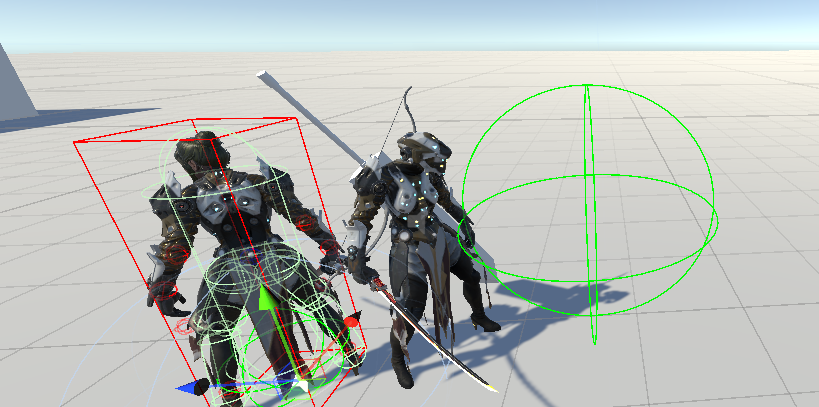
小鹏人形机器人很逆天,但是游戏AI也是发展得很早--一个简单的AI(战斗系统)(Combat)
一个基础的的AI-状态机-脚手架
一方说,现在的AI不是真正的AI的
另一方说,现在的AI就是重大突破
我水平只是地球的水平,到不了火星,所以我是支持后者的,你不能说小鹏的走路姿势不是重大突破,不是真正的走路,在宏观世界
非常奇怪循环
模拟电子--- 数字电子 --- 再回到*模拟电子 --- 已是终点 --- 我们可能不到 *纯数字电子 --- 突破到四,五,六维度;
分享一个很简单的Unity,即可构建框架、
第一次接触AI的概念,可能来自1997这个电影
《星河战队》

STARSHIP TROOPERS
道理,很简单,就是一个大脑,控制很多个小脑
韩国人,c# 委托Delegate
public abstract class UOgreAI : MonoBehaviour
{
public enum EOgreAIState
{
OgreAI_None,
OgreAI_Idle,
OgreAI_PortalFollow,
OgreAI_LeaderFollow,
}
protected void EnterState(EOgreAIState inEnterState)
{
switch(inEnterState)
{
case EOgreAIState.OgreAI_Idle: { Enter_Idle(currentAIState); DelegateAIUpdate = new FDelegateAIUpdate(Update_Idle); } break;
case EOgreAIState.OgreAI_PortalFollow: { Enter_PortalFollow(currentAIState); DelegateAIUpdate = new FDelegateAIUpdate(Update_PortalFollow); } break;
case EOgreAIState.OgreAI_LeaderFollow: { Enter_LeaderFollow(currentAIState); DelegateAIUpdate = new FDelegateAIUpdate(Update_LeaderFollow); } break;
case EOgreAIState.OgreAI_EnemyFollow: { Enter_EnemyFollow(currentAIState); DelegateAIUpdate = new FDelegateAIUpdate(Update_EnemyFollow); } break;
}
}
// 상태 진입.
protected void EnterState(EOgreAIState inEnterState)
{
switch(inEnterState)
{
case EOgreAIState.OgreAI_Idle: { Enter_Idle(currentAIState); DelegateAIUpdate = new FDelegateAIUpdate(Update_Idle); } break;
case EOgreAIState.OgreAI_PortalFollow: { Enter_PortalFollow(currentAIState); DelegateAIUpdate = new FDelegateAIUpdate(Update_PortalFollow); } break;
case EOgreAIState.OgreAI_LeaderFollow: { Enter_LeaderFollow(currentAIState); DelegateAIUpdate = new FDelegateAIUpdate(Update_LeaderFollow); } break;
case EOgreAIState.OgreAI_EnemyFollow: { Enter_EnemyFollow(currentAIState); DelegateAIUpdate = new FDelegateAIUpdate(Update_EnemyFollow); } break;
case EOgreAIState.OgreAI_DashApproach: { Enter_DashApproach(currentAIState); DelegateAIUpdate = new FDelegateAIUpdate(Update_DashApproach); } break;
}
}
protected void LeaveState(EOgreAIState inLeaveState, EOgreAIState inNextState)
{
switch(inLeaveState)
{
case EOgreAIState.OgreAI_Idle: { Leave_Idle(inNextState); } break;
case EOgreAIState.OgreAI_PortalFollow: { Leave_PortalFollow(inNextState); } break;
case EOgreAIState.OgreAI_LeaderFollow: { Leave_LeaderFollow(inNextState); } break;
case EOgreAIState.OgreAI_EnemyFollow: { Leave_EnemyFollow(inNextState); } break;
}
}
}public class UOgreAI_Remote : UOgreAI_Pawn
{
protected override void Enter_Idle(EOgreAIState inPreviousState)
{
base.Enter_Idle(inPreviousState);
}
protected override void Update_Idle()
{
if(myPawnForRemote.IsEnableReserveSkill)
{
}
}
protected override void Enter_PortalFollow(EOgreAIState inPreviousState)
{
base.Enter_PortalFollow(inPreviousState);
ARemoteLeaderPawn leaderRemote = myPawnForRemote.LeaderPawnForRemote;
Vector3 goalTargetPosition = leaderRemote.MoveGoalTargetPosition;
// 씬 전체에 적이 있는지 검사.
if(isFirstIngnoreAuto == false && UGameplayInfo.instance.gameplayHUD.IsPlayingCinematic == false && UInGamePlayerData.instance.isBestFindEnemy)
{
}
// 적이 없으면 대쉬 초기화
if(autoFllowEnemy == null)
{
isEnableFollowEnemyDash = true;
}
// 최종 목표점을 향해 고고.
navMovement.SetDestination(goalTargetPosition);
}
protected override void Update_PortalFollow()
{
if(myPawnForRemote.IsEnableReserveSkill)
{
}
}
}假如你觉得框架太难理解,阅读单个实现代码
//代码类 UOgreAI_Remote.cs |--> : UOgreAI_Pawn
protected override void Update_PortalFollow()
{
//条件一
if(myPawnForRemote.IsEnableReserveSkill)
{
// 드래그 및 버프 스킬은 즉시 스킬 사용.
if(myPawnForRemote.IsDragReserveSkill ||
myPawnForRemote.MySkillSystemForRemote.CurrentActiveSkill.IsBuffSkill ||
myPawnForRemote.MySkillSystemForRemote.CurrentActiveSkill.isHealSKill)
{
ForceNextAIState = EOgreAIState.OgreAI_SkillDashFollowEnemy;
return;
}
}
//条件二
//---- Auto Move Destination
if(autoDestinationType == EAutoDestination.FarEnemy)
{
// 적을 향해 가야 할 경우, 도중에 없어졌다면 다시 포탈포인트를 찾아가도록..
if(autoFllowEnemy == null || autoFllowEnemy.IsDeath)
{
NextAIState = EOgreAIState.OgreAI_Idle;
return;
}
}
else if(isFirstIngnoreAuto == false)
{
// 포탈 포인트를 찾아가는 중에, 적이 발견되었다면 적을 향해 가도록...
if(UGameplayInfo.instance.gameplayHUD.IsPlayingCinematic == false && UInGamePlayerData.instance.isBestFindEnemy)
{
APawn findFollow = UGameplayInfo.instance.FindBestEnemy(myPawnForRemote.ActorPosition);
if(findFollow != null)
{
NextAIState = EOgreAIState.OgreAI_Idle;
return;
}
}
}
//----
base.Update_PortalFollow();
//条件?? 队长
// 자동 이동 상태 끝.
ARemoteLeaderPawn leaderRemote = myPawnForRemote.LeaderPawnForRemote;
if(leaderRemote.IsCanMoveGoalTarget == false)
{
NextAIState = EOgreAIState.OgreAI_Idle;
return;
}
//条件三:搜索敌人
// 목표점을 향해 진행 하면서 리모트가 가지는 검색 범위에서 적을 찾는다.
APawn TNewEnemy = FindEnemy();
if(TNewEnemy)
{
//Debug.Log(TNewEnemy.name);
myPawn.SetEnemy(TNewEnemy);
NextAIState = EOgreAIState.OgreAI_EnemyFollow;
}
}重点在于,这是一个向“”门口“”,传送门移动的状态
AI分析首要条件,第一个条件
- 条件包括:
- 启用了“保留技能”(
IsEnableReserveSkill) - 当前技能是拖拽类、增益类(Buff)或治疗类(Heal)
- 启用了“保留技能”(
移动逻辑,第二条件,处理移动,auto move xxxx
- 如果目标敌人死亡/消失 → 切回 Idle
- 如果在前往传送点途中发现新敌人 → 本应切换到追击状态,但这里却设为
OgreAI_Idle,可能是个 bug - 如果敌人被消失,也会设为 state == Idle
(应为是攻击欲望强的AI,所以Update_Idle 会马上锁敌,所以先让AI Idle, AI还是会自动马上锁敌)
第三个条件 ,巡逻
最后,这是常规巡逻/移动中的敌人检测逻辑
总结:重点在哪里?三个条件
表格
| 优先级 | 代码段 | 说明 |
|---|---|---|
| ⭐⭐⭐ 最高 | 技能判断段 | 直接强制切换状态并 return,决定性逻辑 |
| ⭐⭐ 中 | 自动目标处理 | 处理移动中断逻辑,但可能有逻辑错误(Idle 应为 Follow?) |
| ⭐ 低 | 敌人检测段 | 常规行为,兜底逻辑 |
🔍 建议检查点:
OgreAI_Idle是否写错?
在“发现敌人”时设为Idle不合理,很可能是应设为OgreAI_EnemyFollow或OgreAI_SkillDashFollowEnemy。- 变量名拼写:
autoFllowEnemy→ 应为autoFollowEnemy(多了一个l) - 技能名称一致性:
isHealSKill→ 应为isHealSkill(大小写错误)
ai认为的重在在第一个,因为第一个判断的优先级最高
但实际在于,前后(状态机)
Enter_Portal ,已经在于 Move 必须先制定目的地
Leave_Portal 要停止MovemntMent
新发哥的项目的思维是对的:EnterIdle和 EnterAttack
关键在于“”开关,“”
可以说,代码的这三个条件都不重要
而,上面这一整段代码都是不重要的
重要,Enter()
重要,OgreAI_SkillDashFollowEnemy //冲向敌人 + 技能
重要, Leave()
这段代码的逻辑就不怎么重要了,重要的模块完成,状态机框架完整,然后,这短不重要的 代码逻辑就随意怎么写都行
重要的代码并没有在这里提供,Sorry
参考:
https://chat.deepseek.com/a/chat/s/deccdd38-ce7a-4914-ba52-f2d6db0f6032

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐
 11
11 0
0- 0



 已为社区贡献4条内容
已为社区贡献4条内容

所有评论(0)