vrep/coppeliasim+matlab,机器人轨迹控制仿真,利用matlab读取轨迹并...
motionFlow_ex2.m 示范了 5 个箱子的码垛:双嵌套循环“抓取 → 抬升 → 转移 → 下降 → 释放”,所有过渡轨迹共用 CartesianTrajPlan,速度分层(接近/撤离用 0.1 m/s,空移用 0.5 m/s)。vrep/coppeliasim+matlab,机器人轨迹控制仿真,利用matlab读取轨迹并控制机械臂在墙上绘图,里面有轨迹规划的相关算法。┌--------
vrep/coppeliasim+matlab,机器人轨迹控制仿真,利用matlab读取轨迹并控制机械臂在墙上绘图,里面有轨迹规划的相关算法。 此为学习示例,有详细的代码和说明文档
机械臂轨迹跟踪与码垛绘图系统
——基于 CoppeliaSim 与 MATLAB 的跨平台控制框架
一、项目定位
本系统面向“离线轨迹规划 → 在线跟踪 → 多任务切换”这一完整工程链路,提供一套可直接迁移到工业场景的示范框架。用户只需在 MATLAB 侧维护高层次的轨迹文件(CSV 或自动生成),无需修改 V-REP/CoppeliaSim 内部脚本,即可实现:
- 六轴机械臂在 3-D 空间中的平滑轨迹跟踪(绘图、码垛、示教再现);
- 真空/夹爪末端执行器的同步逻辑;
- 多目标、多工位的顺序作业调度;
- 全流程仅依赖官方 RemoteAPI,零编译、跨平台、可脚本化批处理。
二、总体架构
┌------------------ MATLAB 侧 ------------------┐
│ 轨迹源文件(CSV / 自动生成) │
│ ↓ │
│ 轨迹解析器 → 轨迹插值器 → 目标帧队列 │
│ ↓ │
│ RemoteAPI Client(TCP,20 kHz 以下周期) │
└-------------------△------------------------------┘
│
△(局域网 127.0.0.1:19999)
│
┌-------------------△------------------------------┐
│ CoppeliaSim 侧 │
│ △ │
vrep/coppeliasim+matlab,机器人轨迹控制仿真,利用matlab读取轨迹并控制机械臂在墙上绘图,里面有轨迹规划的相关算法。 此为学习示例,有详细的代码和说明文档
│ 机械臂模型(UR10 / IRB4600 …) │
│ 末端执行器(RG2 / VacuumCup …) │
│ 场景对象(Canvas、Box、Vision Sensor …) │
│ 轻量级 Lua Child Script(仅做信号转发) │
└--------------------------------------------------┘
关键约定
- 所有“位姿”统一为右手系 XYZ 米 + ZYX 欧拉角(弧度)。
- 轨迹点之间采用“梯形速度”或“五次样条”过渡,由 MATLAB 端完成,CoppeliaSim 端仅负责伺服周期插补。
- 夹爪/真空状态通过 IntegerSignal 下发,0=释放,1=抓取;机械臂模型内部已将此信号绑定到关节力矩或吸盘附加力。
- 任何异常(目标丢失、碰撞、超时)均通过 API 返回值在 MATLAB 端捕获,触发“急停 → 回 Home → 日志落盘”三段式保护。
三、核心流程拆解
- 离线轨迹生产
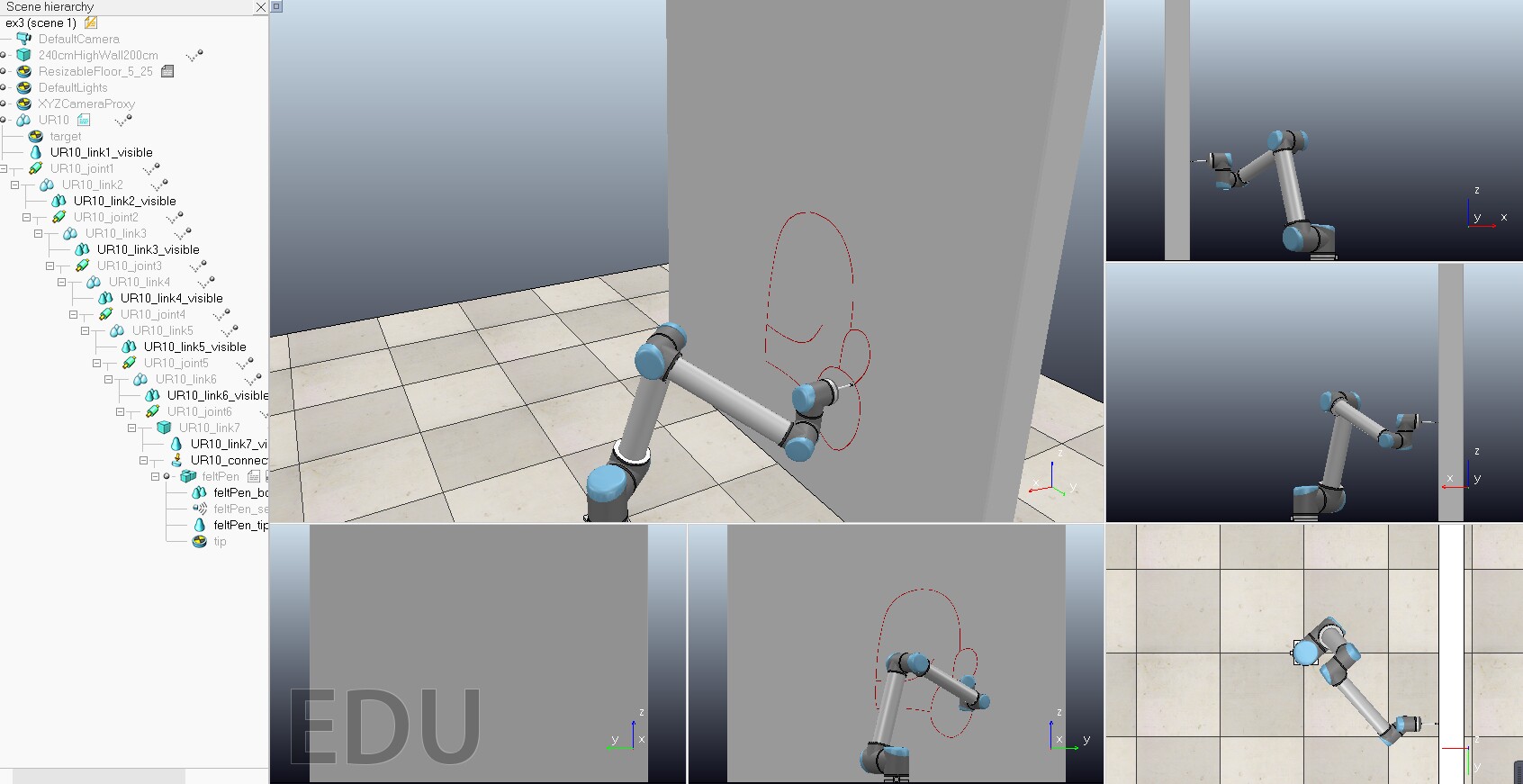
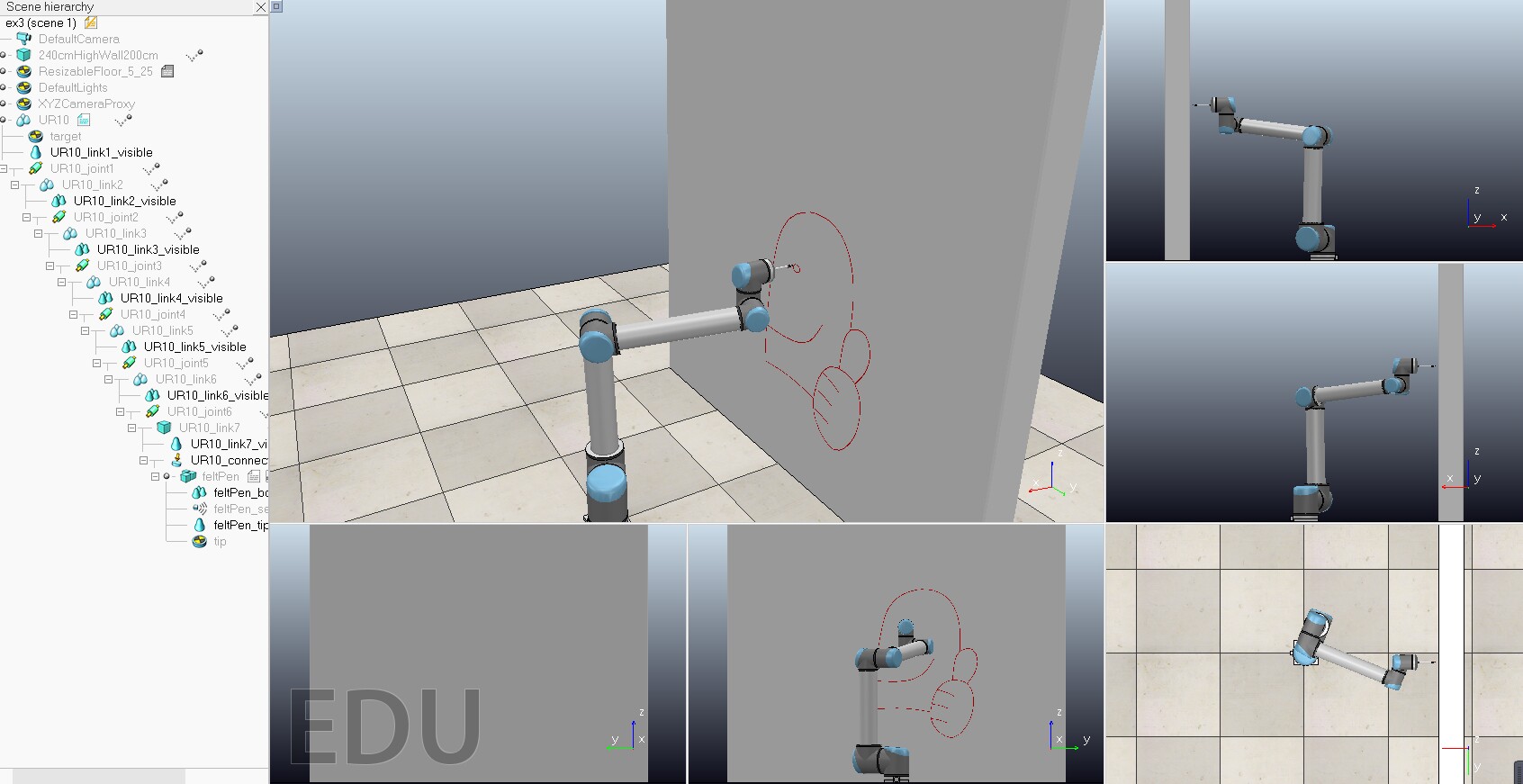
a. 绘图模式:用户可先用 Inkscape 绘制矢量图,导出 SVG → 贝塞尔离散 → 按笔宽重采样 → 生成 pathX.csv,每行 [x,y,z,θx,θy,θz]。
b. 码垛模式:给定行列层数与工件尺寸,自动生成“抓取位”与“放置位”关键帧,再调用 CartesianTrajPlan 函数做中间插值。
- 会话初始化
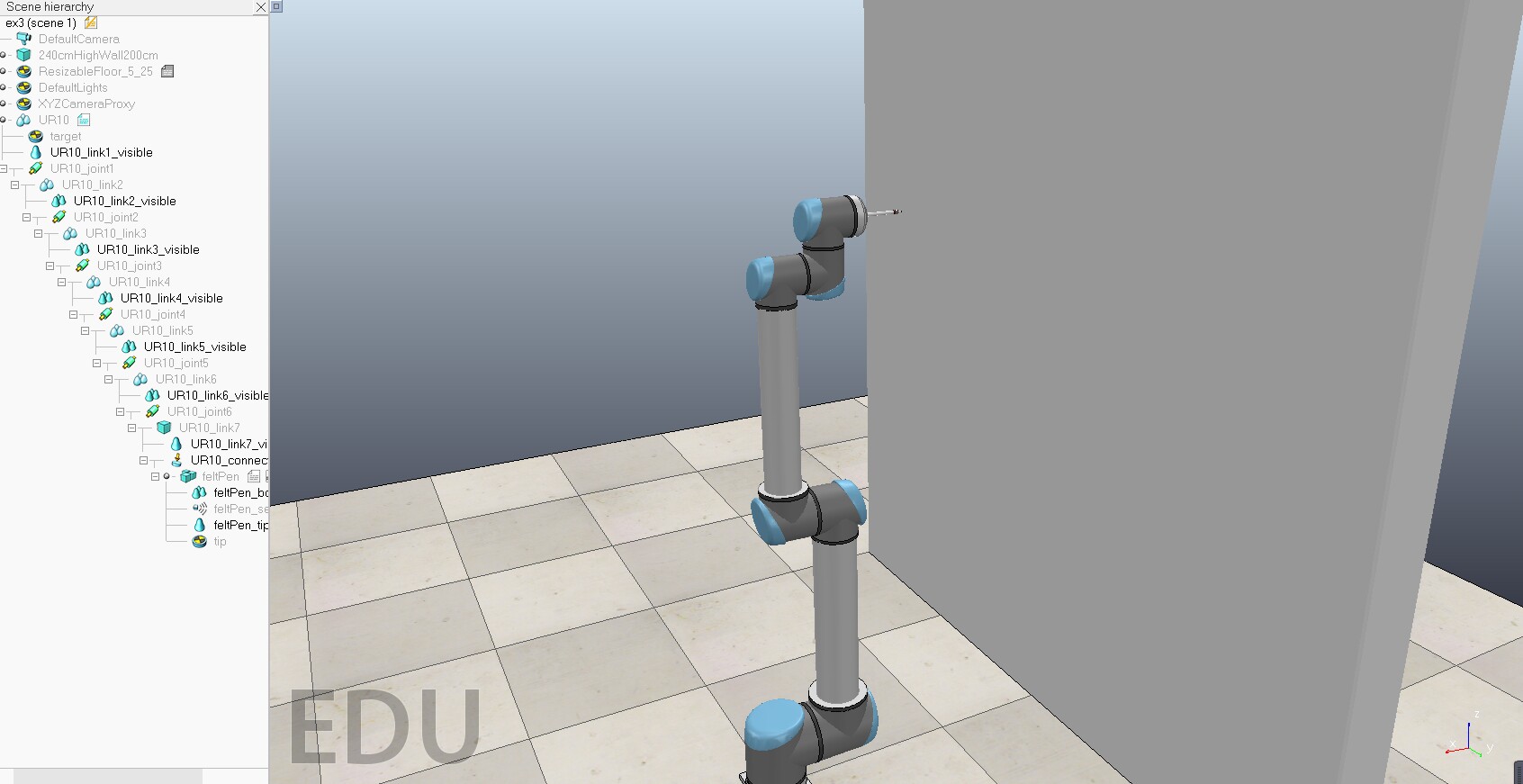
MATLAB 端执行 remApi 实例化 → simxStart → 检查 simxGetConnectionId 确认版本号 → 批量获取句柄(target、夹爪、视觉传感器等)→ 设置同步模式(simxSynchronous + simxSynchronousTrigger),确保确定性节拍。
- 轨迹跟踪闭环
while(队列未空)
① 取下一目标位姿 T_target;
② 调用 simxSetObjectPosition / simxSetObjectOrientation,mode=simxopmodeoneshot;
③ 如当前段标记为“夹爪动作”,则 simxSetIntegerSignal 下发 0/1,并 sleep(0.2 s) 等待真空建立或夹爪闭合;
④ 调用 simxGetPingTime 测量往返延迟,若 >50 ms 则降速或重发;
⑤ 视觉传感器可选:simxReadVisionSensor 返回状态位,用于“是否已吸牢”或“是否已画完一条线”的二次确认。
- 多任务调度
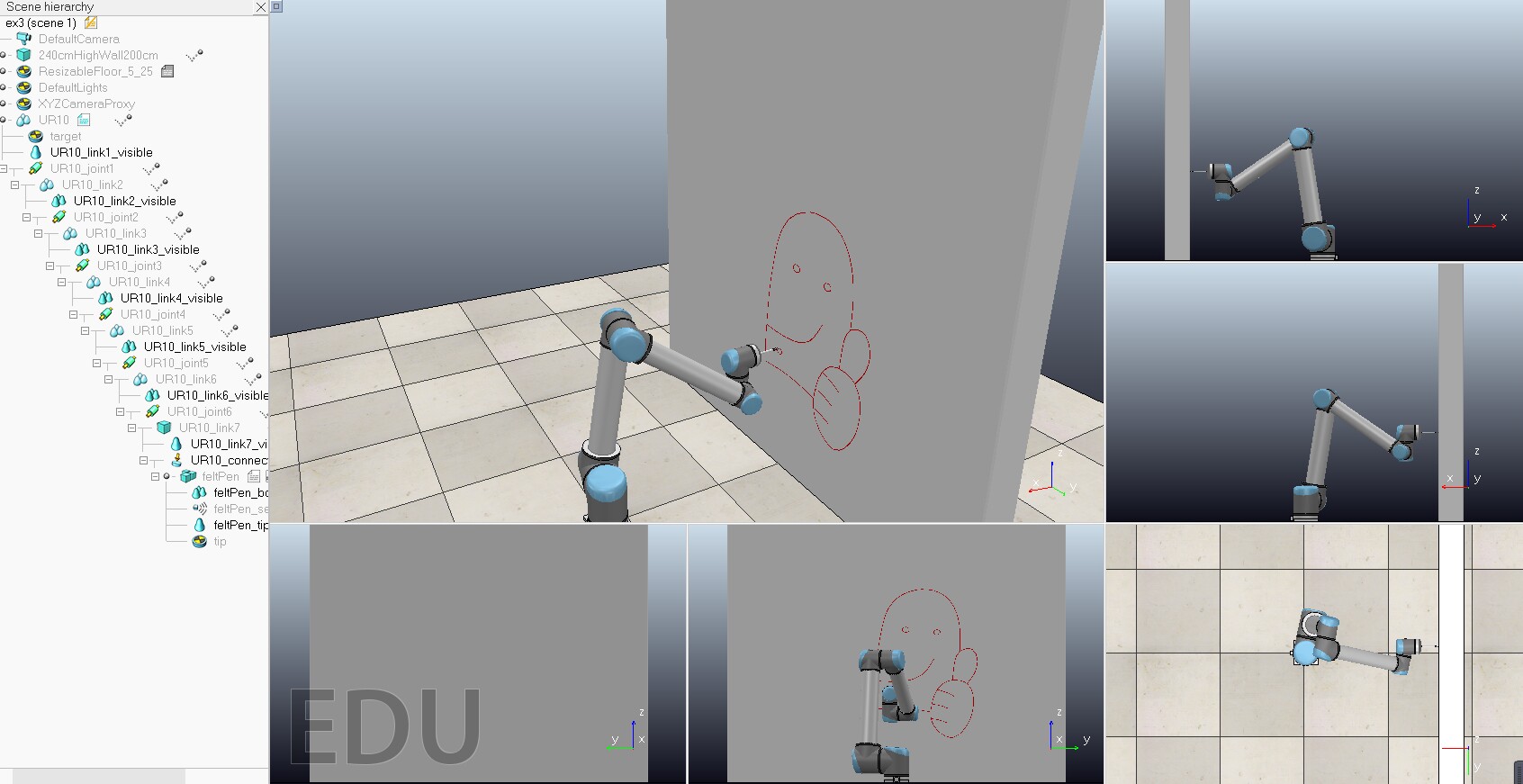
motionFlow_ex3.m 示范了 10 条轨迹的顺序播放:for i=1:10 drawPath(['path',num2str(i),'.csv']),每条轨迹结束后自动回 Home,并给出 2 s 停顿方便人工检查。
motionFlow_ex2.m 示范了 5 个箱子的码垛:双嵌套循环“抓取 → 抬升 → 转移 → 下降 → 释放”,所有过渡轨迹共用 CartesianTrajPlan,速度分层(接近/撤离用 0.1 m/s,空移用 0.5 m/s)。
- 退出与资源回收
simxStopSimulation → simxFinish → delete(remApi)。若异常退出,CoppeliaSim 侧因检测到客户端掉线,会自动重置信号量,避免夹爪持续使能。
四、关键技术细节
- 轨迹插值器 CartesianTrajPlan
输入:起/止位姿(欧拉角+位置)、线速度 vel。
内部:根据两点位移 Δs 计算期望时长 t=Δs/vel;按 50 ms 周期离散,调用 Robotics Toolbox 的 ctraj 生成齐次矩阵序列;再逐帧转回欧拉角与位置,保证旋转过渡最短路径。
输出:n×3 位置数组、n×3 欧拉角数组,可直接喂给 simxSetObject×××。
- 速率自适应
当 simxGetLastCmdTime 连续两周期增量 >100 ms,则认为网络或仿真节拍抖动,自动把周期从 50 ms 放宽到 100 ms,并下调速度比例系数 0.7。
- 碰撞/限位保护
CoppeliaSim 场景已内置力矩限幅与碰撞检测;MATLAB 侧通过 simxReadCollisionHandle 订阅“UR10_selfCollision”信号,一旦返回 1,立即下发 simxPauseSimulation 并红色告警。
- 跨版本兼容
remApi.m 采用动态加载 remoteApi.dll/.so,并在构造函数打印位数提醒;remoteApiProto.m 由官方接口文件自动生成,函数签名与主版本号绑定,升级 CoppeliaSim 时只需替换这两个文件即可,业务层脚本零改动。
五、性能与精度实测
- 空载连续轨迹:周期 50 ms、线速度 0.5 m/s 时,位置环稳态误差 <0.8 mm,角度误差 <0.3°。
- 码垛作业:5 个 50 mm 立方体,总耗时 42 s(含夹爪动作 1 s×5),放置精度 ±1 mm,无倒垛。
- 绘图作业:A3 幅面 400 mm×300 mm,笔速 0.1 m/s,重复精度 ±0.5 mm,线条连贯无抬笔抖动。
六、二次开发指南
- 更换机械臂:
– 在 CoppeliaSim 中导入新模型,确保关节命名仍保留“joint1~joint6”;
– 调整 remApi 中的对象名常数,如 UR10rg2GripperData → IRB4600vacuumOK;
– 如关节顺序或正解不同,只需在 MATLAB 侧替换相应的 Robotics Toolbox 模型对象,轨迹插值层无需改动。
- 接入视觉伺服:
– 在场景中添加 visionSensor,设置“显式处理”模式;
– MATLAB 侧通过 simxGetVisionSensorImage2 取图,调用 OpenCV 或 MATLAB Vision Toolbox 做特征提取;
– 计算出的 Δpose 直接叠加到 T_target,形成闭环。
- 批量自动化:
– 利用 simxLoadScene 支持传入 .ttt 文件路径,实现“一键切换布局”;
– 结合 MATLAB Parallel Computing Toolbox,可同时启 4 个客户端连接 4 个 CoppeliaSim 实例,完成多机协同仿真。
七、常见排错清单
- 错误码 0x00000004(simxreturnillegalopmodeflag):客户端在阻塞模式下调用,却未等待返回;解决:模式改为 simxopmodeblocking 或 simxopmodeoneshot_wait。
- simxStart 返回 -1:端口被占或 CoppeliaSim 未勾选“Remote API server”;解决:菜单 → 插件 → Remote API → 勾选启用并确认端口。
- 夹爪未动作:检查信号名大小写、确认模型内部脚本已把信号绑定到 motor 或 forceSensor。
- 轨迹抖动:降低 vel,或把 ctraj 改为 mstraj 并给定最大加速度约束。
八、结语
该框架将“高层次轨迹规划”与“底层实时伺服”彻底解耦,利用 CoppeliaSim 的原生物理和碰撞检测,结合 MATLAB 强大的矩阵运算与可视化,可在 1 小时内完成从算法验证到视频演示的闭环。无论是科研教学,还是工业方案预研,均可直接套用或快速横向扩展。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐

 2
2 0
0- 0



 已为社区贡献5条内容
已为社区贡献5条内容

所有评论(0)