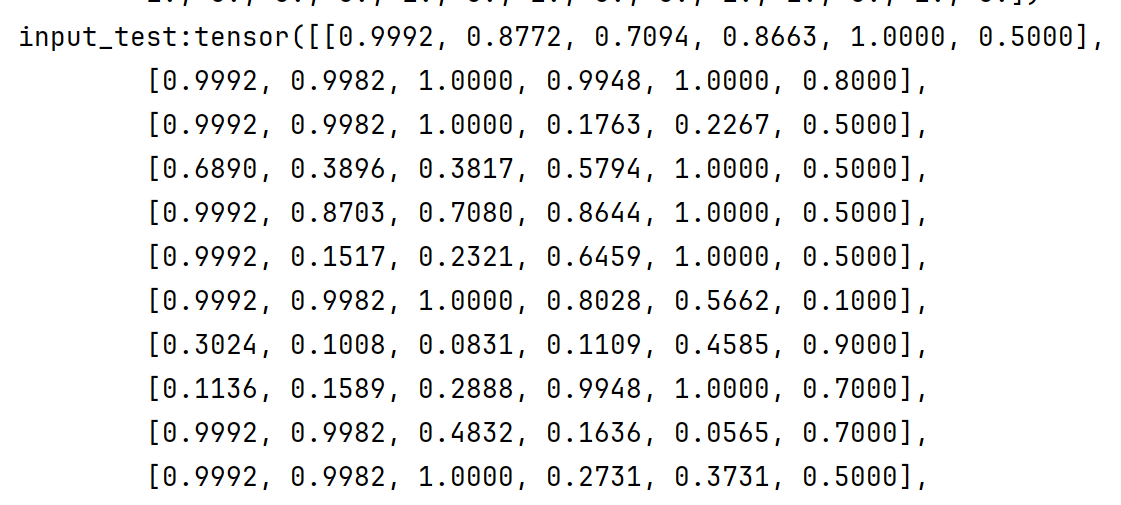
数据归一化?
从收集的数据来看每个sensor的样本特征和action的参数值所使用的量纲并不一样。我们希望模型能够平等的对待这些输入参数,因此要对输入参数进行归一化。在pytorch中可以使用self.scaler = MinMaxScaler(feature_range=(0, 1))将输入尺度缩放到(0,1)的范围上。
3. 模型选择:
碰撞预测显然是一个二分类的问题。而且对于样本点的分布很难用一条直线或者一个超平面来分割清楚。因此必须选择一个非线性模型来划分样本。激活函数可以用sigmoid或者relu,为模型增加非线性。
线性模型和非线性模型的区别?
举个例子,假设在二维平面上有一堆样本点。使用线性模型就是设计一条直线,让直线把分开样本点分成两类。而非线性模型就是设计一条曲线把样本点按类分开,而且隐藏层越多意味着曲线可以更自由更灵活,但是更容易受到噪声影响。
可参考:
【机器学习】线性(linear)与非线性(nonlinear)分类器区别_线性分类器和非线性分类器的区别-CSDN博客
选取哪种神经网络呢?PS:在其他文章会详细介绍各种网络模型。
FNN:做回归、分类典型任务的通用适配模型,像这种二分类的任务契合度比较高。
RNN:一般用来做时序依赖关系相关的预测。并不需要预测这种时序关系,相反我们还担心学习到这种时序关系影响泛化。
CNN:图像,网络输入时的常用预测模型。
LSTM:一般用来做长时间时序依赖关系相关的预测。
4. 网络构建
FNN包含输入层、隐藏层和输出层。
输入层:接受归一化的特征输入。通过权重和偏置与隐藏层相连。
隐藏层:通过权重和偏置形成隐藏层,隐藏层通过激活函数得到输出。
输出层:隐藏层的输出通过另一个激活函数得到分类概率。
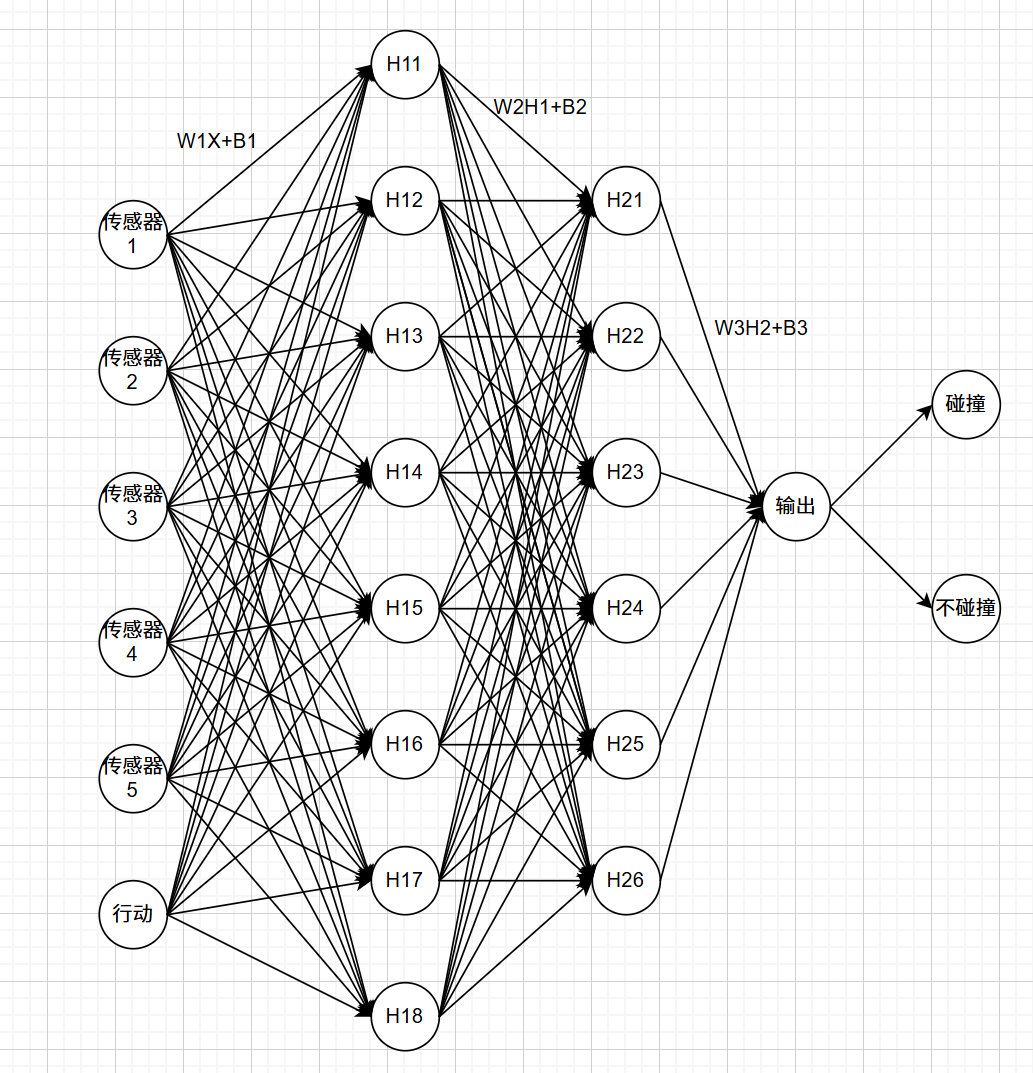
公式:
(1).输入==》第一隐藏层

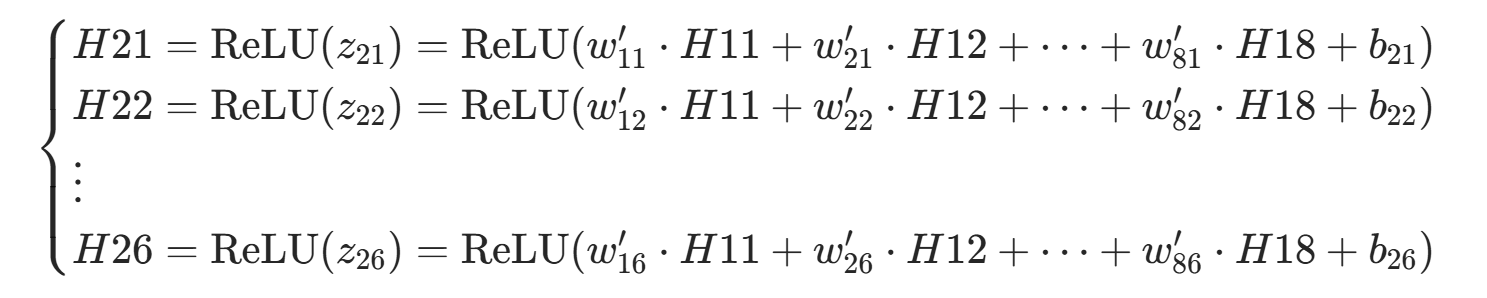
(2).第一隐藏层==》第二隐藏层
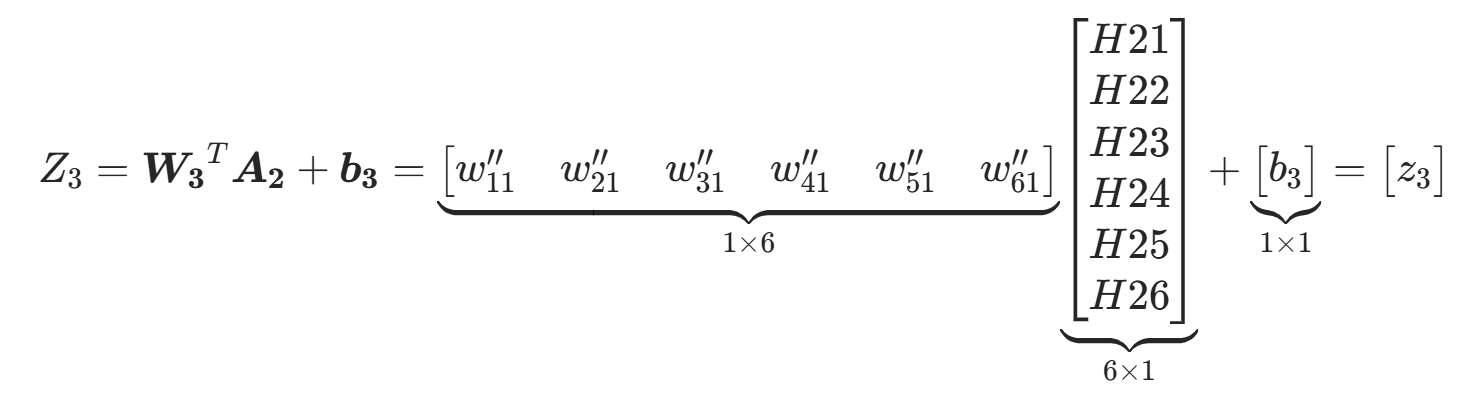
(3).第二隐藏层==》输出

(4).损失计算
BCELOSS:
MSELOSS:
二分类使用BCELOSS损失函数,MSELOSS函数适用回归任务。
举个例子:
假设在发生碰撞时(y=1),单次传播模型预估的碰撞概率为y^=0.8。
loss_sample=-(1*ln(0.8)+(1-1)*log(1-0.8))=0.22
假设在未发生碰撞时(y=0),单次传播模型预估的碰撞概率为y^=0.08。
loss_sample=-(0*ln(0.08)+(1-0)*log(1-0.08))=0.08
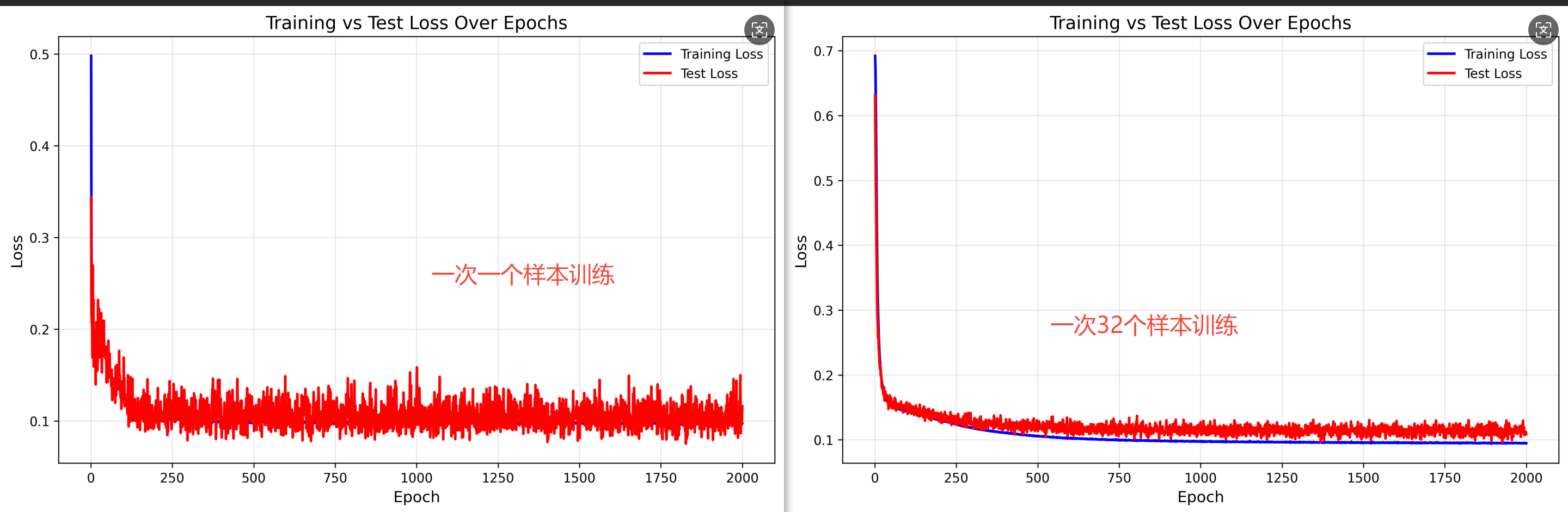
5. 训练
训练轮次通常根据经验判断。根据试错得出在800个训练轮次时会趋于稳定。通常选用32组样本作为一个训练批次,前向传播会得到32个碰撞预测结果。反向传播时,会先计算32组样本的损失以及反向传播梯度,然后各取平均,得到这一个批次的平均损失和平均反向传播梯度。最后使用 Adam 优化器,基于平均梯度对隐藏层 / 输出层权重进行统一更新,这样并行计算32组样本,可以大大减少训练时间,避免梯度震荡。
对于过拟合问题,通常使用正则化和丢弃法来规避,下面是基于碰撞预测项目,对正则化,丢弃法效果对预测效果的对比:
| 实验组合 | 最佳 F1 分数(综合过检漏检) |
| 无丢弃无正则 | 0.8631 |
| 无丢弃有正则 | 0.8943 |
| 有丢弃无正则 | 0.8959 |
| 有丢弃有正则 | 0.9055 |
综合来看,增加丢弃、正则措施确实会提升模型的泛化能力。
6. 训练结果
隐藏层层数结果对比:
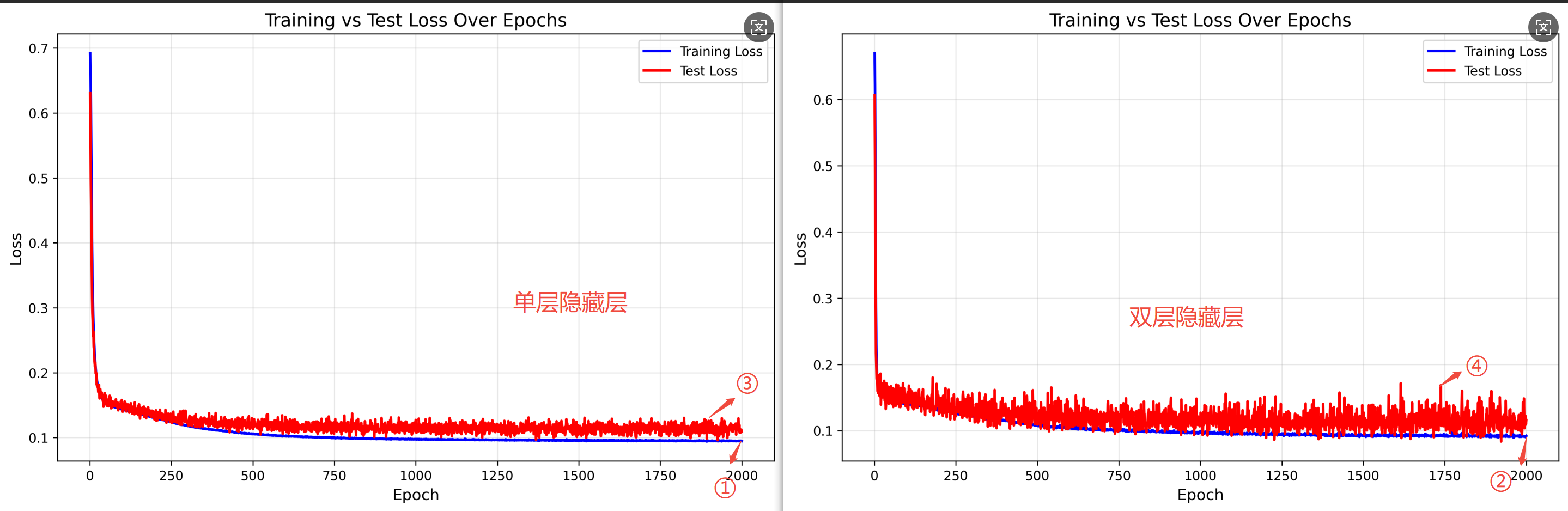
①vs②:双层隐藏层的训练损失更低。
③vs④:双层隐藏层的测试损失波动更大,泛化能力更弱。
一层隐藏层训练四次结果:
{"fractionalScore": 0.780000, "feedback": "False Positives: 20/1000 Missed Collisions 4/1000"}
{"fractionalScore": 0.970000, "feedback": "False Positives: 4/1000 Missed Collisions 1/1000"}
{"fractionalScore": 0.970000, "feedback": "False Positives: 9/1000 Missed Collisions 1/1000"}
{"fractionalScore": 0.940000, "feedback": "False Positives: 9/1000 Missed Collisions 2/1000"}
两层隐藏层训练四次结果:
{"fractionalScore": 0.930000, "feedback": "False Positives: 17/1000 Missed Collisions 0/1000"}
{"fractionalScore": 1.000000, "feedback": "False Positives: 7/1000 Missed Collisions 0/1000"}
{"fractionalScore": 0.930000, "feedback": "False Positives: 11/1000 Missed Collisions 2/1000"}
{"fractionalScore": 0.800000, "feedback": "False Positives: 21/1000 Missed Collisions 3/1000"}

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐

 10
10 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)