【机器人系统】末端执行器
力/力矩传感器是一种能感知力、力矩并转换成可用输出信号的传感器,核心原理是将力作用下的形变转换成电信号,当有力/力矩作用时,力/力矩施加于传感器本体单元上,并引起本体单元的应变或形变,检测系统感知本体的应变或形变,通过电路将其转化为相应电压,通过测量电压值来表征力/力矩大小,并转换成可用输出信号,实现力/力矩的测量。柔性触觉传感器又称为“电子皮肤”,能够实现与环境接触力、温度、湿度、震动、材质、软
一、末端执行器(传统VS新型)
末端执行器 (End Effector) 是机器人执行部件的统称,一般安装于机器人腕部的末端,是直接执行任务的装置。末端执行器作为机器人与环境相互作用的最后环节与执行部件,对提高机器人的柔性和易用性有着极为重要的作用,其性能的优劣在很大程度上决定了整个机器人的工作性能。
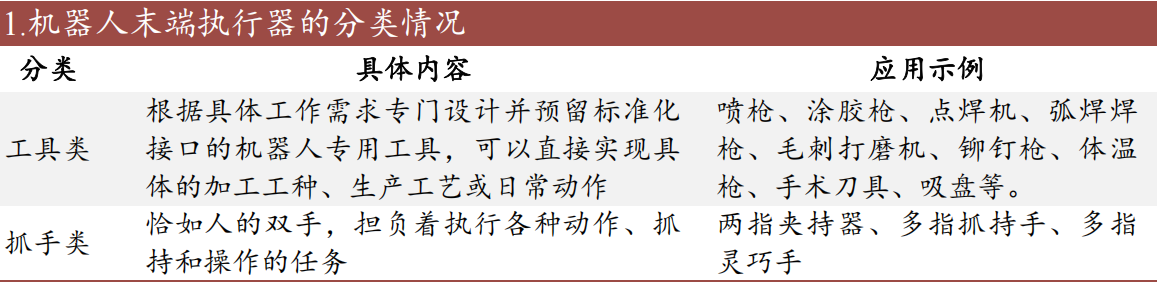
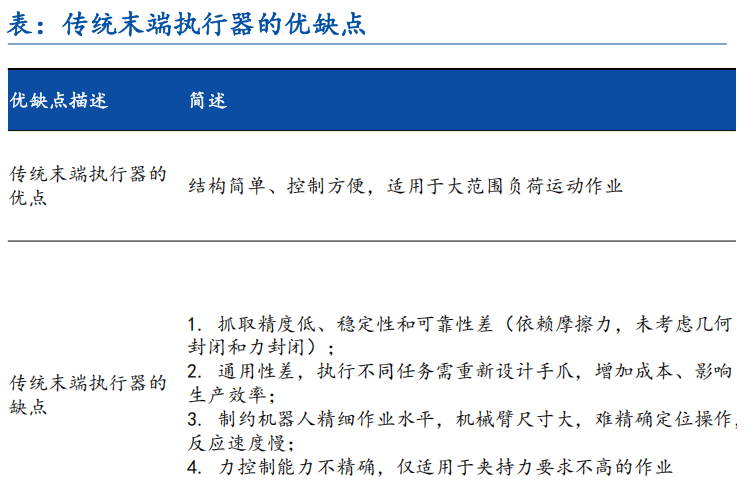
传统的末端执行器是功能单一、为特定任务而设计的工具,比如平行二指夹爪、真空或磁性吸盘、焊枪、喷枪、抛光轮等等单一工具。传统末端执行器结构简单、便于控制、适用于大范围负荷运动作业等优点,现今在一些特定领域仍然有很大需求,但是也存在通用性差、精度不足、可靠性欠缺等一系列缺点。
灵巧手是机器人新型末端执行器,能够在极限或者有害环境下替代人类进行复杂的操作任务,在机器人与环境的交互中起关键作用,主要由驱动、传动、感知三大模块组成。
人的双手经过长期劳动进化完美,可应用于不同场合完成不同工作任务,具备充分的泛化性。灵巧手以人手的结构和功能为模仿对象,是机器人实现精细操作的基础,其需要完成抓、握、捏、拧、旋转等不同动作,以满足多元化的场景需求。“灵巧”指的是手的姿势可变性,这种可变性越高,则认为手就越灵巧。

多指灵巧手最普遍的手指数目为 3-5 个,各手指具有 3个关节,手指关节的运动副都是采用转动副。运动副就是两个构件(零件)之间允许某种相对运动的连接方式。可以理解为一种“有约束的关节”。它既让两个零件连在一起,又规定了它们之间能怎样动、不能怎样动。例如,门和门框通过合页连接:这个合页就是一个运动副。它允许门相对于门框转动,但不允许门上下移动或脱离门框。

二、灵巧手的分类
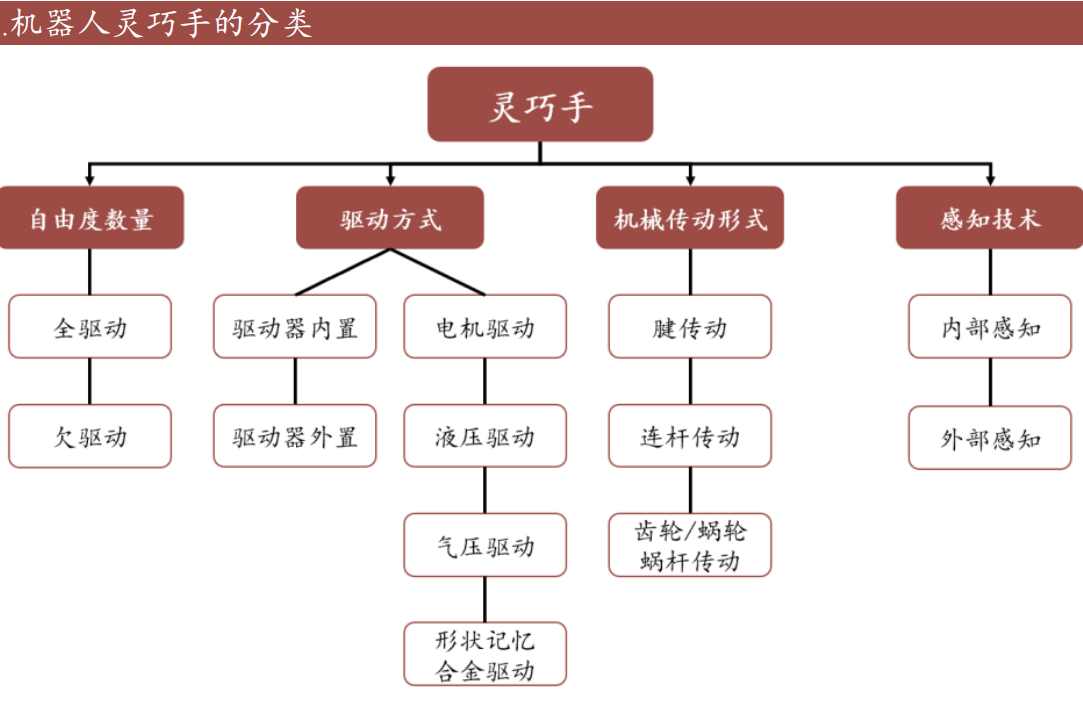
灵巧手的分类纬度有自由度数量、驱动方式、传动形式、感知形式。
人类手指拥有两种运动形式,通过各指节旋转副的屈曲/前伸运动以及通过手指末端球形副的侧摆运动。我们暂且定义每根手指屈曲的方向为 Pitch,侧摆的方向为 Roll,那么对于 Pitch 方向的自由度,每根手指都有 3个,共 15个,对于 Roll方向的自由度,大拇指有 2个自由度,其余手指各 1个,共 6 个。整手通过这 21 个自由度,实现了复杂多变的人手运动形式。由于真实人手的高自由度、结构紧凑、复杂等特征,绝大多数机械手都无法完美复制人手的功能,其设计和功能都是在某些特定场合和功能要求下的简化和权衡。
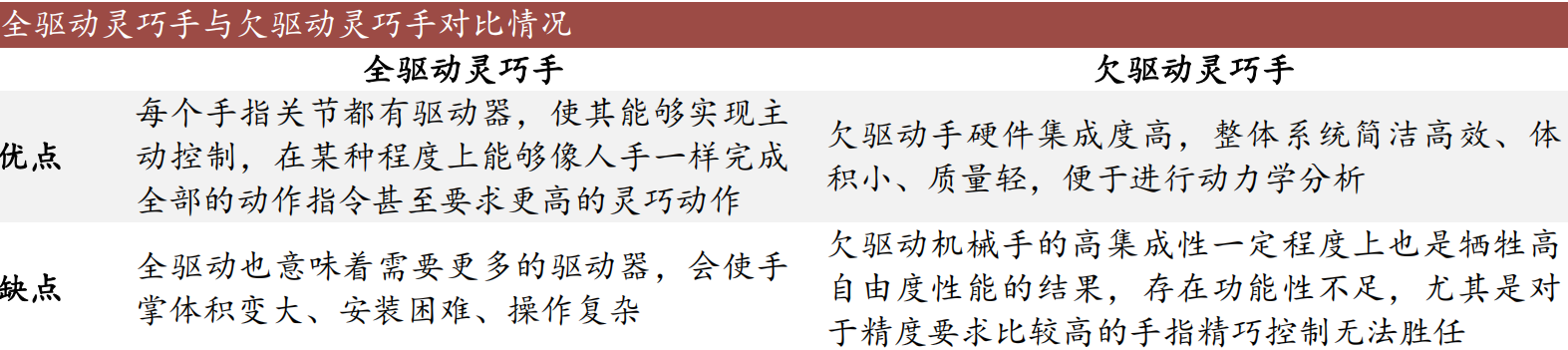
根据自由度与驱动源数量,可将灵巧手分为全驱动和欠驱动两大类。全驱动灵巧手驱动源的数量与被控制灵巧手的自由度数量相等,欠驱动灵巧手被控制的自由度多于驱动源的数目,缺少驱动源的部分则进行耦合随动。
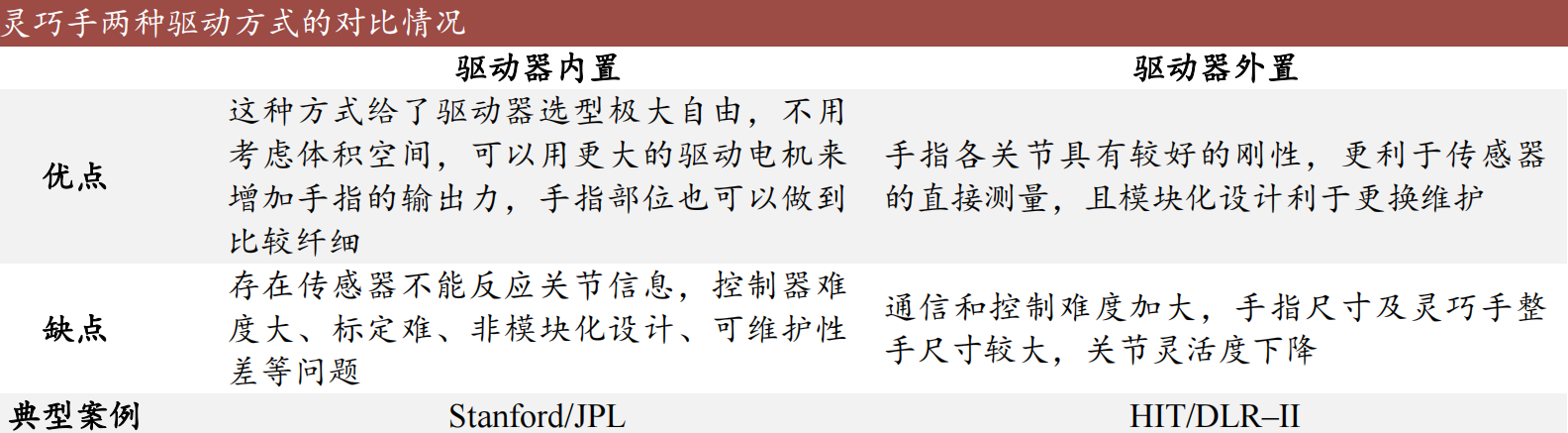
驱动系统是整个系统的动力源,是系统输出力的保证。灵巧手的驱动方式根据驱动器是否布置在手指内分为两种:驱动器内置与驱动器外置。早期的多指灵巧手一般将驱动器外置,主要是受驱动器结构尺寸影响,难以嵌入手指内。随着材料、工艺技术的发展,驱动器的尺寸逐渐减小,机器人多指灵巧手逐渐走向驱动器内置式。驱动器内置很难做到驱动整根手指,于是混合式多指灵巧手的概念就出现了,即驱动器外置和内置相结合的方式,进一步提高手指的输出力矩,保证较高自由度的同时,控制体积大小。
三、灵巧手的驱动模式
驱动源是驱动系统的动力源,驱动源性能决定了驱动系统的驱动性能。目前,主流的驱动源有:电机驱动、液压驱动、气压驱动、形状记忆合金(SMA)驱动。

(1) 电机驱动:目前多指灵巧手的主要驱动方式,具有驱动力大、控制精度高、响应快、模块化设计、易于更换维护等优点。但是电机本身固有的体积较大等缺陷,导致无论是外置还是内置,都会占用较大的物理空间,并且市场上很难匹配到通用电机。

(2) 液压驱动:液压驱动式机械手的驱动系统一般由液动机、伺服阀、油泵和油箱等组成,驱动机械手完成任务,常被用于工业机械手中,适合大型抓取作业。液压驱动能获得较大的工作力,能带动较大的负荷,但体积大,成本高,容易被污染。

(3) 气压驱动:基于气动驱动的灵巧手是近年来的研究热点,它是比较接近人体肌肉驱动的一种方式。气压驱动的优势在于操作方便、质量轻巧、动作迅速、价格适中、维护简便,缺点在于可操作性不强,轨迹精度不够。
(4) 形状记忆合金 (SMA):形状记忆合金是美国海军在研究时无意发现的一种金属材料,之后更多种类的 SMA 被大量研发。其中,Ni-Ti (镍钛诺Nitinol是接近等原子量的镍钛合金总称,名称源自美国海军武器实验室缩写)形状记忆合金的性能较为优良,广泛应用于多个领域。形状记忆合金驱动适合小型、高精度机器人装配作业,它可以进行负载驱动快速反应,且位移大,变位迅速,但其无法长时间工作,并且疲劳强度较低。
四、灵巧手的传动模式
机器人灵巧手传动系统把驱动器产生的运动合力以一定的方式传递到手指关节,从而使关节做相应的运动,传动系统的设计与驱动器密切相关。虽然驱动源是影响灵巧手体积重量的重要因素,但是抓取稳定性和灵活性等重要指标取决于传动系统。机械传动机构的选择对于灵巧手的性能至关重要。一方面决定了机械设计的复杂程度以及成本,另一方面则直接影响灵巧手传动的效率和可靠性。
灵巧手的主要传动方式有腱传递、连杆传动和齿轮/蜗轮蜗杆传动。线绳驱动是目前灵巧手研究中应用最为广泛的一种传动方式;齿轮/蜗轮蜗杆传动在工业机器人中应用比较广泛;连杆传动多用于工业和商业用途,多个连杆串并联混合的使用形式较为常见。
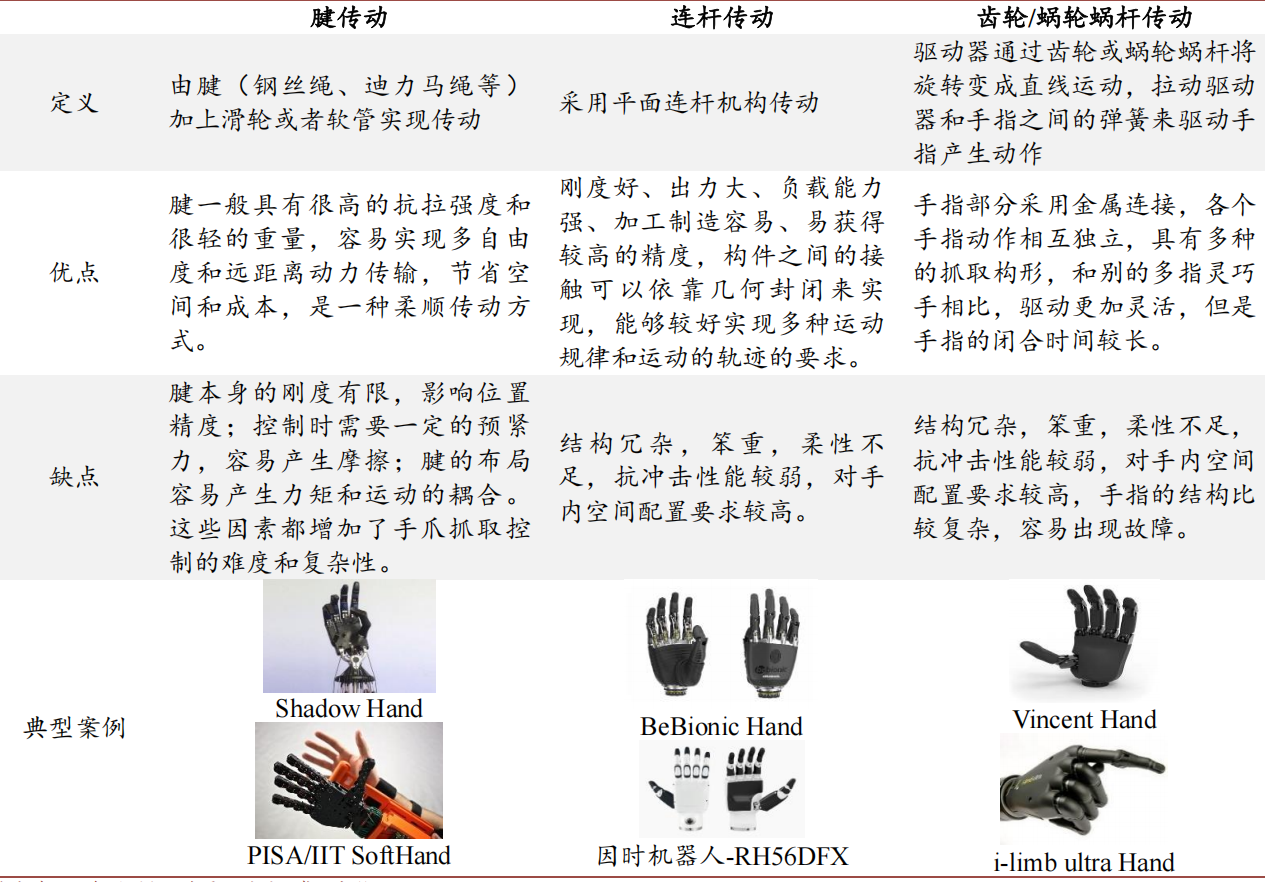
腱绳具备轻量化、柔性化等优势。当前国内主流采用的连杆传动方案虽具备双向控制、耐用性强、制造维护便捷等优势,但其结构笨重、柔性不足、抗冲击性弱等固有缺陷正成为技术升级的瓶颈。
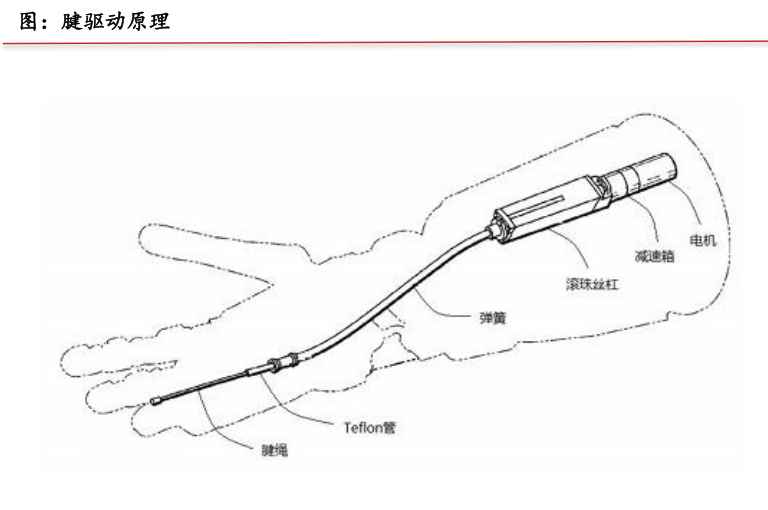
常见传动方案中,腱绳传动是一种通过柔性肌腱实现动力传递的机器人灵巧手关节驱动方案。由于灵巧手对紧凑性的严苛要求,电机、减速器等大体积驱动组件难以集成到有限的手部空间内。腱绳传动可将驱动单元外置于前臂或机身,通过腱绳和滑轮结构将动力传递至手指关节。虽然腱绳传动具备轻量柔性等优势,但在实际应用中仍存在一定挑战:布线复杂、需配备张力感知机构,以及滑轮系统中的摩擦问题等,对性能表现带来一定影响。在高自由度设计中,系统体积和集成难度较大,例如Utah/MIT手需大量滑轮与独立驱动空间;而Pisa/IIT SoftHand虽简化驱动,却在精度上有所妥协。
目前国内采用腱绳传动的灵巧手以灵心巧手的L30腱驱版为代表。这一趋势在特斯拉Optimus灵巧手的迭代中得到了充分验证:从早期“蜗轮蜗杆+腱绳”混合传动(存在结构笨重、动态响应不足等问题),到第三代采用“行星齿轮箱+行星滚柱丝杠+腱绳”复合传动方案的协同设计,成功解决了传统方案在重量与灵活性之间的矛盾,使灵巧手在提升单手承载力的同时,仍能保持接近人类手指的灵活运动能力。这一演进过程充分展现了腱绳传动在实现远距离柔性动力传输方面的不可替代性,是构建高性能灵巧手的理想选择。
目前,主流的腱绳传动方案有三种:N型、N+1型、2N型。其中,N、N+1、2N分别代表驱动N个独立自由度所需的驱动单元数目。
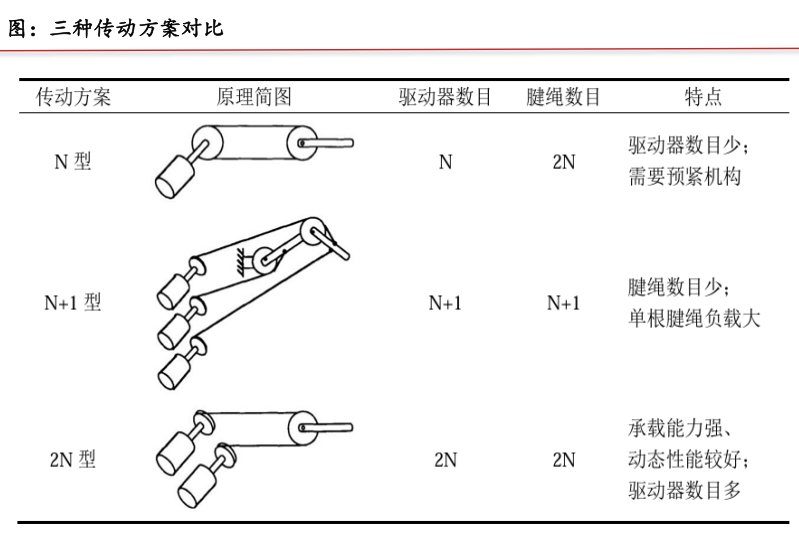
腱绳主流应用材料为超高分子量聚乙烯纤维(UHMWPE)。目前主流材料为超高分子量聚乙烯纤维(UHMWPE),具备超高强度(13倍于钢)、极低密度、优异耐磨性与化学稳定性。不过,长期处于辐射与机械载荷作用下会导致结晶度上升,从而影响韧性与摩擦学性能,限制其使用寿命与可靠性。因此,科研机构和企业正通过表面改性与复合工艺手段进行优化,推动其在高精度、高耐久场景下的可靠应用。此外,腱绳传动可根据每个关节驱动器数量分为N型、N+1型和2N型三种配置,适配不同自由度与控制策略。相较其他方案,其轻量化优势显著,同时支持欠驱动设计,能提升抓握灵活性与适应性。正因如此,腱绳传动被认为是当前最有可能突破灵巧手“不可能三角”(成本—系统参数—稳定性)限制的技术路径。目前该技术已广泛应用于机器人灵巧手及仿人机器人等领域,不同配置方案为开发者在自由度、紧凑性和控制精度等关键指标之间提供了多样化的选择空间。
五、灵巧手的感知技术
机器人灵巧手的感知技术可以分为内部感知和外部感知。灵巧手的运动参数如位置、速度、加速度等均属于内部感知检测的范围,外部感知则针对于周围环境的信息检测,外部环境信息的复杂多样性增加了检测的难度。内外部传感器提供了对手部位置、姿态、物体位置和力度的准确测量,为灵巧手的操控提供了必要的反馈信息。然而,要实现像人类皮肤一样的复杂和柔性结构并保持优良的感知功能依然很困难,因此,电子皮肤的研究将会是灵巧手感知技术的一个热点问题。
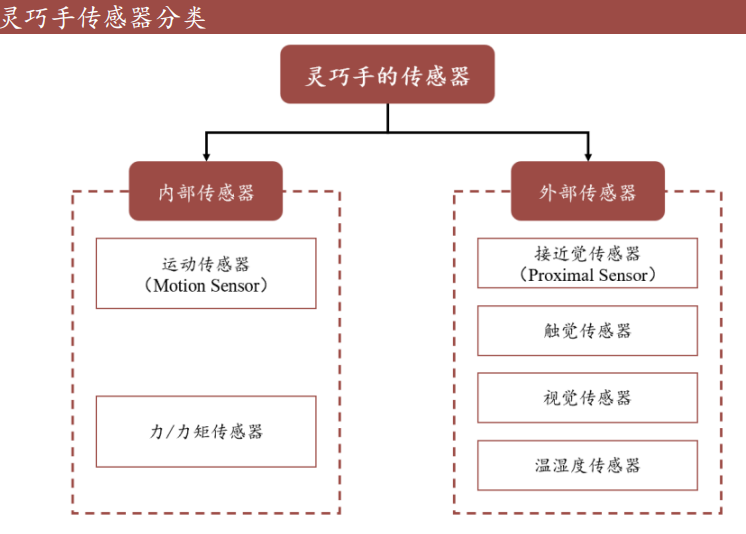
(1) 内部传感器
运动传感器:在灵巧操作过程中,运动传感器用于测量机器人手的关节角度、电机位移等。对于机器人的运动学分析而言,这两类信息都是必不可少的。更精确的关节角度信息可以减少指尖的运动误差。两种常见的运动传感器为位置传感器(Position Sensor)和弯曲传感器(Bend Sensor)。
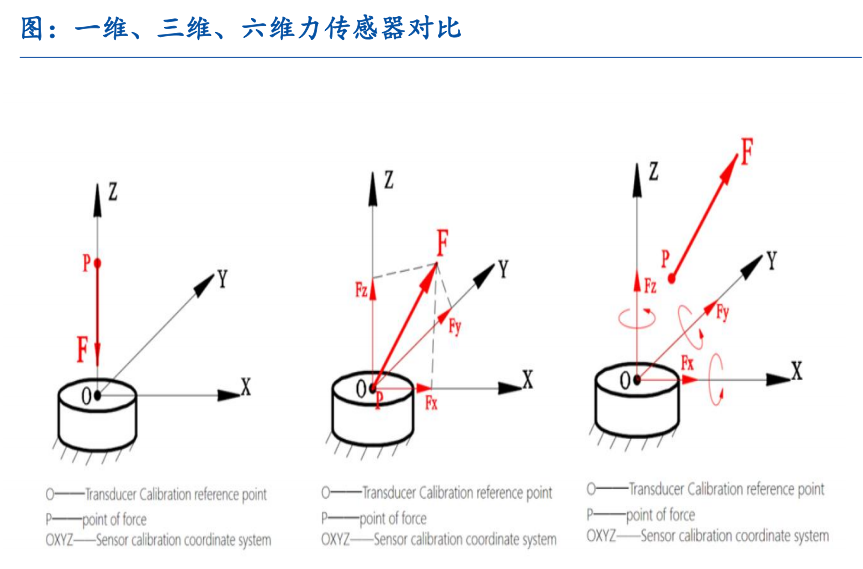
力/力矩传感器:力/扭矩传感器提供机械手的动态信息,动态信息是机械手进行稳定的灵巧抓取和操作的必要条件。因此,力/扭矩传感器对于与未知物体进行交互至关重要,无论在操作安全性还是自主性方面都是如此。对于机械手和机器人手而言,关节处通常都配备有关节扭矩传感器。力/力矩传感器是一种能感知力、力矩并转换成可用输出信号的传感器,核心原理是将力作用下的形变转换成电信号,当有力/力矩作用时,力/力矩施加于传感器本体单元上,并引起本体单元的应变或形变,检测系统感知本体的应变或形变,通过电路将其转化为相应电压,通过测量电压值来表征力/力矩大小,并转换成可用输出信号,实现力/力矩的测量。人形机器人关节处使用单维力传感器,执行器末端主要使用六维力传感器,目前国内厂商主要处于提高测量精度及降本阶段。
(2) 外部传感器
接近觉传感器:在抓取或操纵物体之前,接近觉传感器总是用来为机器人提供检测物体表面和物体与机器手之间相对位置的能力。对于人类来说,这种能力通常由视觉反馈提供,但对于机器人来说,这种能力可以由接近觉传感器提供。有了接近觉传感器,机械手就能在操作前估算出物体的位置、形状和其他物理信息。对于灵巧操作而言,提前了解这些信息有助于提高操作的成功率。
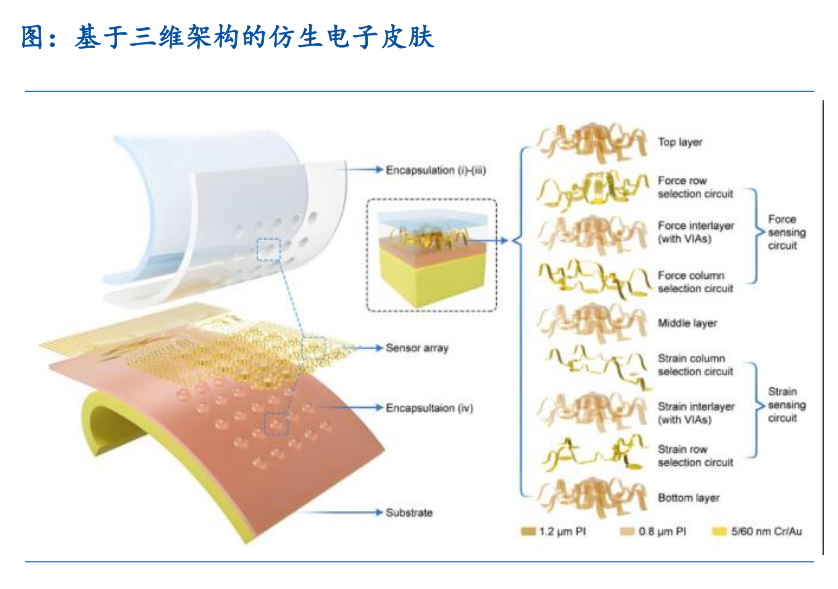
触觉传感器:对于人类的双手来说,触觉系统可以提供丰富的信息,如抓取物体的力度、质地、温度和硬度等,人类双手的熟练程度取决于其复杂的结构和强大的感觉系统。在早期阶段,触觉传感器研究的主要方向是压力和力的测量,几乎所有的机械手都将配备这类传感器,通常安装在指尖,用于测量多维力。目前大多数机器手配备的传感器都是多阵列触觉传感器(Multi array tactile sensor),但仍然只能感知单模态信息。对于机械手来说,同时获取多模态触觉信息也很重要,多模态传感器(Multimodal Sensor)提供了解决方案,可同时获取多种触觉信息。触觉传感器本质上是将接触面形状、压力、摩擦力、温度等信息进行感知识别和转换的传感器,其组成部分包括电极、敏感材料和导电材料等。当下触觉传感器两种主要的技术路线:MEMS、柔性触觉传感器(电子皮肤)。
柔性触觉传感器又称为“电子皮肤”,能够实现与环境接触力、温度、湿度、震动、材质、软硬等特性的检测,是利用柔性材料的物理特性,将外部的力学量转换为电信息,从而实现对触觉感知的传感器产品。 其具备类似于人类皮肤的柔韧性,可以适应任意载体形状,更利于测量物体表面受力信息、感知目标物体性质特征,具有研发和产业化价值,目前正处于研发和小批量应用阶段。
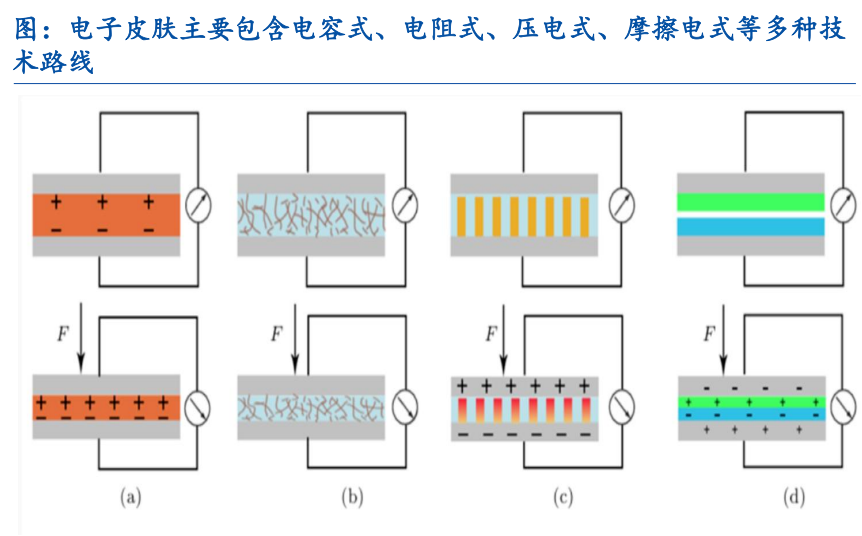
技术层面来看,按照转换信号原理的不同,柔性触觉传感器可以分为压阻式(电阻式)、电容式、电感式、压电式、光电式等,其中电容式、压阻式柔性传感器应用较多。柔性压阻式传感器以器件结构简单、灵敏度高、响应快、制造成本低、稳定性好等优点被认为是下一代柔性压力传感器的理想选择。劣势是体积大,不易实现微型化;功耗高,接触表面易碎;易受噪声影响。电子皮肤作为仿生智能界面,其研发面临材料、制造和算法三端协同挑战。产业链涵盖材料研发、传感器制造、系统集成、终端应用等多个环节。
六、灵巧手的国内外研究
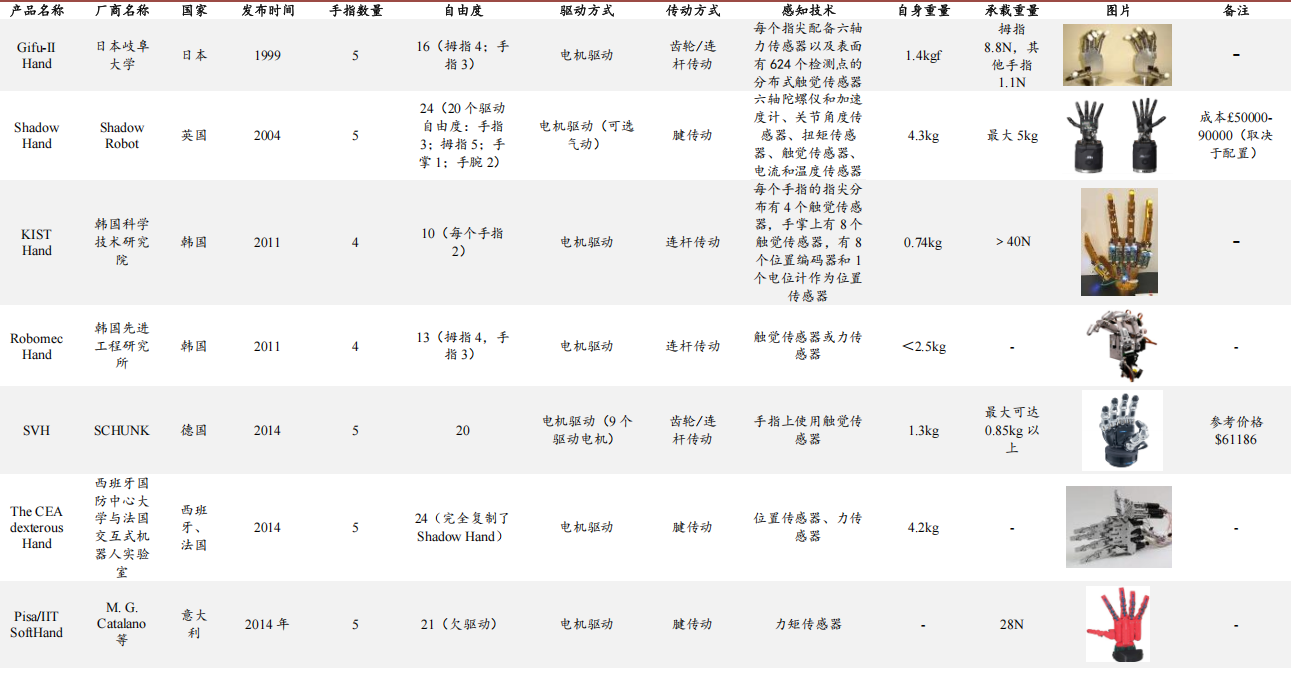
自 20世纪 70 年代起,国内外对灵巧手展开了大量研究,从三指到五指,从工业到生活,从简单的抓取到灵巧操作,以期解决复杂的实际作业问题。海外灵巧手研究历经了 50 余年的发展,2010年后相关研究加速,目前正向更高仿生度、更强感知能力和轻量化方向发展。1974年,日本电工实验室研发的Okada灵巧手n1是严格意义上的第一款灵巧手,由3个手指组成,共11个自由度;20世纪80年代,灵巧手研究大幅增加,以斯坦福大学研发的Stanford Hand为代表,其具有3个手指9个自由度,单只手指采用4个电机驱动,并利用N+1腱传动结构控制N个自由度,同时能够保证腱具有正张力。2016年,华盛顿大学基于仿生设计原理研制出一款灵巧手,质量小于1kg,利用人造关节囊、韧带、肌腱和弹性滑轮结构设计,使得人手的韧带和关节特征得以复现,抓取也更加灵活可靠。2021年,韩国的科研团队研发了一种集成连杆驱动的灵巧手ILDA,共有15个自由度(20个关节)、34N的指尖力,结构紧凑,无须外置驱动部件,质量仅为1.1kg,在手指关节处安装有触觉传感器,具备感知能力,可以轻松抓取鸡蛋,并可完成剪纸、夹装芯片和挤压瓶罐等操作。整体来看,灵巧手产品在向更高仿生度、更强感知能力、轻量化的方向迭代。
国外灵巧手产品对比:
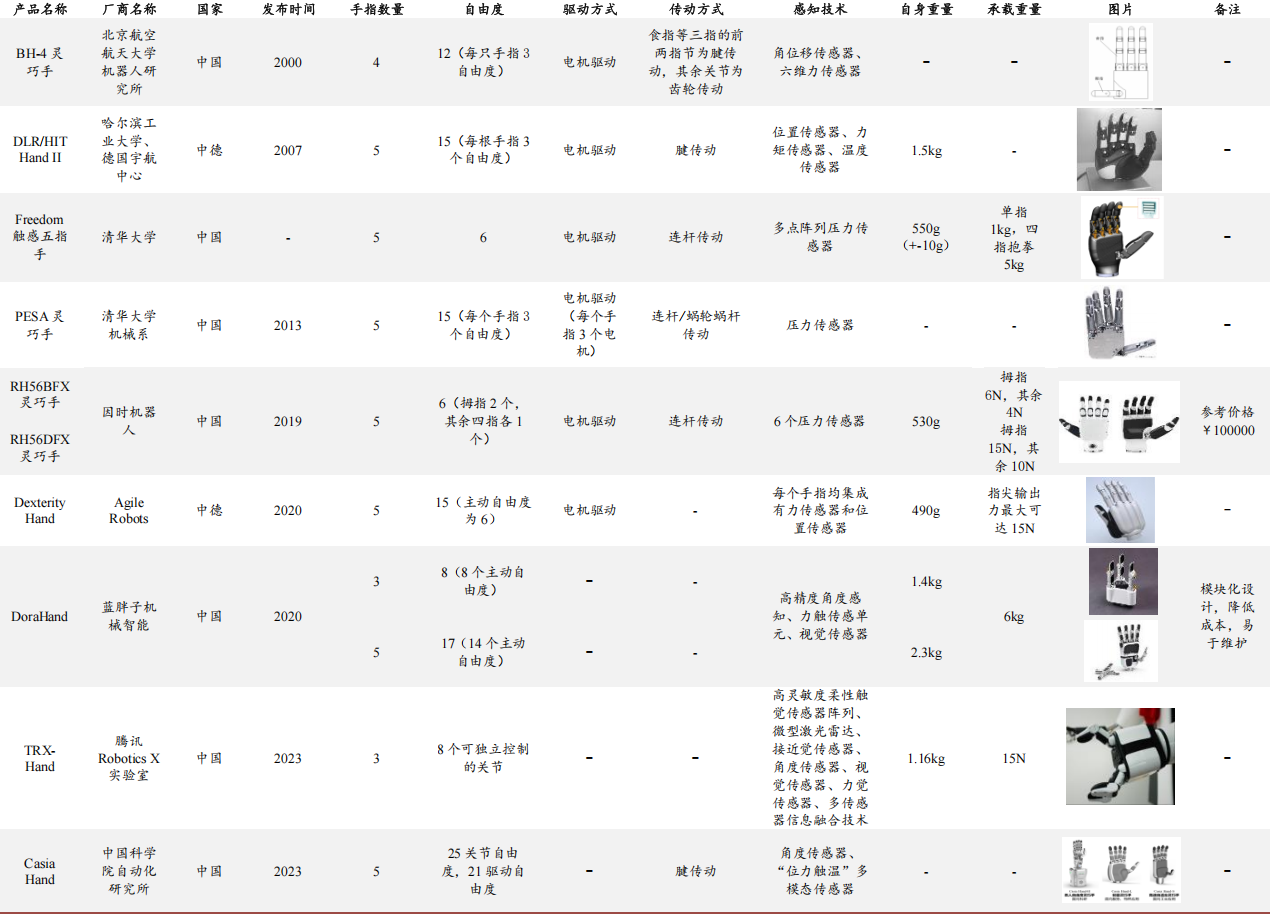
国内灵巧手产品对比:
七、典型公司
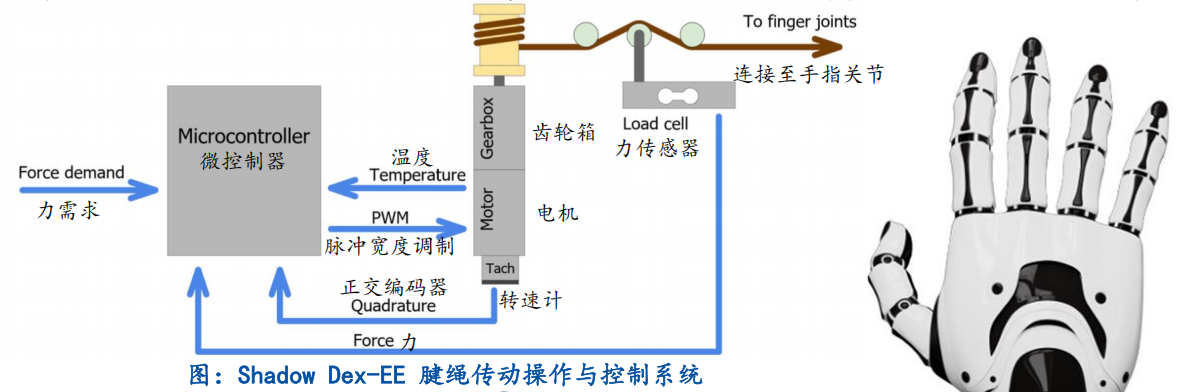
Shadow Robot Company 公司成立于1997年,是英国老牌机器人企业,专注于机器人灵巧手和远程控制系统的开发。公司长期致力于开发仿人机器人部件,灵巧手产品拥有媲美人手的运动学设计。灵巧手产品广受NASA、GSK、西门子、MIT、高通等全球顶尖机构认可,是全球最早将高自由度灵巧手商品化的企业之一。Shadow系列灵巧手完全集成ROS、可通过EtherCAT接口以100Hz至1kHz的频率提供实时反馈、可轻松集成在机械臂、且支持其他组件升级;与Google Deepmind合作后最新推出的Shadow Dex-EE声称是“市场上最坚固耐用的机械灵巧手之一”。公司所有产品均为客户提供集成了用于抓取和操作开发的完整物理模型代码库,且所有微控制器的源代码和电子子系统的原理图均可在保密协议下获取。软件接口完全一致,无需修改代码,只需更换对应的启动文件即可在开发流程中无缝切换模拟和真实硬件,方便调试和部署。
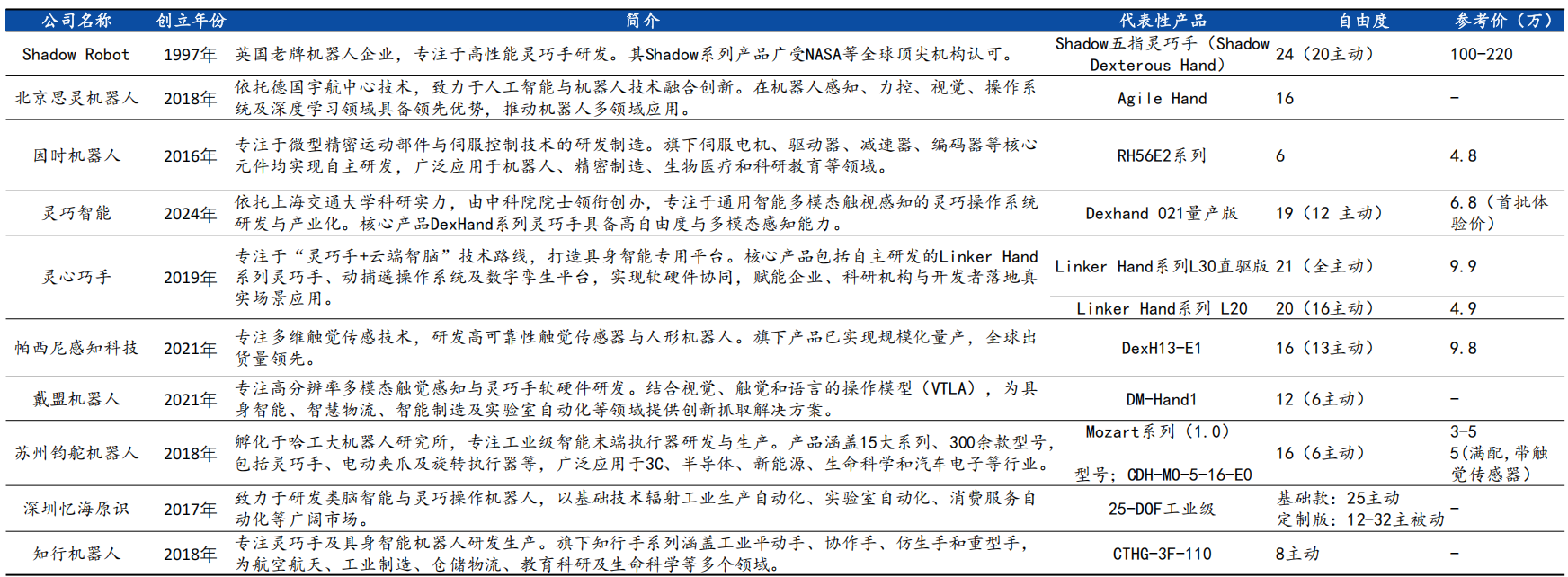
单只灵巧手价格约为 5 万元到十万元。
从灵巧手的产业链看,相关公司包括:
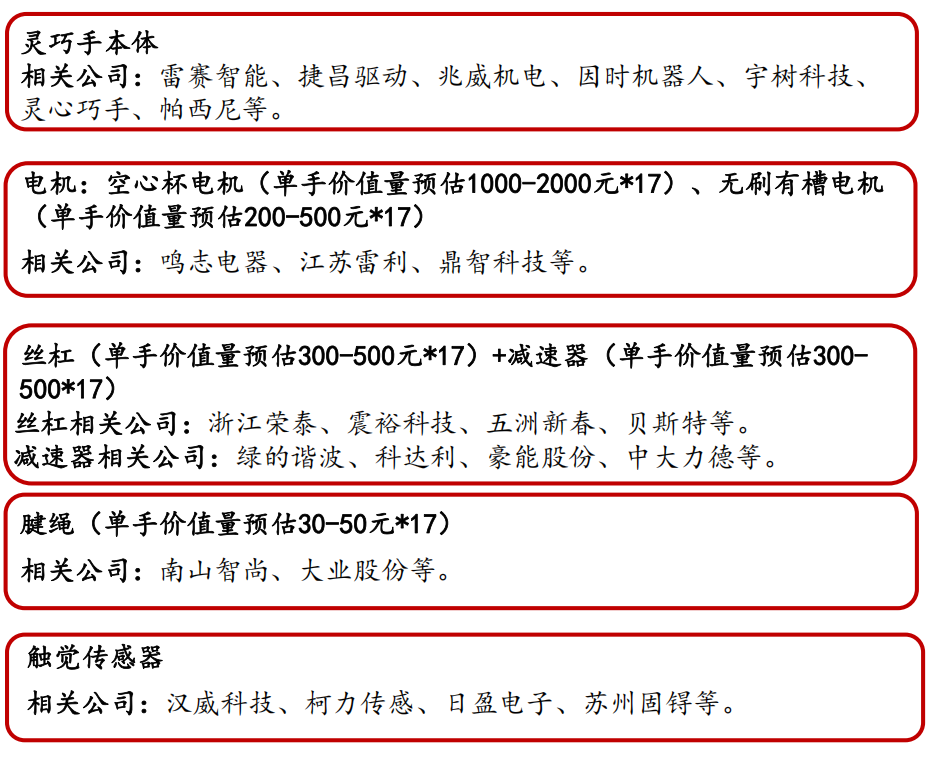

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐

 9
9 0
0- 0



 已为社区贡献12条内容
已为社区贡献12条内容

所有评论(0)