西门子PLC伺服大型20轴程序modbus通讯RS232通讯MES通讯气缸,通讯,机械手,模拟量等
最近在搞一个西门子PLC的项目,涉及到20多个轴的控制,100多个气缸,还有两台机器人。触摸屏和PLC之间的通讯是通过以太网实现的,通讯协议用的是Modbus TCP。总的来说,这个项目涉及到的技术点非常多,从PTO控制到Modbus通讯,再到MES系统集成,每一个部分都需要仔细设计和调试。西门子PLC伺服大型20轴程序modbus通讯RS232通讯MES通讯气缸,通讯,机械手,模拟量等,各种FB
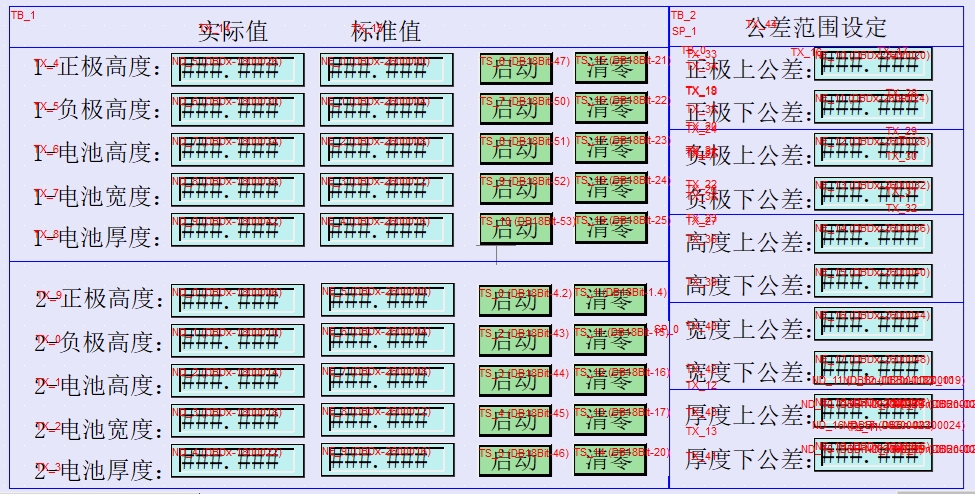
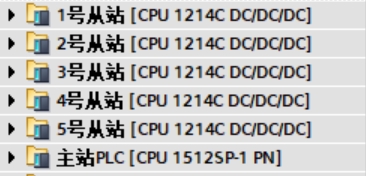
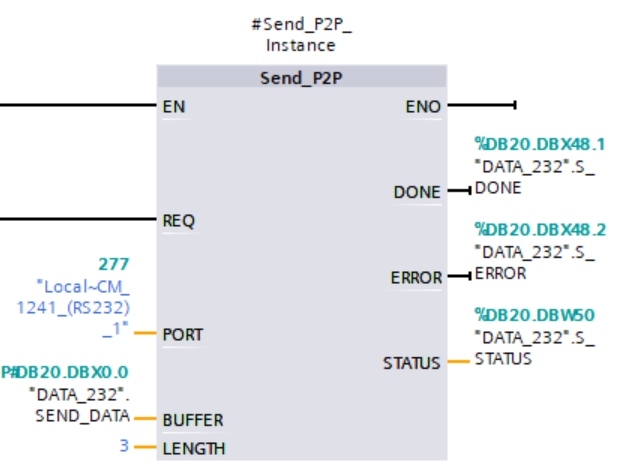
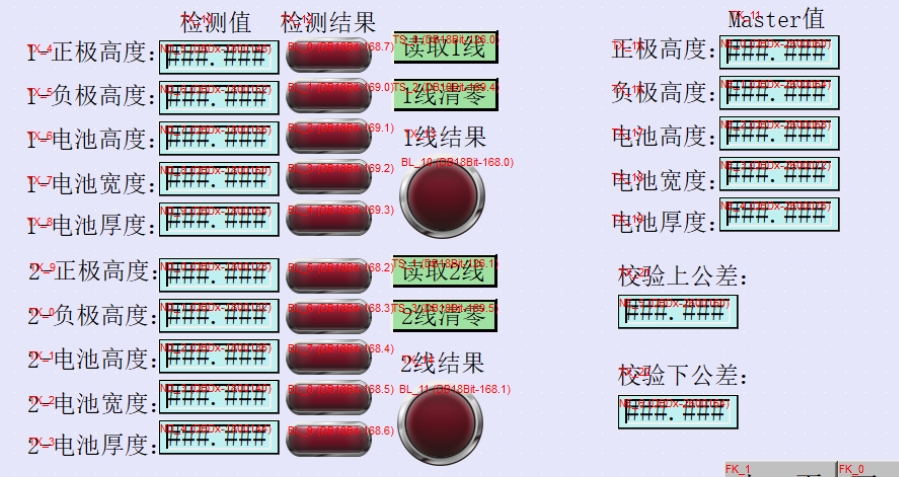
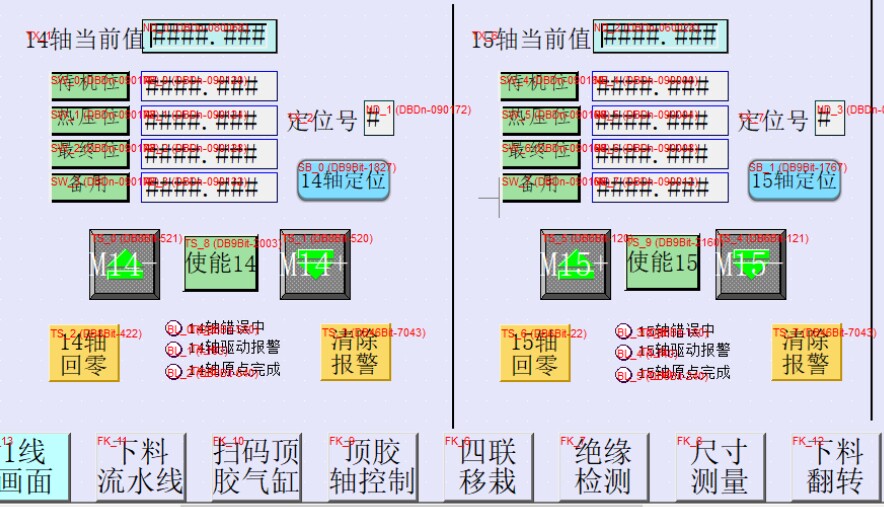
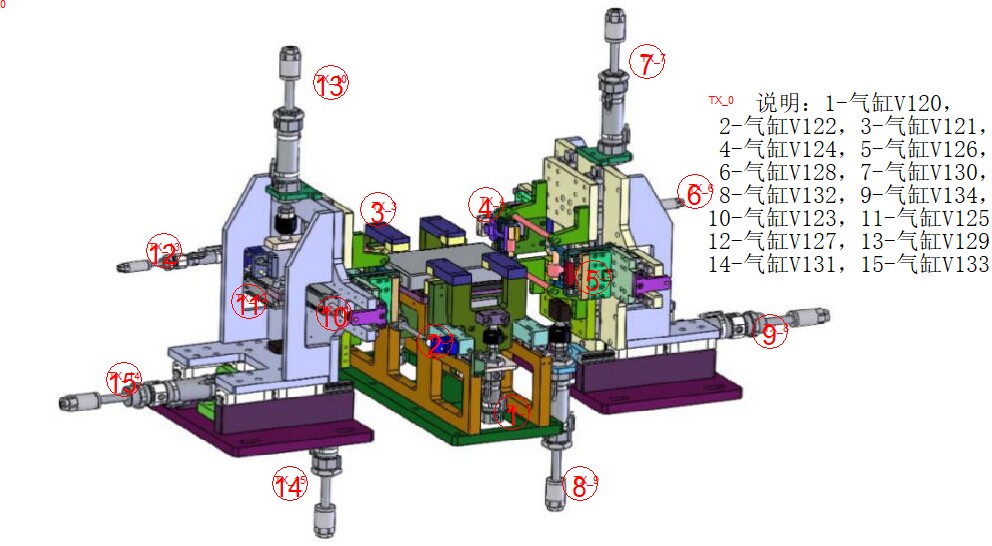
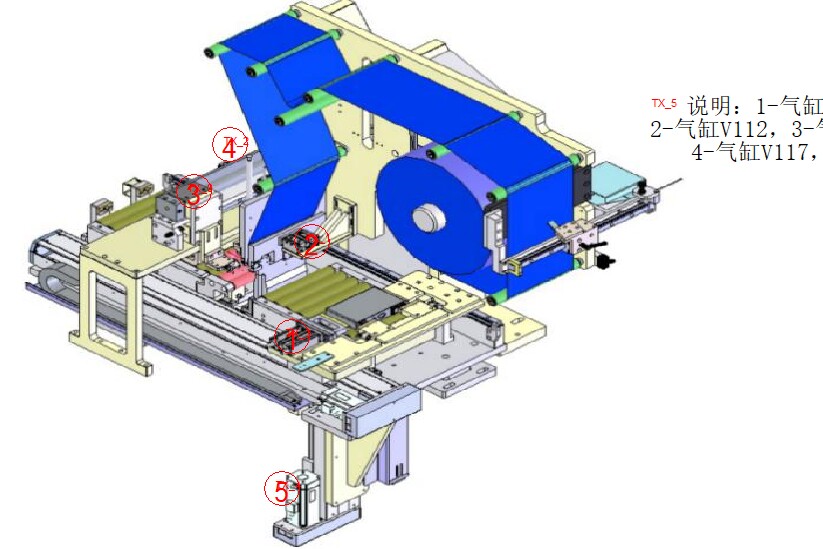
西门子PLC伺服大型20轴程序modbus通讯RS232通讯MES通讯气缸,通讯,机械手,模拟量等,各种FB块 PTO控制20多个轴,100多个气缸,控制2台机器人。 5台PLC智能IO通讯,ModbusRTU通讯轮询,完整威纶通触摸屏程序, 5台西门子1200PLC+一台1500PLC,是学习西门子PLC通信、伺服好帮手 程序结构分明,注释详细,有机械结构图,威纶通触摸屏程序,开关机操作,故障处理,机械结构图全写入触摸屏的。 主站和MES系统通讯,1号2号从站和绝缘测试仪器RS-232通讯,4号从站Modbus 总线通讯读取4个智能传感器值 5号从站Modbus 总线和3个温控器通讯
最近在搞一个西门子PLC的项目,涉及到20多个轴的控制,100多个气缸,还有两台机器人。整个系统用了5台1200PLC和一台1500PLC,通讯方式也是五花八门,Modbus RTU、RS232、MES通讯都用上了。说实话,这种规模的系统,光是通讯部分就够喝一壶的。
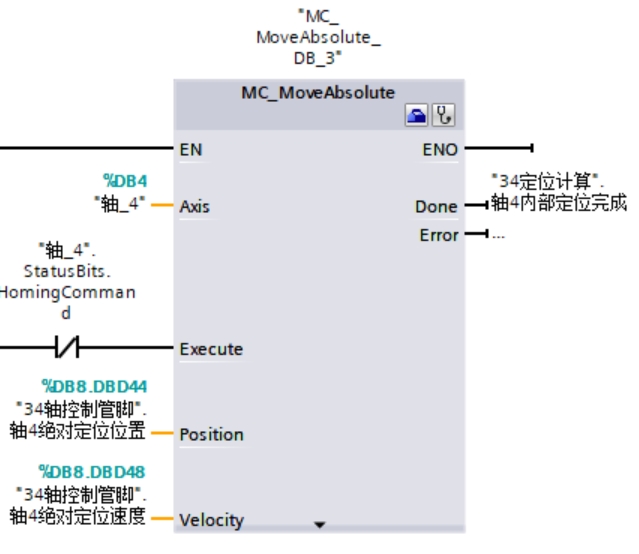
先说说PTO控制20多个轴的部分。PTO(Pulse Train Output)是西门子PLC里用来控制步进电机或者伺服电机的常用方式。每个轴的控制逻辑都封装在FB块里,这样不仅方便调用,还能让程序结构更清晰。比如下面这个FB块,用来控制一个轴的运动:
FB_AxisControl
VAR_INPUT
Start : BOOL; // 启动信号
Stop : BOOL; // 停止信号
Position : INT; // 目标位置
END_VAR
VAR_OUTPUT
Done : BOOL; // 完成信号
Error : BOOL; // 错误信号
END_VAR
VAR
CurrentPosition : INT; // 当前位置
Moving : BOOL; // 运动状态
END_VAR
IF Start AND NOT Moving THEN
Moving := TRUE;
// 发送PTO脉冲
PTO_Send(Position);
END_IF
IF Moving AND PTO_Done THEN
Moving := FALSE;
Done := TRUE;
END_IF
IF Stop THEN
PTO_Stop;
Moving := FALSE;
Error := TRUE;
END_IF这个FB块的核心逻辑就是通过PTO发送脉冲来控制轴的运动。PTOSend和PTOStop是西门子PLC内置的函数,用来控制PTO输出。PTO_Done是一个标志位,表示PTO脉冲发送完成。通过这种方式,可以很方便地控制多个轴的运动。
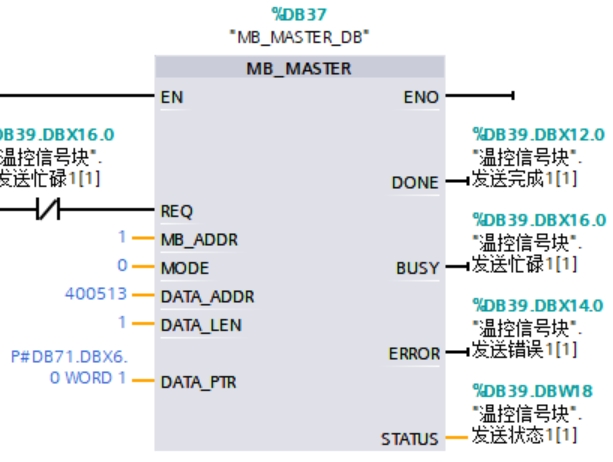
接下来是Modbus RTU通讯的部分。Modbus RTU是一种常用的工业通讯协议,适合在RS485或者RS232上使用。在这个项目里,Modbus RTU用来和智能传感器、温控器通讯。比如下面这段代码,用来读取一个智能传感器的值:
FB_ModbusRTU_Read
VAR_INPUT
Start : BOOL; // 启动信号
SlaveID : BYTE; // 从站ID
Register : WORD; // 寄存器地址
END_VAR
VAR_OUTPUT
Value : INT; // 读取的值
Done : BOOL; // 完成信号
Error : BOOL; // 错误信号
END_VAR
VAR
Buffer : ARRAY[0..7] OF BYTE; // 数据缓冲区
Status : INT; // 通讯状态
END_VAR
IF Start THEN
// 发送Modbus RTU读取命令
ModbusRTU_Send(SlaveID, 0x03, Register, 1);
END_IF
IF ModbusRTU_Receive(Buffer, Status) THEN
IF Status = 0 THEN
Value := Buffer[3] * 256 + Buffer[4]; // 解析数据
Done := TRUE;
ELSE
Error := TRUE;
END_IF
END_IF这个FB块的核心逻辑是通过Modbus RTU协议读取从站的数据。ModbusRTUSend和ModbusRTUReceive是西门子PLC内置的函数,用来发送和接收Modbus RTU数据帧。Buffer是一个数据缓冲区,用来存储接收到的数据。通过这种方式,可以很方便地读取多个从站的数据。
再来说说MES通讯的部分。MES(Manufacturing Execution System)是制造执行系统,用来管理和监控生产过程。在这个项目里,主站和MES系统通过以太网通讯。通讯协议用的是西门子自家的S7协议,通讯部分也是封装在FB块里。比如下面这段代码,用来向MES系统发送生产数据:
FB_MES_Send
VAR_INPUT
Start : BOOL; // 启动信号
Data : ARRAY[0..99] OF BYTE; // 生产数据
END_VAR
VAR_OUTPUT
Done : BOOL; // 完成信号
Error : BOOL; // 错误信号
END_VAR
VAR
Status : INT; // 通讯状态
END_VAR
IF Start THEN
// 发送数据到MES系统
MES_Send(Data, Status);
END_IF
IF Status = 0 THEN
Done := TRUE;
ELSE
Error := TRUE;
END_IF这个FB块的核心逻辑是通过S7协议向MES系统发送数据。MES_Send是西门子PLC内置的函数,用来发送数据到MES系统。Status是一个状态码,用来表示通讯是否成功。通过这种方式,可以很方便地向MES系统发送生产数据。
最后说说威纶通触摸屏的部分。威纶通触摸屏是用来操作和监控整个系统的。触摸屏程序里包含了开关机操作、故障处理、机械结构图等信息。触摸屏和PLC之间的通讯是通过以太网实现的,通讯协议用的是Modbus TCP。触摸屏程序里还集成了机械结构图,方便操作人员查看设备状态。
总的来说,这个项目涉及到的技术点非常多,从PTO控制到Modbus通讯,再到MES系统集成,每一个部分都需要仔细设计和调试。不过,通过合理的程序结构和详细的注释,整个系统的开发过程还是比较顺利的。如果你也在学习西门子PLC,这个项目绝对是一个很好的参考。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐
 9
9 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)