IsaacLab项目安装运行
Win版:
安装IsaacLab
官方文档:https://isaac-sim.github.io/IsaacLab/main/source/setup/installation/index.html
个人安装IsaacSim版本5.1,安装参考文档即可
机器人资产:建议使用URDF,Isaac Sim 5.0+ 对 URDF 支持更完善
开源项目

本次将使用到两个项目的资源:
Unitree_ros:
-
提供机器人模型文件(URDF/USD)
Isaac Sim>=5.0 && 后续需要修改在Unitree_rl_lab中的配置
git clone https://github.com/unitreerobotics/unitree_ros.gitIsaac Sim<5.0 && 调整目录结构可直接运行
unitree_rl_lab
└── source
└── unitree_rl_lab
└── assets
└── robots
├── go2
│ └── go2.usd (以及其他相关文件)
├── g1
│ └── g1.usd
└── ...
git clone https://www.modelscope.cn/datasets/unitreerobotics/unitree_model.gitUnitree_rl_lab:
-
强化学习训练环境和代码
这个项目是宇树科技(Unitree Robotics)官方维护的强化学习库,它完全基于 NVIDIA Isaac Lab 构建。包含2025年最火的通用人形机器人(Unitree G1, H1)的训练代码,还展示了如何从零开始构建一个符合工业界标准的 Isaac Lab 项目
安装到IsaacLab同级目录
git clone https://github.com/unitreerobotics/unitree_rl_lab.git
进入根目录,启动虚拟环境,找到setup.py目录,安装并且检验
工作流程:
-
UniTree_rl_lab加载unitree_ros中的机器人模型
-
创建训练环境
-
使用强化学习算法驯良策略网路
-
保存训练好的模型
具体配置修改
-
更新路径配置,因人而异,类似:UNITREE_ROS_DIR = r"D:\BIT\JSZN\UniTree_ros\unitree_ros" # Path to unitree_ros package
UNITREE_ROS_DIR = r"D:\BIT\JSZN\UniTree_ros\unitree_ros" # Path to unitree_ros package-
将原项目配置从 USD 切换到 URDF
#之前(使用USD):
spawn=UnitreeUsdFileCfg( usd_path=f{UNITREE_MODEL_DIR}/Go2/usd/configuration/go2_description_base.usd", ),
#现在(使用URDF):
spawn=UnitreeUrdfFileCfg( asset_path=f{UNITREE_ROS_DIR}/robots/go2_description/urdf/go2_description.urdf", )-
工作原理 项目读取配置:UNITREE_GO2_CFG 使用 UnitreeUrdfFileCfg 加载 URDF 路径解析:D:\BIT\JSZN\UniTree_ros\unitree_ros\robots\go2_description\urdf\go2_description.urdf Isaac Sim 自动将 URDF 转换为内部格式(包含 ArticulationRootAPI,版本大于5.0解析USD会缺少这部分而无法运行训练任务) 创建机器人实例用于训练
运行训练任务:
cd D:\BIT\JSZN\UniTreeRLLAb\unitree_rl_lab conda activate isaaclab_learn python scripts/rsl_rl/train.py --task Unitree-Go2-Velocity --headless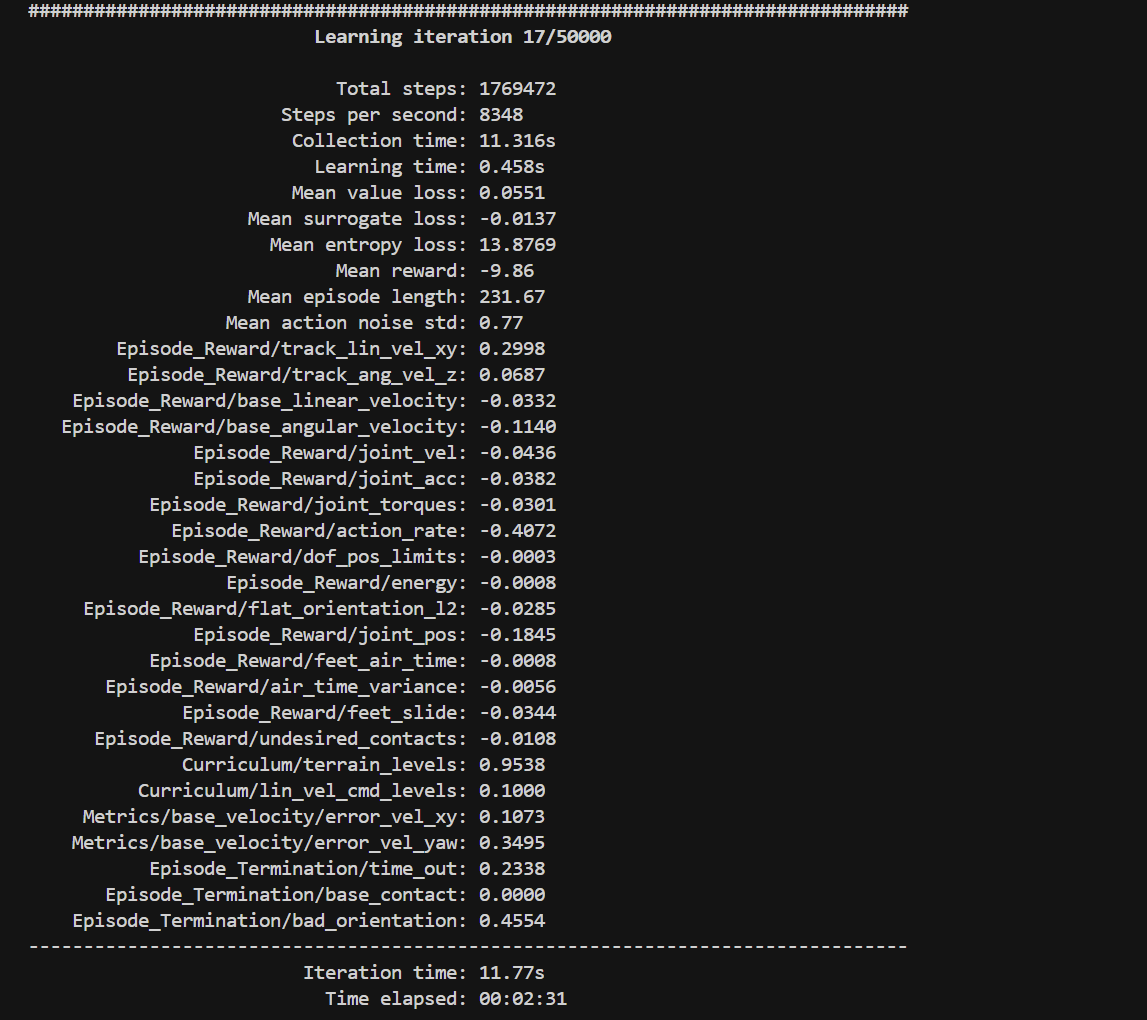
Ubuntu版:
待补充

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐
 14
14 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)