发那科 FANUC 涂胶机器人全解析:从应用程序到操作手册
发那科FANUC涂胶机器人应用程序及电气图1.发那科FANUC涂胶机器人应用程序2.机器人线路硬件电气图3.VD布局图4.涂胶机操作维护手册在工业自动化的浪潮中,发那科 FANUC 涂胶机器人凭借其高效、精准的特性,成为众多制造企业的得力助手。今天咱们就深入探讨一下它的应用程序、电气图、VD 布局图以及操作维护手册等内容。
发那科FANUC涂胶机器人应用程序及电气图1.发那科FANUC涂胶机器人应用程序 2.机器人线路硬件电气图 3.VD布局图 4.涂胶机操作维护手册
在工业自动化的浪潮中,发那科 FANUC 涂胶机器人凭借其高效、精准的特性,成为众多制造企业的得力助手。今天咱们就深入探讨一下它的应用程序、电气图、VD 布局图以及操作维护手册等内容。
发那科 FANUC 涂胶机器人应用程序
发那科 FANUC 涂胶机器人的应用程序可是整个系统的“大脑”,它决定了机器人的动作逻辑和涂胶效果。下面是一段简单的发那科机器人程序示例(这里使用发那科 Karel 语言):
PROGRAM ExampleGlueProgram
VAR
Pos1: POSITION;
Pos2: POSITION;
BEGIN
// 定义两个位置
Pos1 = [100, 200, 300, 0, 0, 0];
Pos2 = [400, 500, 600, 0, 0, 0];
// 移动到第一个位置
MOVJ Pos1, 100%;
// 开始涂胶
OUTPUT(1) = TRUE;
// 直线移动到第二个位置
MOVL Pos2, 50%;
// 停止涂胶
OUTPUT(1) = FALSE;
END ExampleGlueProgram;代码分析:在这段代码里,我们首先定义了两个变量 Pos1 和 Pos2 来表示机器人要到达的位置。MOVJ 指令是让机器人以关节运动的方式快速移动到 Pos1 位置,速度设定为 100%。当机器人到达 Pos1 后,通过 OUTPUT(1) = TRUE 开启涂胶功能,这里的 OUTPUT(1) 可以理解为控制涂胶阀的输出信号。接着使用 MOVL 指令让机器人以直线运动的方式移动到 Pos2 位置,速度为 50%,这样可以保证涂胶过程的平稳。最后,OUTPUT(1) = FALSE 关闭涂胶功能。
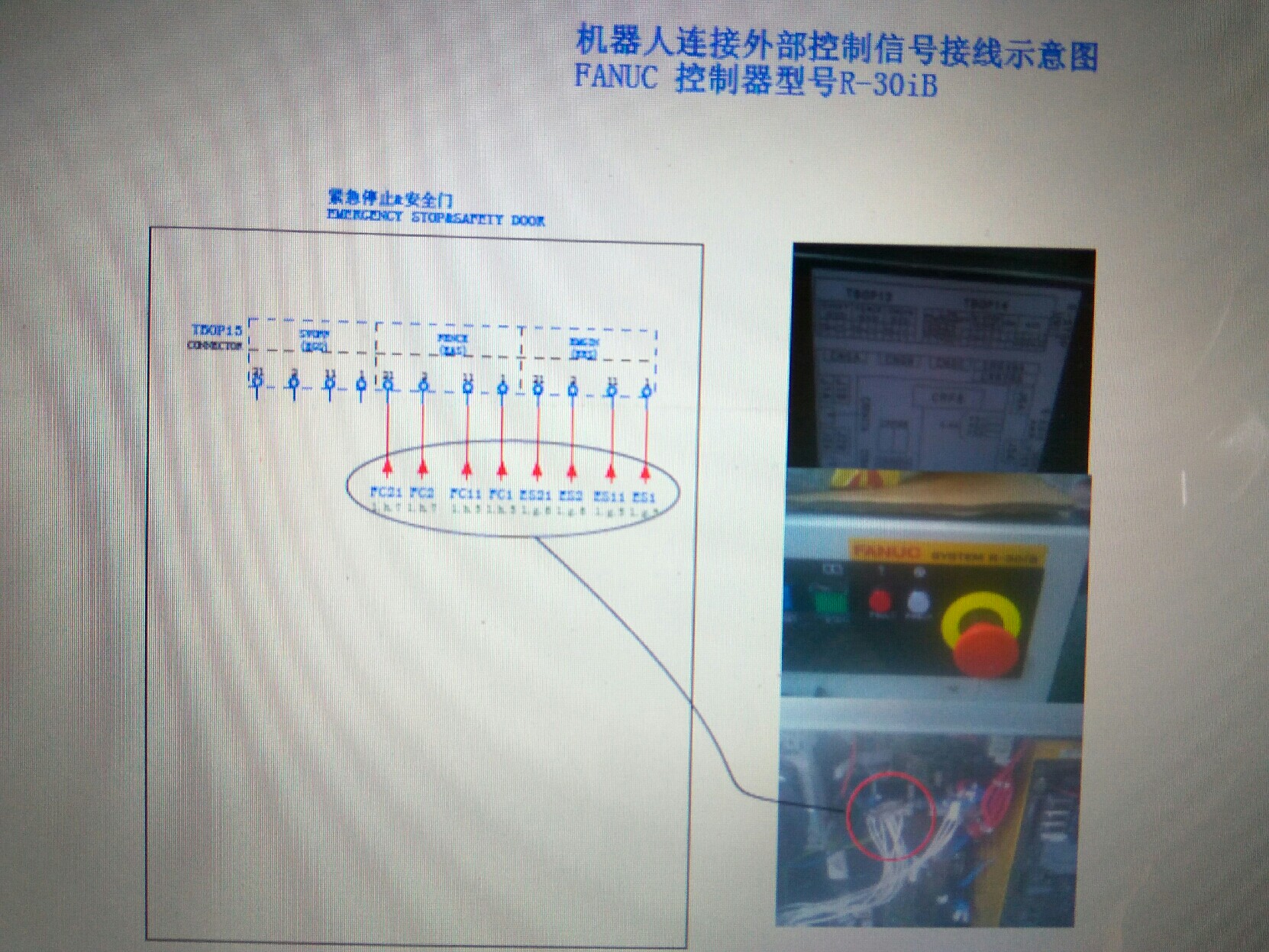
机器人线路硬件电气图
机器人线路硬件电气图就像是机器人的“血管”和“神经”分布图,它展示了各个电气部件之间的连接关系。通过电气图,我们可以清晰地看到电源、控制器、传感器、执行器等部件是如何相互连接的。比如,涂胶阀与控制器之间的连接线路,在电气图中会明确标注出电线的型号、颜色和连接端口。如果在调试过程中发现涂胶阀无法正常工作,我们就可以根据电气图检查线路是否连接正确,是否存在短路或断路的情况。
VD 布局图
VD 布局图主要用于规划机器人工作区域内的各种设备和传感器的位置。它可以帮助我们合理安排机器人的运动路径,避免与其他设备发生碰撞。例如,在一个涂胶工作站中,除了机器人和涂胶机外,可能还会有工件输送线、视觉传感器等设备。通过 VD 布局图,我们可以确定这些设备的最佳安装位置,使得机器人能够高效地完成涂胶任务。同时,VD 布局图还可以标注出安全防护区域,保障操作人员的安全。
涂胶机操作维护手册
涂胶机操作维护手册是操作人员的“宝典”。它详细介绍了涂胶机的操作步骤、日常维护方法以及常见故障的排除。比如,在操作步骤中,会说明如何开机、如何设置涂胶参数(如涂胶速度、涂胶压力等)、如何关机等。在日常维护方面,会提到定期清洁涂胶阀、更换过滤器等内容。下面是一个简单的涂胶机日常维护检查清单示例(用 Python 实现):
# 涂胶机日常维护检查清单
check_list = [
"检查涂胶阀是否堵塞",
"检查过滤器是否需要更换",
"检查胶管是否有破损",
"检查涂胶压力是否正常"
]
for item in check_list:
print(f"请检查: {item}")代码分析:这段 Python 代码定义了一个包含涂胶机日常维护检查项目的列表 check_list,然后通过 for 循环遍历列表,将每个检查项目打印出来,方便操作人员对照检查。
发那科FANUC涂胶机器人应用程序及电气图1.发那科FANUC涂胶机器人应用程序 2.机器人线路硬件电气图 3.VD布局图 4.涂胶机操作维护手册
总之,发那科 FANUC 涂胶机器人的应用程序、电气图、VD 布局图和操作维护手册是一个有机的整体,它们共同保障了机器人的稳定运行和高效工作。只有深入了解这些内容,我们才能更好地发挥涂胶机器人的优势,为企业创造更大的价值。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐


 31
31 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)