某雷赛86闭环步进驱动方案 HBS86H 86闭环电机驱动器/混合伺服驱动器。 原理图+PCB...
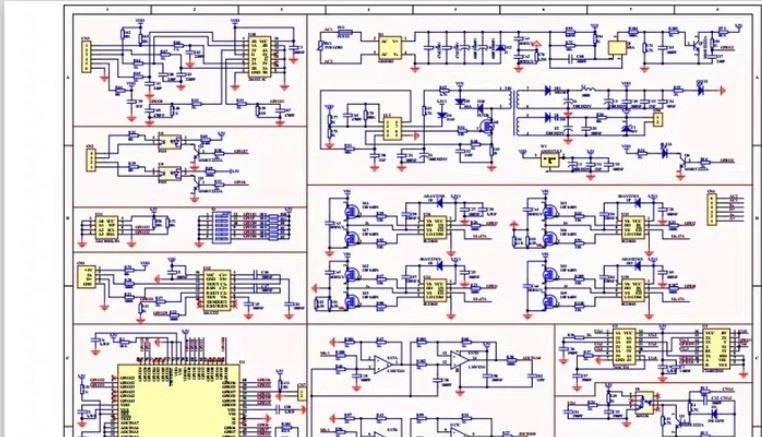
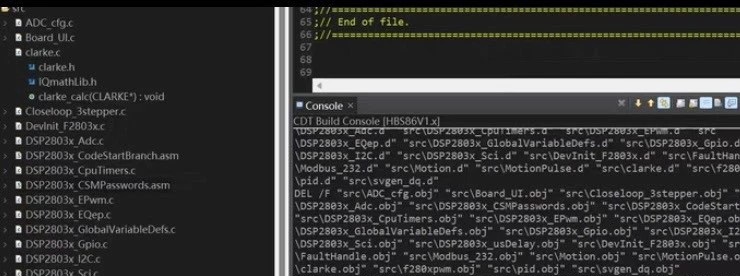
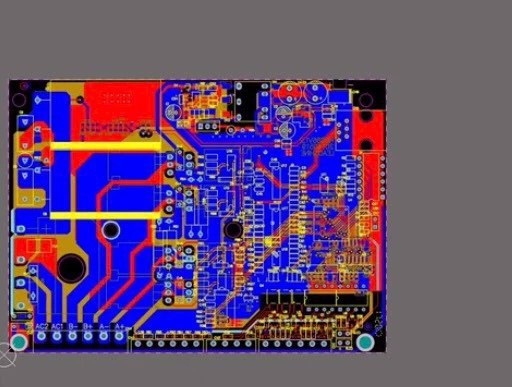
雷赛HBS86闭环步进驱动方案基于TI的DSP2803x系列芯片构建,该方案整合了原理图、PCB设计以及配套代码,形成一套完整的混合伺服驱动器解决方案。代码部分以C语言为开发语言,基于Eclipse CDT开发环境(从.metadata相关文件可判断),核心围绕DSP2803x芯片的各类外设展开,实现闭环步进电机的精准控制,涵盖电机驱动信号生成、位置与速度检测、电流采样与保护、通信交互等关键功能,
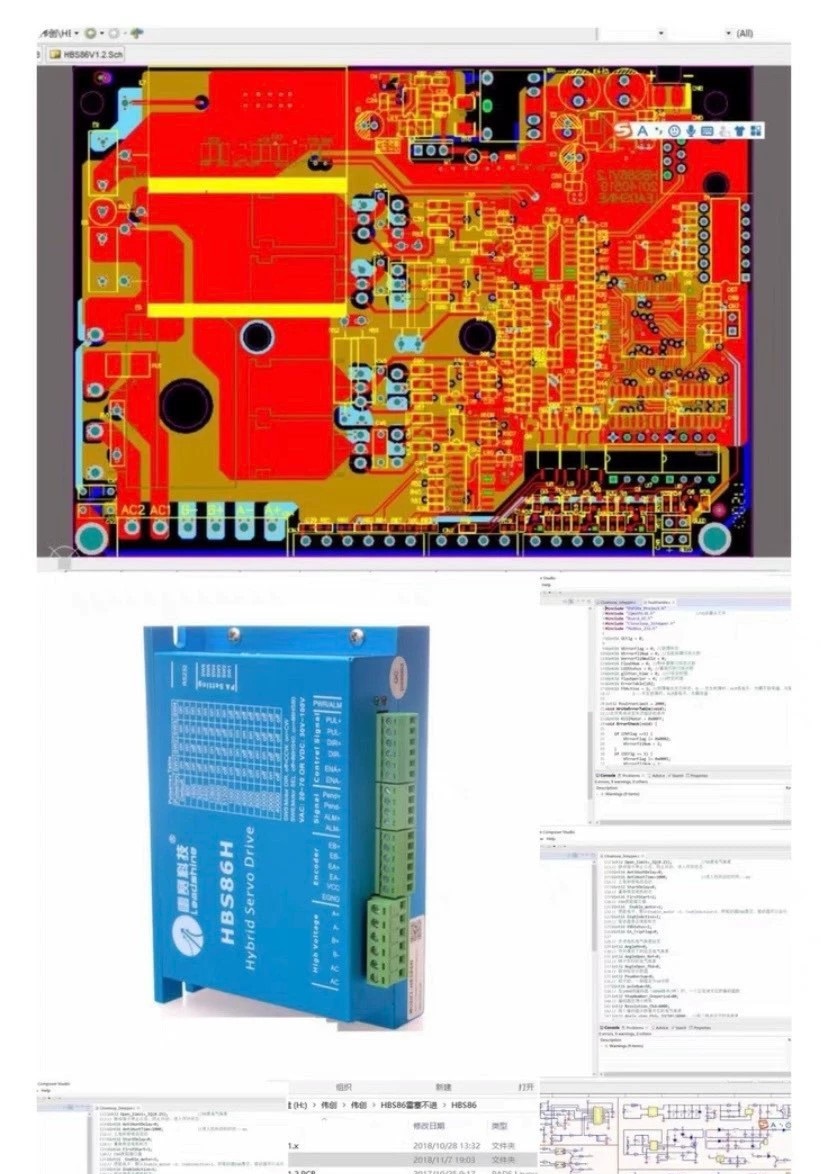
某雷赛86闭环步进驱动方案 HBS86H 86闭环电机驱动器/混合伺服驱动器。 原理图+PCB+代码。 整体方案打包。 代码无错误无警告。
一、方案概述
雷赛HBS86闭环步进驱动方案基于TI的DSP2803x系列芯片构建,该方案整合了原理图、PCB设计以及配套代码,形成一套完整的混合伺服驱动器解决方案。代码部分以C语言为开发语言,基于Eclipse CDT开发环境(从.metadata相关文件可判断),核心围绕DSP2803x芯片的各类外设展开,实现闭环步进电机的精准控制,涵盖电机驱动信号生成、位置与速度检测、电流采样与保护、通信交互等关键功能,适用于对精度和稳定性要求较高的步进驱动场景,如自动化设备、数控机床、机器人等领域。
二、核心功能模块解析
(一)外设初始化模块
外设初始化是整个驱动方案的基础,该模块通过一系列初始化函数,完成DSP2803x芯片各类外设的配置,为后续电机控制功能提供硬件支持。
- 系统控制初始化(SysCtrl)
- 功能:完成芯片核心时钟配置、电源管理以及外设时钟使能。代码中通过InitSysCtrl()函数实现,根据DSP2803x_Examples.h中的配置,将CPU时钟(SYSCLKOUT)设定为60MHz(通过PLLCR=12、DIVSEL=2实现,计算公式为10MHz*12/2=60MHz),同时使能EPWM、EQEP、ADC、SCI等与电机控制相关外设的时钟信号,确保外设正常工作。
- 意义:稳定的时钟信号是外设同步工作的关键,60MHz的时钟频率能够满足闭环控制中高频信号采样与处理的需求,为电机精准控制提供时间基准。 - GPIO初始化(Gpio)
- 功能:通过InitGpio()以及各类外设GPIO初始化函数(如InitEPwmGpio()、InitEQepGpio()),配置芯片引脚的功能模式、方向以及电气属性(如拉取使能)。例如,将特定引脚配置为EPWM输出引脚以生成电机驱动脉冲,将部分引脚配置为EQEP输入引脚以接收编码器信号,将模拟输入引脚配置为ADC采样引脚以采集电流信号。
- 意义:合理的GPIO配置实现了芯片与外部硬件(如电机驱动电路、编码器、电流采样电路)的正确连接,是外设与外部设备进行信号交互的前提。 - 中断控制器初始化(PieCtrl与PieVect)
- 功能:InitPieCtrl()函数用于初始化PIE(Peripheral Interrupt Expansion)控制器,使能PIE模块并清除各类中断标志;InitPieVectTable()函数则初始化PIE中断向量表,将各个外设的中断服务函数(ISR)与对应的中断向量关联。例如,将ADC中断服务函数ADCINT1ISR()、EPWM中断服务函数EPWM1INT_ISR()等映射到相应的中断向量位置。
- 意义:中断机制是实时控制系统的核心,通过初始化中断控制器与向量表,确保外设事件(如ADC采样完成、EPWM周期结束)能够及时触发中断,CPU可快速响应并处理,保障电机控制的实时性。
(二)电机驱动控制模块
电机驱动控制模块是方案的核心,基于EPWM(增强型脉冲宽度调制)外设实现,通过生成精准的PWM信号,控制步进电机的运行状态,包括速度、方向以及输出扭矩。
- EPWM配置
- 功能:通过InitEPwm()函数配置EPWM外设的核心参数。在DSP2803xEPwm.h与DSP2803xEPwm_defines.h中,定义了EPWM的时基控制(TBCTL)、比较控制(CMPCTL)、动作限定(AQCTL)等寄存器结构与配置宏。代码中会设置EPWM的计数模式(如增计数、增减计数)、周期(TBPRD)、比较值(CMPA、CMPB)以及PWM输出动作(如计数器等于0时置高、等于比较值时置低)。例如,采用增减计数模式,通过调整TBPRD值控制PWM周期(进而控制电机转速),通过修改CMPA值调整PWM占空比(进而控制电机输出扭矩相关的电流)。
- 意义:EPWM信号是驱动步进电机的直接控制信号,精准的PWM参数配置能够实现电机的平稳运行,避免电机丢步、振动等问题,同时为闭环控制中的实时调整提供灵活的控制接口。 - 死区控制
- 功能:在H桥驱动电路中,为防止上下桥臂功率器件同时导通造成短路,代码通过EPWM的死区生成器(DBCTL、DBRED、DBFED)配置死区时间。通过设置DBRED(上升沿死区)与DBFED(下降沿死区)寄存器的值,在PWM信号的上升沿和下降沿插入一段延迟时间,确保上下桥臂器件不会同时导通。
- 意义:死区控制是保障功率电路安全运行的关键,有效避免了功率器件损坏,提高了驱动方案的可靠性。
(三)位置与速度检测模块
该模块基于EQEP(增强型正交编码器脉冲)外设实现,通过采集电机配套编码器的信号,获取电机的实时位置与速度信息,为闭环控制提供反馈。
- EQEP配置
- 功能:InitEQep()函数用于配置EQEP外设。在DSP2803x_EQep.h中,定义了EQEP的位置计数器(QPOSCNT)、最大位置(QPOSMAX)、索引位置(QPOSILAT)等寄存器结构。代码中会配置编码器信号的极性(QDECCTL中的QAP、QBP位)、计数模式(如正交解码模式)以及位置比较功能(QPOSCTL)。例如,通过QDECCTL寄存器配置编码器A、B相信号的极性,确保计数器能够正确反映电机的转动方向;通过QPOSMAX设置位置计数器的最大计数值,实现位置的循环计数或溢出保护。
- 意义:EQEP外设的配置确保了编码器信号能够被正确解码,位置计数器的数值准确反映电机的实际位置,为闭环控制中的位置反馈与校正提供基础数据。 - 速度计算
- 功能:代码通过EQEP的捕获功能(QCAPCTL、QCTMR、QCPRD)或软件定时采样的方式计算电机速度。例如,在定时中断服务函数中,读取EQEP位置计数器在固定时间间隔内的变化量,结合电机的减速比与编码器线数,计算出电机的实时转速(单位:rpm或rad/s)。若采用EQEP的硬件捕获功能,可通过捕获单位时间内的脉冲数,直接计算速度,减少软件计算量。
- 意义:实时准确的速度信息是速度闭环控制的前提,通过速度计算,CPU可根据目标速度与实际速度的偏差,调整EPWM的输出参数,实现电机速度的稳定控制。
(四)电流采样与保护模块
电流采样与保护模块基于ADC(模数转换器)外设实现,通过采集电机绕组的电流信号,实现电流闭环控制与过流保护,保障电机与驱动电路的安全运行。
- ADC配置
- 功能:InitAdc()与InitAdcAio()函数用于配置ADC外设与模拟输入引脚。在DSP2803xAdc.h中,定义了ADC的控制寄存器(ADCCTL1、ADCCTL2)、中断选择寄存器(INTSEL1N2)、结果寄存器(ADCRESULT)等结构。代码中会配置ADC的参考电压(内部/外部)、采样时钟分频、采样通道(如采集电机A、B相电流的通道)以及中断触发方式(如每次采样完成触发中断)。例如,选择内部参考电压,配置采样时钟分频系数确保采样精度,将ADC通道0、1配置为电流采样通道,并使能ADCINT1中断,当采样完成后触发ADCINT1ISR()函数读取采样结果。
- 意义:电流采样是实现电流闭环控制与过流保护的基础,通过ADC将模拟电流信号转换为数字信号,为后续的电流控制与保护逻辑提供数据支持。 - 电流闭环与过流保护
- 功能:在ADC中断服务函数中,读取ADCRESULT寄存器中的电流采样值,与目标电流值进行比较,通过PID(比例-积分-微分)控制算法计算出电流偏差调整量,进而修改EPWM的比较值(CMPA/CMPB),调整PWM占空比,实现电流闭环控制,确保电机绕组电流稳定在目标值附近,避免电流过大或过小导致电机性能下降。同时,代码会判断采样电流值是否超过预设的过流阈值,若超过则触发保护逻辑,如立即停止EPWM输出、置位故障标志并上报故障信息。
- 意义:电流闭环控制能够提高电机的输出扭矩稳定性与动态响应性能,而过流保护则是保障电机与驱动电路安全的关键,防止因负载过大、短路等故障导致设备损坏。
(五)通信交互模块
通信交互模块支持多种通信接口,如SCI(串行通信接口)、LIN(本地互联网络),实现驱动器与上位机或其他设备的数据交互,包括参数配置、状态上报等功能。
- SCI配置
- 功能:InitSci()与InitSciGpio()函数用于配置SCI外设与通信引脚。在DSP2803xSci.h中,定义了SCI的控制寄存器(SCICTL1、SCICTL2)、数据寄存器(SCIRXBUF、SCITXBUF)、波特率寄存器(SCIHBAUD、SCILBAUD)等结构。代码中会配置SCI的波特率(如9600bps、115200bps)、数据位长度(如8位)、停止位(如1位)以及校验位(如无校验),并使能SCI的接收与发送中断。例如,通过SCIHBAUD与SCILBAUD寄存器配置波特率,使能SCIRXINT中断,当接收到上位机发送的数据时,触发SCIRXINTAISR()函数读取接收数据并解析。
- 意义:SCI通信是驱动器与上位机交互的常用方式,通过SCI接口,上位机可向驱动器发送控制指令(如目标位置、目标速度),驱动器可向上位机上报运行状态(如当前位置、电流、故障信息),实现驱动器的远程控制与监控。 - 数据解析与处理
- 功能:代码中会实现一套通信协议,定义数据帧的格式(如起始位、地址位、数据位、校验位、停止位)。在SCI接收中断服务函数中,按照协议解析接收到的数据帧,判断数据类型(如参数配置、控制指令),并执行相应操作。例如,若解析到上位机发送的目标位置指令,则更新目标位置变量,并在位置闭环控制逻辑中使用;若解析到参数查询指令,则将当前的电机参数(如速度、电流)按照协议格式打包,通过SCI发送缓冲区(SCITXBUF)发送给上位机。
- 意义:标准化的通信协议与数据处理逻辑确保了驱动器与上位机通信的可靠性与准确性,实现了驱动器的可配置性与可监控性,便于系统集成与调试。
三、闭环控制流程
雷赛HBS86方案的闭环控制是一个多模块协同工作的过程,以位置闭环控制为例,具体流程如下:
- 目标指令接收:上位机通过SCI接口发送目标位置指令,SCI接收中断服务函数解析指令,将目标位置值存储到全局变量
targetPosition中。 - 位置反馈采集:EQEP外设实时解码编码器信号,更新位置计数器
QPOSCNT的值。在定时中断(如CPU Timer0中断)服务函数中,读取QPOSCNT的值,得到电机当前位置currentPosition,并结合电机减速比、编码器线数进行单位转换(如转换为实际角度或距离)。 - 位置偏差计算:将
targetPosition与currentPosition进行比较,计算位置偏差positionError = targetPosition - currentPosition。 - 速度指令生成:根据位置偏差,通过位置环PID控制器计算出目标速度
targetSpeed。若位置偏差较大,则输出较大的目标速度,加快电机响应;若位置偏差较小,则输出较小的目标速度,避免超调。 - 速度反馈采集:在定时中断服务函数中,根据EQEP位置计数器在固定时间间隔内的变化量,计算电机当前速度
currentSpeed。 - 速度偏差计算与电流指令生成:将
targetSpeed与currentSpeed进行比较,计算速度偏差speedError = targetSpeed - currentSpeed,通过速度环PID控制器计算出目标电流targetCurrent。 - 电流闭环控制:ADC外设实时采集电机绕组电流,在ADC中断服务函数中得到当前电流
currentCurrent,与targetCurrent比较,通过电流环PID控制器计算出PWM占空比调整量,修改EPWM的比较值CMPA,调整PWM输出,进而控制电机电流,使电机按照目标速度运行,逐步消除位置偏差,最终实现目标位置控制。 - 故障检测与保护:在整个闭环控制过程中,代码会实时监测电流、电压、温度等关键参数,若检测到过流、过压、过热等故障,立即触发保护逻辑,停止电机运行,并通过SCI向上位机上报故障信息。
四、方案特点与优势
- 高可靠性:通过死区控制、过流保护、过热保护等多重保护机制,有效避免功率器件损坏与电机故障,保障驱动方案的长期稳定运行。
- 高精度控制:基于DSP2803x芯片的高性能外设(EPWM、EQEP、ADC)与多环闭环控制(位置环、速度环、电流环),实现电机的高精度位置与速度控制,减少丢步、超调等问题,满足高精度应用场景需求。
- 良好的扩展性:代码采用模块化设计,各个功能模块相对独立,便于后续功能扩展(如增加CAN通信接口、支持多种电机类型)与性能优化(如优化PID参数、改进控制算法)。
- 便捷的交互性:支持SCI、LIN等多种通信接口,便于与上位机或其他设备进行数据交互,实现驱动器的远程控制、参数配置与状态监控,降低系统集成与调试难度。
五、应用场景
雷赛HBS86闭环步进驱动方案凭借其高精度、高可靠性的特点,广泛应用于以下领域:
- 自动化设备:如自动化装配线、分拣设备中的传送带驱动、机械臂关节驱动,要求电机精准控制位置与速度,确保设备动作的准确性与协调性。
- 数控机床:如小型数控车床、铣床中的进给轴驱动,需要电机实现高精度的位置控制,保证加工精度。
- 机器人:如服务机器人、工业机器人的关节驱动,要求电机具有良好的动态响应与稳定性,实现机器人的灵活运动与精准定位。
- 医疗设备:如医疗影像设备(CT、MRI)中的运动平台驱动、手术机器人驱动,对电机控制的精度与可靠性要求极高,该方案能够满足医疗设备的严苛需求。
某雷赛86闭环步进驱动方案 HBS86H 86闭环电机驱动器/混合伺服驱动器。 原理图+PCB+代码。 整体方案打包。 代码无错误无警告。



DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐

 17
17 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)