具身机器人从研发到量产,网络到底该怎么分阶段规划?
在具身机器人从实验室走向量产的过程中,很多技术负责人会反复面对两个问题:“网络到底该怎么规划?是从一开始就重投入,还是先跑起来再说?”“为什么明明早期‘能连上’,后期却不得不推倒重来?”事实是,网络的复杂度不是线性增长的,而是随着业务阶段发生结构性跳变。真正决定成败的,往往不是技术选型,而是在哪个阶段做了哪些不可逆的假设。
在具身机器人从实验室走向量产的过程中,很多技术负责人会反复面对两个问题:
“网络到底该怎么规划?是从一开始就重投入,还是先跑起来再说?”
“为什么明明早期‘能连上’,后期却不得不推倒重来?”
事实是,网络的复杂度不是线性增长的,而是随着业务阶段发生结构性跳变 。 真正决定成败的,往往不是技术选型,而是在哪个阶段做了哪些不可逆的假设。
从研发到落地:网络是如何一步步变复杂的?
在很多具身机器人企业里,网络往往不是一开始就被认真对待的对象。
原因也很现实:
● 规模不大、设备不多、研发节奏紧,能连上就先用着。网络,似乎可以等“跑起来”之后再说。
但在实际项目中,很多运维负责人都会有一种事后回看的无力感:
网络并不是突然出问题的,而是一步一步,被阶段性需求推到失控边缘的。
如果你正负责一家机器人公司的广域网建设或运维,可能会发现:真正的挑战,并不发生在量产阶段,而是更早。
为什么要用「阶段视角」来看具身机器人网络?
和传统 IT 系统不同,具身机器人高度耦合物理世界:
● 网络不稳定,不只是“慢一点”;
● 延迟和抖动,会直接改变机器人行为结果;
● 网络问题,往往最先被算法和研发感知,却由运维来兜底。
更重要的是——机器人网络的复杂度不是线性增长的,而是阶段性跳变的。
在不同阶段,网络承载的并不是“更多的流量”,而是完全不同形态的流量。
这也是为什么:
用“一张网络一直用”的思路,几乎一定会在后期出问题。
具身机器人网络的三个关键阶段
如果只从网络视角来看,大多数具身机器人企业都会经历下面三个阶段。这里不谈具体技术方案,只谈特征变化:
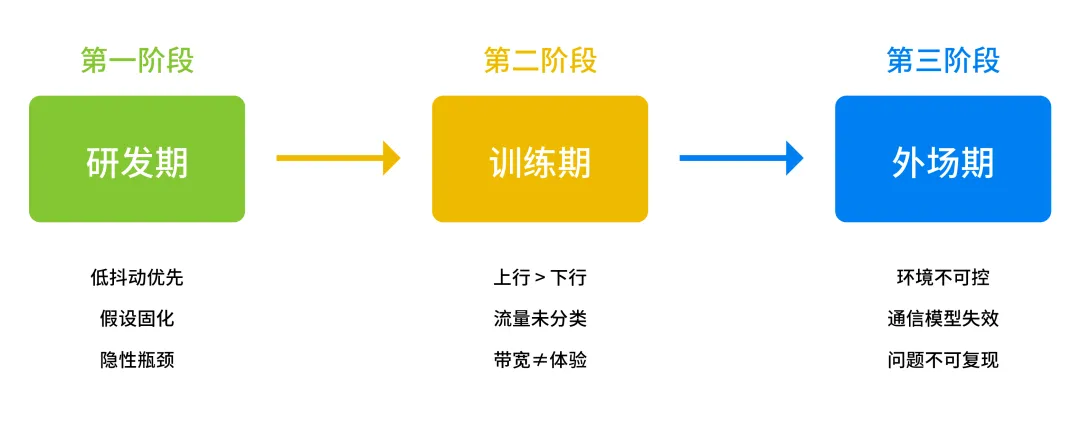
第一阶段:研发期—稳定性压倒一切
这是很多问题被忽略得最彻底的阶段。
典型特征是:
● 高频 SSH 远程调试;
● 研发人员在总部,设备在实验室或测试场;
● 流量不大,但对连续性极其敏感。
在这个阶段,网络通常“看起来没什么问题”:
● 带宽没打满;
● 延迟也不算高;
● VPN / 公网穿透基本能用。
但风险恰恰埋在这里:网络是否稳定,决定的是研发效率,而不是是否能连通。
很多后期难以修复的网络结构问题,往往在这一阶段就已经定型。
第二阶段:训练/试商用期—带宽结构开始失衡力
当研发进入更深阶段,网络关注点会发生第一次明显转移。
典型变化包括:
● 感知数据、日志、视频开始大量回传;
● 上行流量远大于下行;
● 同一时间多设备并发上传。
此时,很多团队会直观地感觉到:
“网络开始变慢了,但又说不清到底慢在哪。”
这是因为网络问题已经从“稳不稳定”,变成了“流量是否被合理对待”。
如果这一阶段仍然沿用研发期的网络结构,运维压力通常会急剧上升。
第三阶段:集成/外场期—网络开始失去掌控边界
当机器人真正走出实验室,网络复杂度会迎来一次跳变。
常见场景包括:
● 设备在工厂或外场;
● 算法与运维在总部;
● 网络跨地域、跨运营商,甚至跨组织。
这时,网络不再完全由企业自身掌控:
● IP / 网段频繁变化
● 不同现场环境不可复制;
● 原本跑通的系统突然“全员失联”;
对运维负责人来说,这往往是最消耗心力的阶段。
为什么“等后期再补网络”往往行不通?
很多企业都会在复盘时问一句:
当时为什么不早点把网络规划好?
现实答案往往是:因为当时并没有意识到,这些变化是结构性的。
网络和代码不同:
● 很难整体推倒重来;
● 很多问题不是配置错误,而是设计前提错误;
● 越往后,修改成本越高。
因此,真正让运维人痛苦的,往往不是“没做”,而是:
当时没意识到,这一步对未来意味着什么。
回到本质
在具身机器人这条赛道上,网络不应该只是“能连上”的工具,而应该被视为研发效率与交付能力的基础设施。
这并不意味着:
一开始就要做得很复杂,或者提前绑定某种具体方案,而是至少要清楚一件事:
很多网络问题,其实在研发期,就已经决定了它将来“怎么坏”。
接下来的文章中,我们会分别展开这三个阶段,从网络视角去看:
哪些问题是阶段性必然出现的,哪些是可以提前避免的。
如果你正在经历其中某个阶段的阵痛,欢迎留言或私信,我们可以聊聊如何避免踩同样的坑。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐


 15
15 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)