vrep/coppeliasim+matlab机器人轨迹控制仿真:利用matlab读取轨迹并控...
vrep/coppeliasim+matlab,机器人轨迹控制仿真,利用matlab读取轨迹并控制机械臂在墙上绘图,里面有轨迹规划的相关算法。 此为学习示例,有详细的代码和说明文档
一、系统概述
本系统基于CoppeliaSim(4.0/4.1版本)与MATLAB开发,集成Petercork机器人工具箱,实现机械臂两大核心功能:墙面绘图轨迹控制与物体码垛运动控制。系统通过MATLAB与CoppeliaSim的远程API通信,完成轨迹规划、运动控制、状态反馈等全流程自动化操作,适用于机器人运动控制算法验证、工业场景仿真预演等场景。
系统核心优势在于模块化设计,将轨迹规划、通信交互、运动执行等功能拆分为独立模块,支持快速适配不同类型机械臂模型与任务场景;同时通过笛卡尔空间轨迹规划(Cartesian Trajectory Planning)与关节空间轨迹规划(Joint Trajectory Planning)结合,兼顾运动精度与平滑性,满足高精度仿真需求。
二、核心依赖与环境配置
1. 基础软件环境
| 软件/工具 | 版本要求 | 作用说明 |
|---|---|---|
| CoppeliaSim | 4.0/4.1 | 机器人仿真平台,提供机械臂模型、物理引擎与远程API接口 |
| MATLAB | R2018b及以上 | 轨迹规划算法实现、数据处理与CoppeliaSim通信控制 |
| Petercork机器人工具箱 | 适配版本 | 提供机器人运动学计算、轨迹插值等基础函数支持 |
2. 通信架构
系统采用“MATLAB客户端- CoppeliaSim服务端”架构,通过remoteApi库建立TCP/IP通信(默认端口19999),实现以下数据交互:
- 控制指令:MATLAB向CoppeliaSim发送机械臂目标位姿(位置+姿态)、 gripper开合指令;
- 状态反馈:CoppeliaSim向MATLAB返回机械臂当前位姿、物体位置等状态数据;
- 同步控制:通过
simxopmodeblocking(阻塞模式)确保指令执行顺序,避免运动冲突。
三、功能模块详解
(一)通用核心模块:轨迹规划与通信交互
1. 笛卡尔空间轨迹规划模块(CartesianTrajPlan)
功能定位:实现机械臂从“起始位姿”到“目标位姿”的笛卡尔空间平滑运动规划,保证末端执行器沿直线或指定路径运动,适用于绘图、精密装配等需要位置精度的场景。
核心逻辑:
- 位姿转换:将输入的欧拉角(Euler Angle)转换为旋转矩阵,结合位置坐标构建4×4齐次变换矩阵(Homogeneous Transformation Matrix),描述机械臂末端的空间位姿;
- 轨迹时间计算:根据起始与目标位置的欧氏距离、预设运动速度,计算轨迹总时长,确保运动速度稳定;
- 轨迹插值:通过
ctraj函数生成连续的轨迹点序列(默认时间步长0.05s),保证位置与姿态的平滑过渡; - 数据输出:将插值后的轨迹点转换为“欧拉角+位置”格式,用于后续运动控制。
关键特性:
- 支持“位置+姿态”同步规划,避免机械臂运动过程中姿态突变;
- 可通过调整
vel参数(运动速度)适配不同任务对速度的需求(如绘图时低速保证精度,码垛时高速提升效率)。
2. 远程API通信模块(remApi)
功能定位:封装CoppeliaSim远程API接口,提供MATLAB与CoppeliaSim的标准化通信函数,隐藏底层数据格式转换细节,降低上层功能开发复杂度。
核心接口分类:
| 接口类型 | 代表函数 | 功能说明 |
|---|---|---|
| 连接管理 | simxStart/simxFinish |
建立/关闭与CoppeliaSim的TCP连接,设置超时时间与通信周期 |
| 物体状态获取 | simxGetObjectPosition/simxGetObjectOrientation |
获取指定物体(如机械臂末端、目标物体)的位置坐标与欧拉角姿态 |
| 物体状态控制 | simxSetObjectPosition/simxSetObjectOrientation |
设置目标物体(如机械臂末端目标点)的位置与姿态,驱动机械臂运动 |
| 信号控制 | simxSetIntegerSignal |
发送整数信号(如gripper开合指令:0为打开,1为闭合) |
通信可靠性保障:
- 采用
simxopmodeblocking模式确保指令执行完成后再返回结果,避免数据丢失; - 内置连接状态检查(如
clientID >= 0判断连接是否成功),异常时终止流程并释放资源。
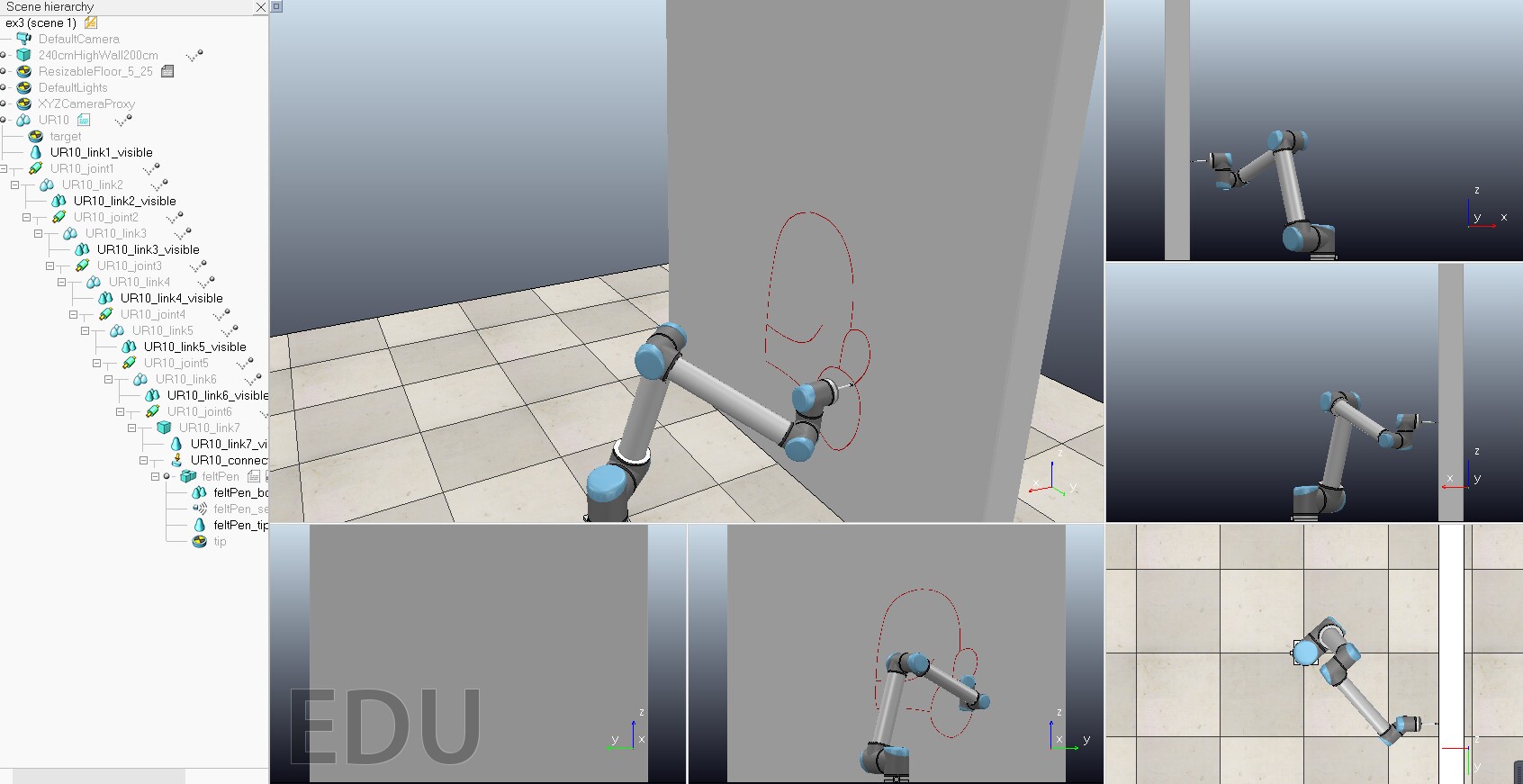
(二)墙面绘图功能模块
1. 功能概述
基于预设的轨迹文件(CSV格式,存储绘图路径的坐标点),控制机械臂末端沿路径运动,实现“提笔-绘图-抬笔-复位”全流程自动化,支持多组路径连续绘图(如10组路径循环执行)。
2. 核心流程(drawPath函数)
- 初始化阶段:
- 建立MATLAB与CoppeliaSim的通信连接,获取绘图目标点(target)的初始位姿(位置+姿态);
- 读取CSV轨迹文件,解析绘图路径的坐标点序列;
- 针对特殊路径文件(如path7.csv、path8.csv)调整运动速度(从0.5提升至0.6),适配复杂路径的绘图效率。
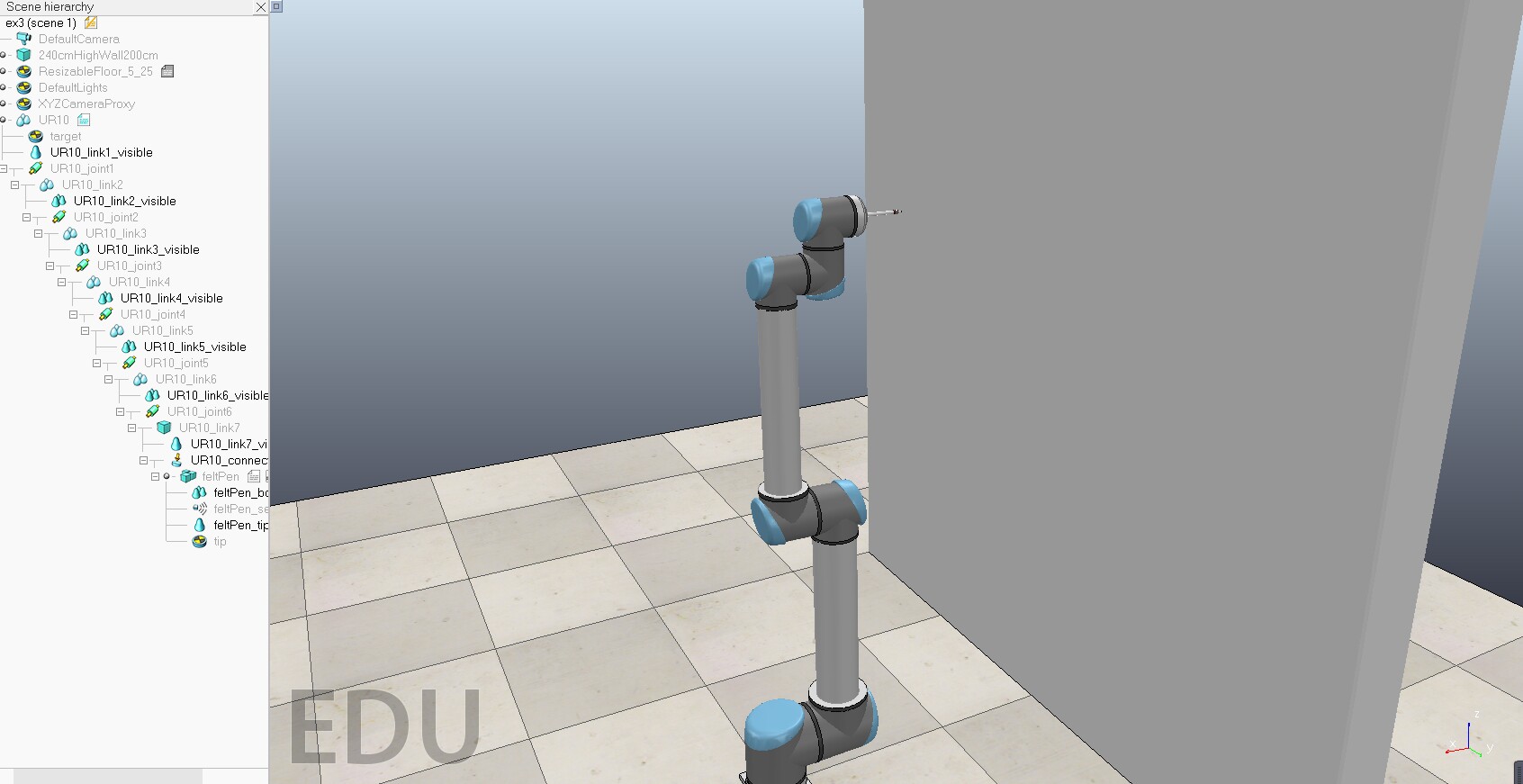
- 绘图准备:抬笔移动至路径起点:
- 规划从“初始位姿”到“路径起点上方20mm处”的轨迹(避免机械臂与墙面碰撞);
- 通过CartesianTrajPlan生成平滑轨迹,控制机械臂移动至起点上方。
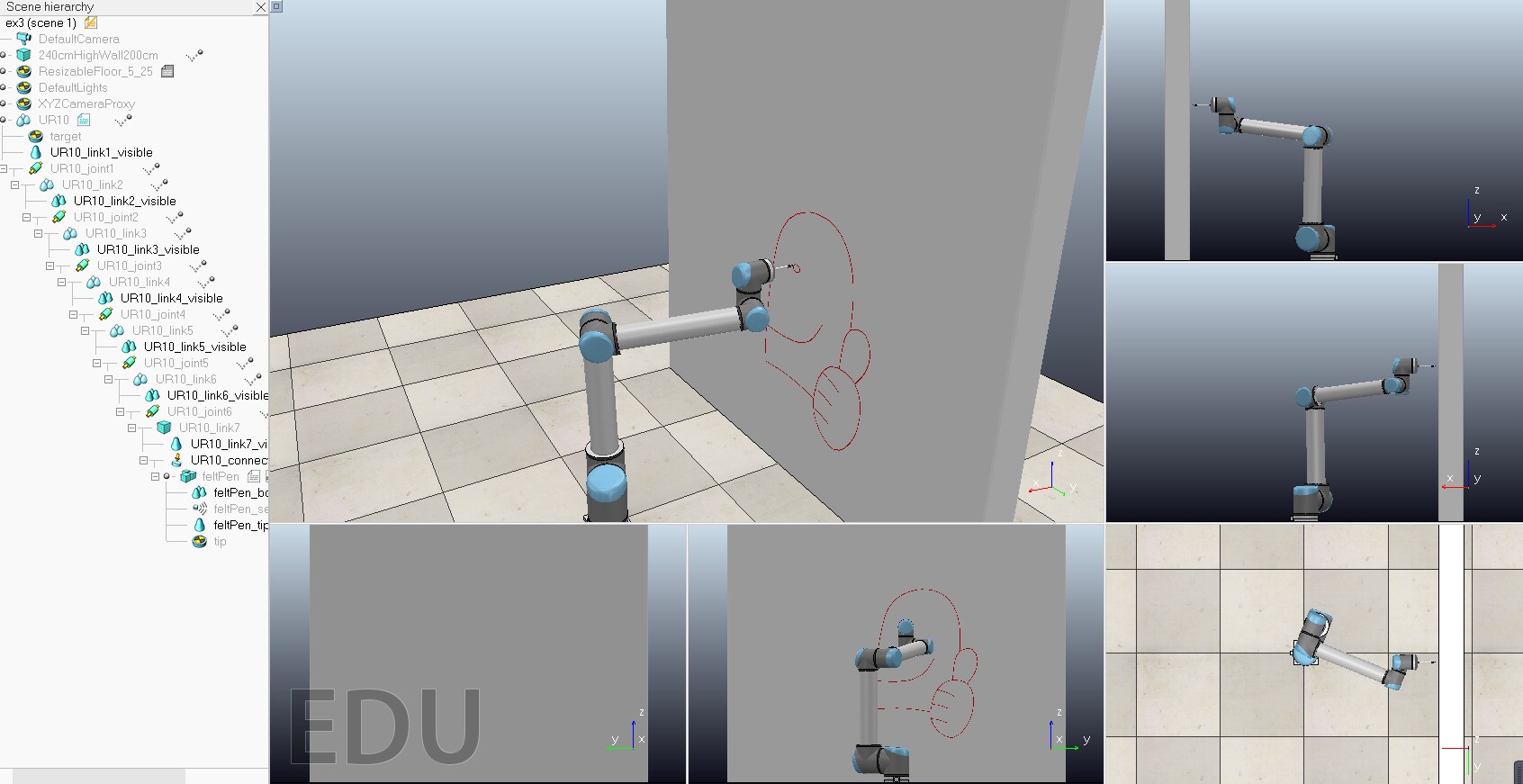
- 绘图执行:沿路径运动:
- 采用关节空间轨迹规划(jtraj函数),生成路径点之间的关节插值序列,确保机械臂末端严格沿CSV文件中的路径运动;
- 每步运动后暂停0.02s,保证绘图精度(避免因运动过快导致轨迹偏移)。
- 绘图收尾:抬笔复位:
- 绘图完成后,规划从“路径终点”到“终点上方20mm处”的轨迹(抬笔动作);
- 进一步规划从“终点上方”回到“初始位姿”的轨迹,完成一次绘图循环。
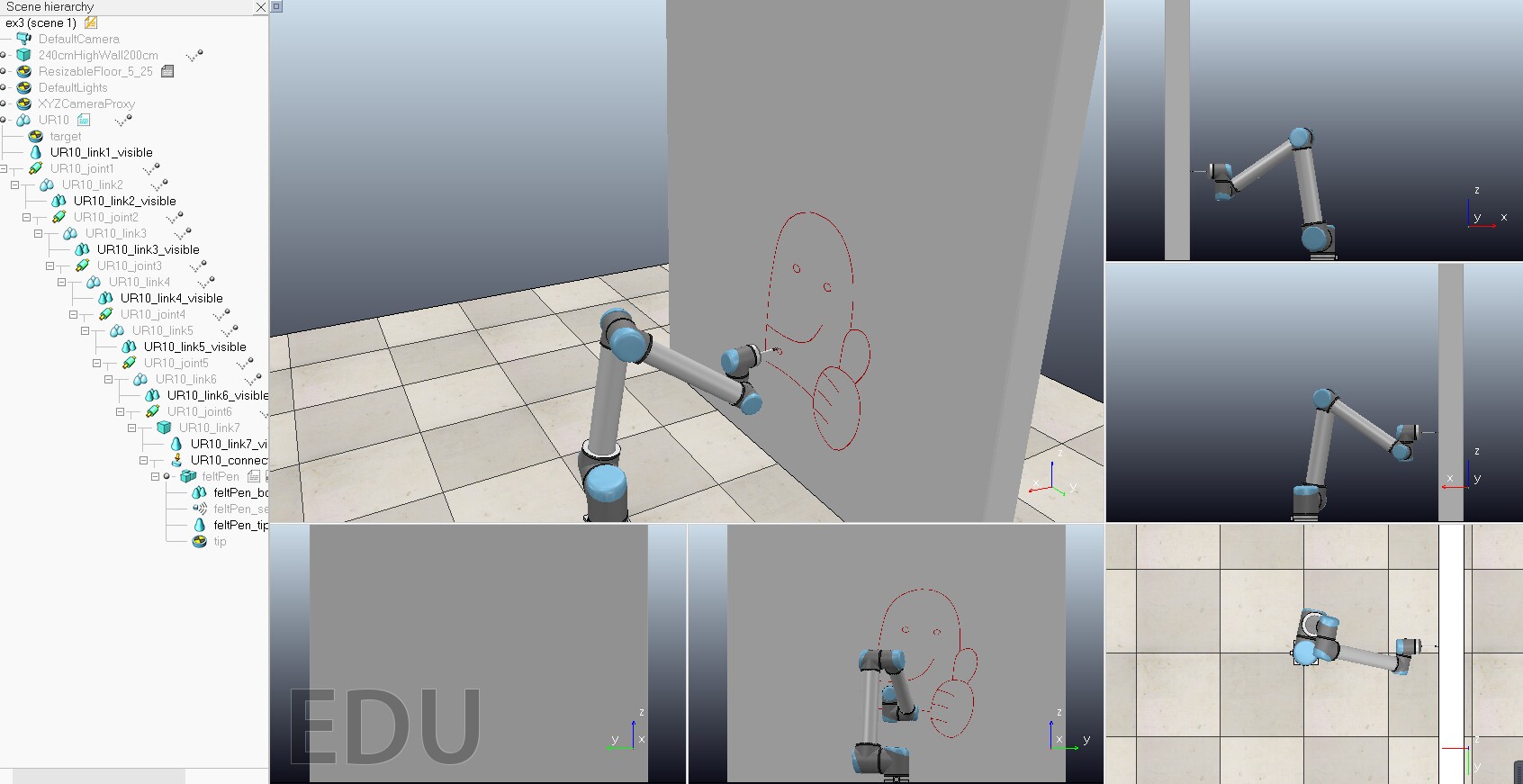
3. 多路径批量执行(motionFlow_ex3)
通过循环调用drawPath函数,依次加载path1.csv至path10.csv文件,实现多组路径连续绘图,循环间隔2s(确保前一组路径执行完成后再启动下一组)。
(三)物体码垛功能模块
1. 功能概述
控制机械臂完成“抓取物体-移动至目标位置-放置物体”的码垛流程,支持5个立方体(Cuboid0~Cuboid4)的有序码垛,适配不同目标位置的姿态调整需求(如水平放置、堆叠放置)。
2. 核心流程(motionFlow_ex2函数)
- 初始化阶段:
- 建立通信连接,获取机械臂目标点(target)、5个立方体的句柄(Handle),记录机械臂初始位姿;
- 定义每个立方体的抓取姿态(如target1Eul = [-pi/2, 0, -pi/2])与目标放置位置(如[0.925, 0, 0.03])。
- 单物体码垛子流程(以第一个物体为例):
- 步骤1:移动至物体上方:规划从初始位姿到“物体上方75mm处”的轨迹,速度0.5m/s,避免碰撞;
- 步骤2:打开gripper:通过simxSetIntegerSignal发送信号“0”,控制机械臂夹爪打开;
- 步骤3:抓取物体:低速(0.1m/s)下降至物体位置,发送信号“1”闭合gripper,确保抓取稳固;
- 步骤4:抬升物体:低速上升75mm,避免物体与周围环境碰撞;
- 步骤5:移动至目标位置:规划从“物体上方”到“目标位置上方”的轨迹,同步调整姿态(如从抓取姿态转换为放置姿态[0, -pi/2, 0]);
- 步骤6:放置物体:低速下降至目标位置(如z=0.03m),发送信号“0”打开gripper,完成放置;
- 步骤7:复位抬升:上升至目标位置上方75mm,为下一次抓取准备。
- 多物体码垛扩展:
- 针对5个物体分别定义不同的目标位置(如前两个物体水平排列,后三个物体堆叠);
- 每次抓取后更新机械臂的“起始位姿”为上一次的“结束位姿”,避免重复回到初始位姿,提升码垛效率。
四、关键技术特性与注意事项
1. 轨迹规划策略适配
| 任务类型 | 轨迹规划方式 | 选择原因 |
|---|---|---|
| 墙面绘图 | 关节空间轨迹规划(jtraj) | 需严格沿预设路径运动,关节插值可保证路径精度 |
| 码垛移动 | 笛卡尔空间轨迹规划(ctraj) | 需从“当前位姿”快速移动至“目标位姿”,笛卡尔插值更高效 |
2. 运动安全性保障
- 碰撞避免:所有“靠近物体”的动作均采用低速(0.1m/s),且在物体上方预留安全距离(如75mm、20mm);
- 状态同步:通过
pause函数控制运动间隔,确保gripper开合、位姿调整等动作执行完成后再进入下一步; - 资源释放:每个功能流程结束后调用
simxFinish关闭通信连接,避免占用CoppeliaSim资源。
3. 参数调整建议
- 运动速度(vel):绘图场景建议0.1~0.5m/s(保证精度),码垛场景建议0.25~0.5m/s(平衡效率与稳定性);
- 时间步长:轨迹插值时间步长建议0.02~0.05s(过小会增加计算量,过大可能导致运动卡顿);
- gripper信号:需确保CoppeliaSim中机械臂模型的gripper控制信号与MATLAB一致(默认“0=打开,1=闭合”)。
五、系统扩展方向
- 模型适配:通过修改
simxGetObjectHandle的物体名称(如将“Cuboid”改为“Box”),适配不同形状的物体(如圆柱体、长方体); - 路径自定义:通过编辑CSV轨迹文件,支持任意形状的绘图路径(如字母、图形);
- 视觉集成:增加CoppeliaSim视觉传感器(Vision Sensor)数据读取功能,实现“视觉定位-自动抓取”的闭环控制;
- 多机械臂协同:扩展通信接口,支持多台机械臂同时工作(如一台抓取、一台放置),提升码垛效率。
六、总结
本系统通过模块化设计实现了机械臂“绘图”与“码垛”两大核心功能,兼顾运动精度、稳定性与扩展性。基于CoppeliaSim的物理引擎与MATLAB的算法能力,可快速验证机器人运动学算法、优化任务流程,为工业机器人的实际应用提供仿真支撑。使用时需注意软件版本适配、通信参数配置与运动安全距离设置,确保系统稳定运行。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐

 34
34 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)