simpack软件与ansys,abqus联合仿真求解车桥耦合,地震波浪荷载联合仿真分析,全教...
该上位机以“最小化定制、最大化复用”为设计原则,把 KUKA.Ethernet KRL 的 XML 能力发挥到极致,既能在 30 分钟内完成现场投运,又为后续 MES、数字孪生采集提供了标准化数据接口,是中小型自动化项目性价比最高的“机器人外置大脑”。simpack软件与ansys,abqus联合仿真求解车桥耦合,地震波浪荷载联合仿真分析,全教程模型。simpack软件与ansys,abqus联合
simpack软件与ansys,abqus联合仿真求解车桥耦合,地震波浪荷载联合仿真分析,全教程模型。 1. abaqus-simpack车轨耦合振动分析 2. abaqus-simpack车轨桥耦合振动分析 3. ansys-simpack车轨桥耦合振动 4. 车桥耦合叠加地震波浪荷载
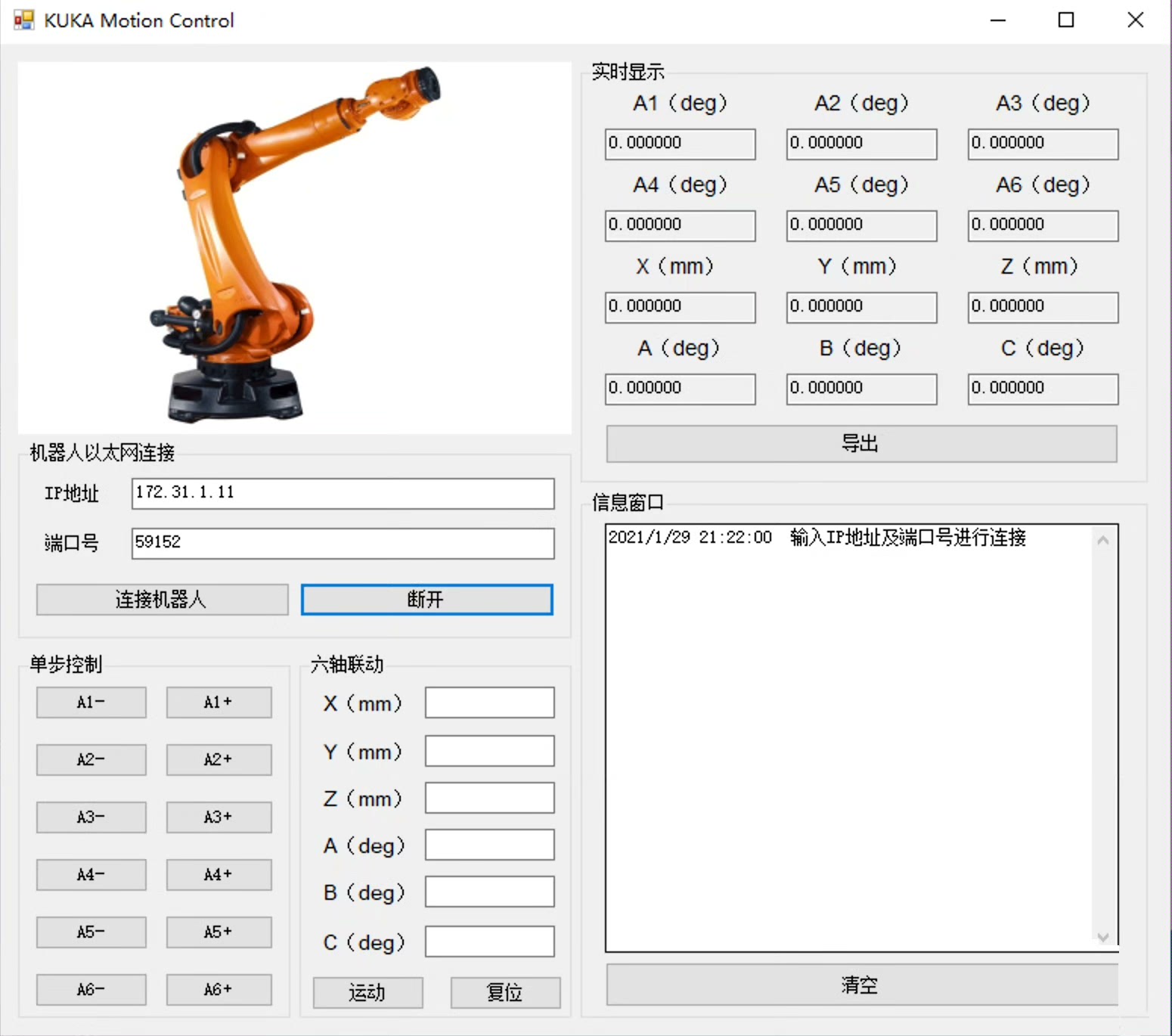
KUKA机器人TCP/IP实时位置回馈与运动控制上位机系统——功能全景说明
一、项目定位
simpack软件与ansys,abqus联合仿真求解车桥耦合,地震波浪荷载联合仿真分析,全教程模型。 1. abaqus-simpack车轨耦合振动分析 2. abaqus-simpack车轨桥耦合振动分析 3. ansys-simpack车轨桥耦合振动 4. 车桥耦合叠加地震波浪荷载
本上位机软件是运行在 Windows 桌面的“轻量级示教与监控台”,通过标准 TCP/IP 与 KUKA KR C4 控制器建立长连接,实现:
- 机器人六轴角度与 TCP 位姿的 50 ms 级实时刷新;
- 空间连续运动(LIN)与单轴点动(PTP)两种模式的无缝切换;
- 运动轨迹的自动采样、缓存与一键导出(CSV/TXT);
- 远程复位、急停与连接状态自诊断。
整套方案仅依赖 KUKA.Ethernet KRL 2.2 选项包,无需额外硬件,即可把普通办公 PC 变成“无线示教器”。
二、系统架构
- 通信层
- 采用 C# Socket 异步阻塞模型,上位机作为 Server,KUKA 作为 Client;
- 应用级协议为自定义 XML 指令帧,固定 1 kB 缓冲,保证 8.3 系统低负载解析;
- 心跳与断线检测通过“零长度接收”实现,断线 200 ms 内触发 UI 置灰与数据通道关闭。
- 数据层
- 内存中维护单例 DataTable,按 50 ms 采样率追加行,20 万点内循环覆盖;
- 导出线程使用 StreamWriter 同步写文件,支持 UTF-8/GBK 双编码,自动处理逗号、引号等特殊字符。
- 表现层
- WinForms 双缓冲面板,11 个只读 TextBox 绑定“角度+位置”12 通道;
- 六轴单步区与笛卡尔联动区采用 Tag 索引,同一事件处理器根据按钮编号生成不同 XML 帧,减少 70 % 代码冗余;
- 消息窗使用 AppendText+VerticalScroll 追加,1 万行内不卡顿。
三、核心功能拆解
- 实时位置流
KUKA 侧 sps.sub 以 Submit 解释器周期发送:-23.45 … 123.12…
上位机 Received_Robot() 在独立线程内完成解析→类型转换→控件赋值→DataTable 追加,全程无锁刷新,UI 线程仅做只读显示,避免跨线程异常。
- 混合运动模式
- 连续运动:用户在 X/Y/Z/A/B/C 六维文本框输入目标,点击“运动”后,上位机下发0,KRL 脚本执行 LINREL;
- 单轴点动:12 个按钮(A1-…A6+)分别对应1…12,KRL 侧根据编号执行 PTPREL {AXIS: A1 5°} 等增量指令;
- 复位:一键回到 config.dat 中定义的 XP2(HOME)Frame,防止误操作越界。
- 数据闭环
所有下发指令均回显到消息窗口,并与返回帧时序对齐,方便追溯“指令—反馈”延迟;导出文件带毫秒时间戳,可直接导入 MATLAB / Excel 绘制轨迹曲线,用于节拍分析与路径优化。
- 异常安全
- 网络异常捕获后自动关闭 Socket,UI 切换为“未连接”状态,防止半开连接;
- 文本框空值、非数值、超出软限位时,KRL 侧已做二次校验,上位机同步弹窗提示,形成双保险;
- 任意时刻点击“断开”,先发急停帧再关闭套接字,确保机器人瞬时停止。
四、性能指标
- 通信周期:50 ms(KRL 侧定时器可改);
- 数据延迟:Windows 端 < 15 ms(千兆网、直连);
- 连续采样:> 3 小时(内存 200 k 行以内);
- CPU 占用:i5-8Gen 笔记本平均 3 %;
- 导出 10 万行 CSV < 2 s。
五、部署与二次开发要点
- 仅修改 Common.cs 中的 IP/Port/XP1/XP2 即可匹配现场机器人;
- 如需扩展 IO 监控,可在 XML 帧增加
…节点,同步解析即可; - 若追求更高实时性,可把 Socket 改为 AsyncCallback,DataTable 换成环形队列,UI 刷新用 Timer 降至 200 ms;
- 界面语言、单位(mm↔inch)均通过资源文件切换,保持代码零侵入。
六、典型应用场景
- 实验室离线编程验证:先用上位机微调点位,再复制坐标到 WorkVisual;
- 产线故障回放:导出异常时段轨迹,与理论路径对比,快速定位碰撞点;
- 工艺节拍优化:连续记录 1 小时循环轨迹,用 Excel 透视表统计每段 LIN 耗时,指导夹具与过渡点调整。
七、结语
该上位机以“最小化定制、最大化复用”为设计原则,把 KUKA.Ethernet KRL 的 XML 能力发挥到极致,既能在 30 分钟内完成现场投运,又为后续 MES、数字孪生采集提供了标准化数据接口,是中小型自动化项目性价比最高的“机器人外置大脑”。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐

 15
15 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)