探索Delta机械臂运动控制卡的无限可能
delta机械臂,delta机器人,运动控制器,运动控制卡本卡采用前瞻运动轨迹规划,运动采用G代码指令编程,具有G5三维空间的圆弧插补,空间直线插补功能,子程序编程功能,逻辑判断语句功能,示教编程功能(支持手柄),变量位置编程功能,动态PWM激光输出功能(兼容舵机控制信号),动态频率脉冲输出功能,通用输入输出功能。可极简单的实现绘图雕刻,3维激光切割功能。轨迹图形可xy平面整体旋转功能。可利用变量
delta机械臂,delta机器人,运动控制器,运动控制卡 本卡采用前瞻运动轨迹规划,运动采用G代码指令编程,具有G5三维空间的圆弧插补,空间直线插补功能,子程序编程功能,逻辑判断语句功能,示教编程功能(支持手柄),变量位置编程功能,动态PWM激光输出功能(兼容舵机控制信号),动态频率脉冲输出功能,通用输入输出功能。 可极简单的实现绘图雕刻,3维激光切割功能。 轨迹图形可xy平面整体旋转功能。 可利用变量位置,获取外部坐标要求,可轻松配合机器视觉。 支持探针功能,测平面,测外形等。 可设置4组平移工件坐标系,2组参考原点。 新增2组空间旋转工件坐标系,支持任意图形直接空间旋转。 卡上一键脱机RAM区运行功能。 2M程序容量。 断电后位置记忆,变量坐标位置记忆,计数器记忆。 伺服报警输入功能。 具有usb cdc 通讯方式 4个编码器接入可作运动校核,使低成本机器人也可以确保运动定位精度 回原点可选择设定,更方便机器人标定。 具有逻辑运算指令,兼具了简单PLC功能 modbus rtu 从站通讯协议,方便用户自主开发。 4轴拖曳示教功能(可定制5个轴拖曳示教) 本delta运动卡支持6轴,因此工具端更灵活。 新增专用码垛指令,专用码垛拖动示教指令,极简单的编程方式。 可扩展以太网或wifi通讯 真正的逆运动控制卡,自动速度轨迹规划。 脚本形式指令,二次开发极容易,不需要库函数。
在自动化控制领域,Delta机械臂和Delta机器人一直备受瞩目,而一款强大的运动控制卡更是它们实现精准高效运动的关键。今天就来聊聊这款超厉害的Delta运动控制卡,看看它究竟有哪些逆天的功能。
一、强大的编程与插补功能
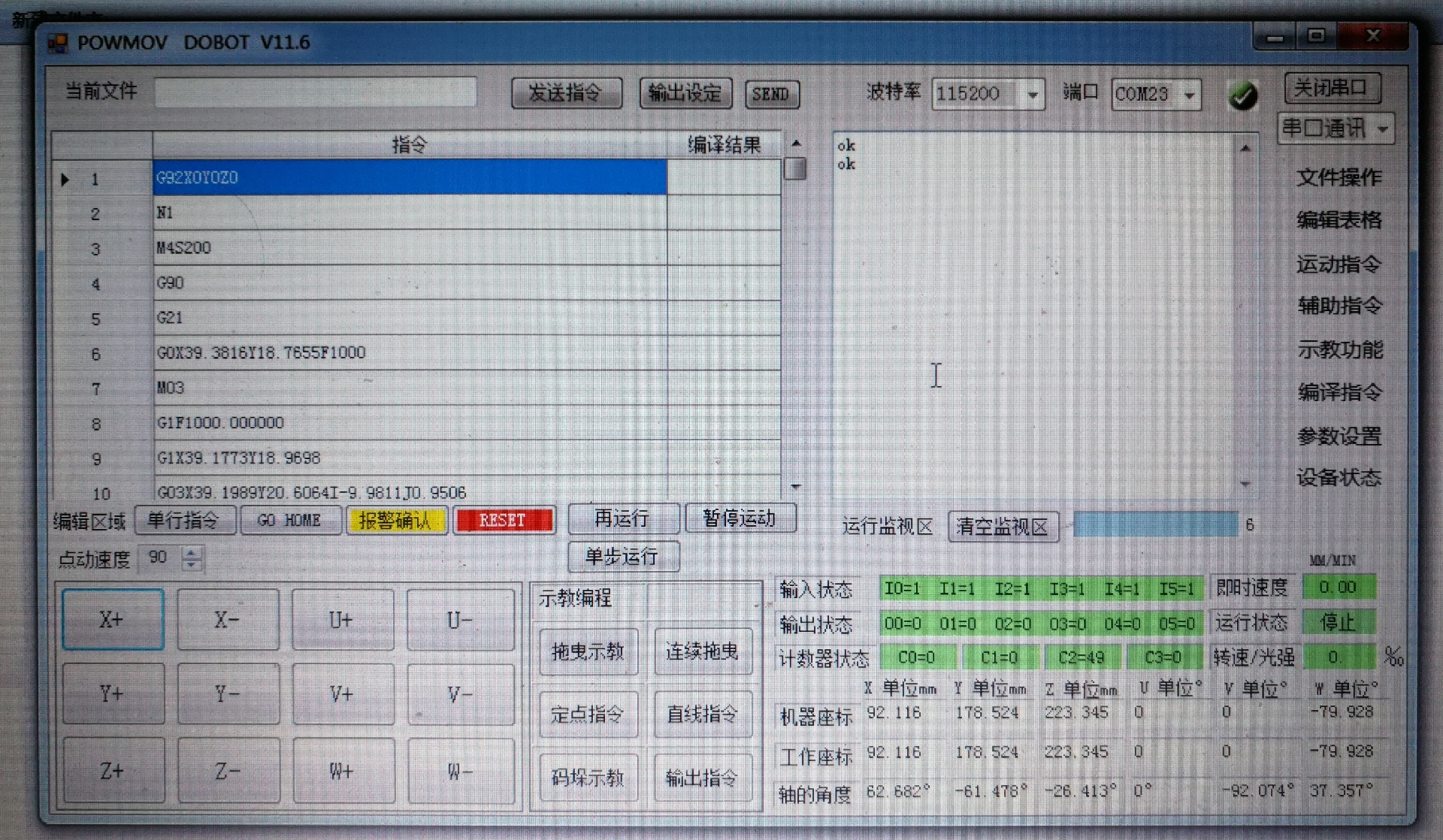
这款卡采用前瞻运动轨迹规划,并且运动编程基于大家熟悉的G代码指令。像G5三维空间的圆弧插补和空间直线插补功能,简直是为复杂轨迹运动而生。比如说,在进行三维激光切割任务时,我们可能会用到这样的G代码示例:
G01 X10 Y20 Z30 F1000 ; 直线插补到坐标 (10, 20, 30),速度1000mm/min
G02 X20 Y30 Z40 I5 J5 K5 F800 ; 顺时针圆弧插补,圆心相对于起点偏移量 (5, 5, 5),终点 (20, 30, 40),速度800mm/min这两条简单的G代码,就能让Delta机械臂按照设定的路径精确移动,实现复杂的切割形状。同时,它还具备子程序编程功能,就像我们在写代码时把一些常用功能封装成函数一样。当机械臂需要重复执行某些特定动作序列时,子程序就能派上用场,大大提高编程效率。
逻辑判断语句功能也非常实用,它允许控制卡根据不同的条件执行不同的操作。比如在一个检测任务中,可能会这样写:
IF [SENSOR1 == 1] THEN
G01 X100 Y100 Z100 ; 如果传感器1检测到信号,移动到指定位置
ELSE
G01 X200 Y200 Z200 ; 否则,移动到另一个位置
ENDIF这种逻辑判断让Delta机械臂能根据实际情况做出智能决策。
二、多样化的编程与示教方式
示教编程功能(还支持手柄操作)简直是现场调试和编程的福音。操作人员可以通过手柄手动操纵机械臂到达各个需要的位置,控制卡会自动记录这些位置信息,生成相应的运动程序。变量位置编程功能则更灵活,能够获取外部坐标要求,轻松配合机器视觉系统。例如,当机器视觉识别到目标物体的坐标后,通过变量赋值的方式传递给控制卡:
# 获取视觉系统传递的X坐标
VAR1 = GET_VISION_X()
# 获取视觉系统传递的Y坐标
VAR2 = GET_VISION_Y()
G01 X[VAR1] Y[VAR2] Z10 ; 移动到视觉识别的位置高度10处这样Delta机械臂就能快速响应视觉系统的反馈,实现更智能的操作。
三、丰富的输出与控制功能
动态PWM激光输出功能(还兼容舵机控制信号)和动态频率脉冲输出功能,为Delta机械臂连接各种外部设备提供了便利。比如说,在绘图雕刻任务中,PWM激光输出可以控制激光的强度,实现不同深度的雕刻效果。通用输入输出功能则能连接更多的传感器和执行器,扩展机械臂的功能。
四、图形与坐标系相关功能
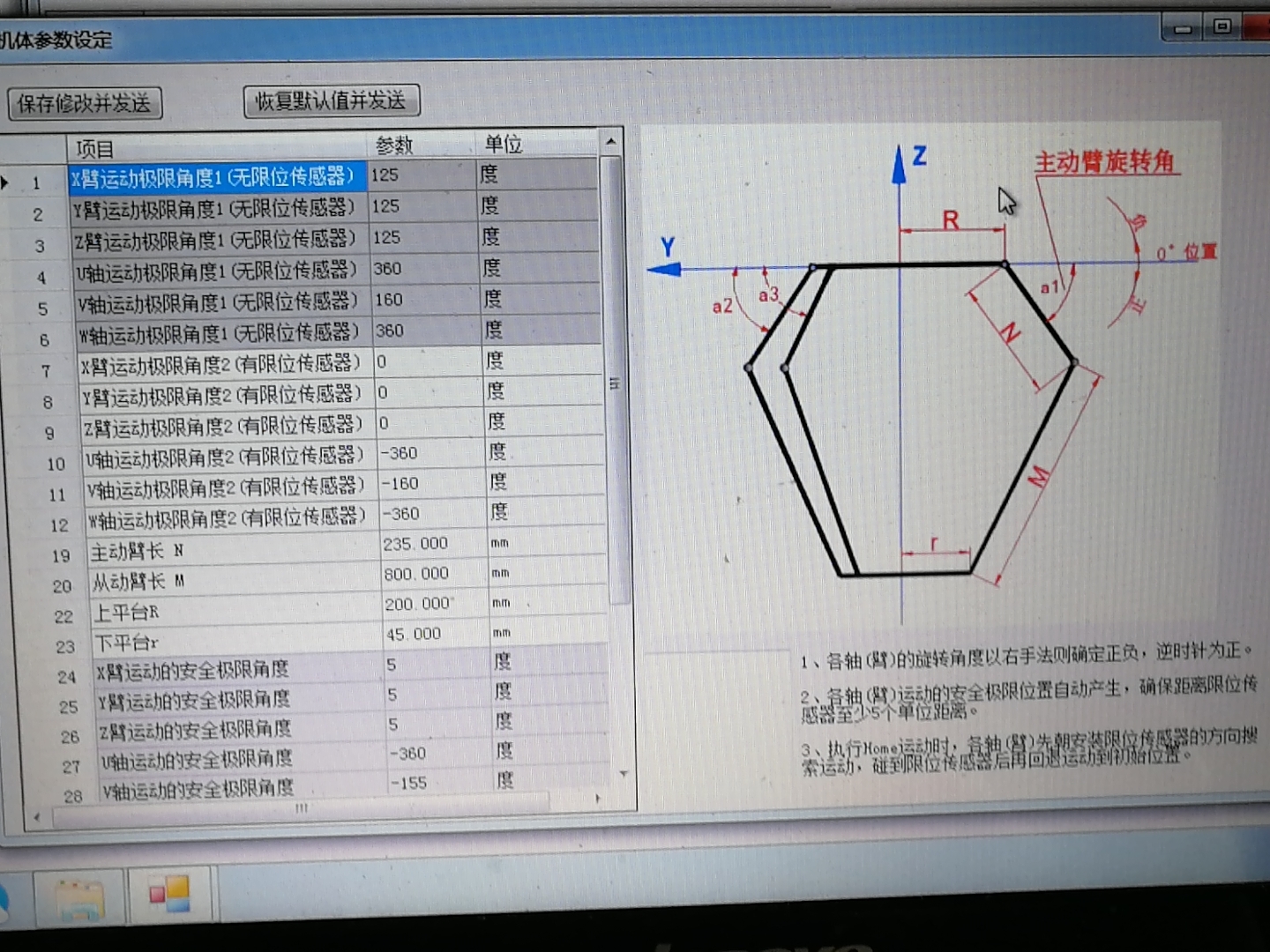
轨迹图形可xy平面整体旋转功能,在一些需要特定角度摆放的任务中非常实用。比如在进行平面图形雕刻时,如果需要将图案旋转一定角度,通过简单的指令就能实现。
不仅如此,它还能设置4组平移工件坐标系和2组参考原点,新增的2组空间旋转工件坐标系更是强大,支持任意图形直接空间旋转。这意味着无论是简单的二维操作还是复杂的三维空间运动,都能轻松应对。例如,在进行复杂的3D打印任务时,通过灵活设置坐标系和旋转图形,能够优化打印路径,提高打印质量。
五、便捷的运行与存储功能
卡上一键脱机RAM区运行功能,让Delta机械臂在脱离上位机的情况下也能独立运行存储在控制卡中的程序,这对于一些需要长时间稳定运行的任务非常重要。2M的程序容量足够存储大量复杂的运动程序。而且,断电后位置记忆,变量坐标位置记忆,计数器记忆功能,保证了即使意外断电,再次上电后机械臂能迅速恢复到断电前的状态,继续工作。
六、其他实用功能
伺服报警输入功能能够实时监测伺服系统的状态,一旦出现异常及时反馈,保障机械臂的安全运行。usb cdc通讯方式提供了稳定快速的数据传输通道,方便上位机与控制卡之间的通信。4个编码器接入可作运动校核,对于低成本机器人来说,能确保运动定位精度,让Delta机械臂在有限的成本下实现高精度运动。回原点可选择设定,更是方便了机器人标定,使调试过程更加简单快捷。
逻辑运算指令让这款控制卡兼具了简单PLC功能,像一些基本的与、或、非逻辑运算都能轻松实现,满足更多复杂控制逻辑的需求。modbus rtu从站通讯协议,方便用户自主开发,使得控制卡能更好地融入各种自动化系统中。
4轴拖曳示教功能(还可定制5个轴拖曳示教)以及支持6轴控制,让工具端更加灵活,能够适应更多不同类型的任务。新增的专用码垛指令和专用码垛拖动示教指令,采用极简单的编程方式,大大降低了码垛任务的编程难度。而且,它还可扩展以太网或wifi通讯,进一步提升了远程控制和数据交互的能力。
这款Delta运动控制卡作为真正的逆运动控制卡,自动速度轨迹规划,加上脚本形式指令,二次开发极容易,不需要库函数,为广大开发者和工程师提供了无限的创造空间,助力Delta机械臂和Delta机器人在各个领域发挥更大的作用。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐


 16
16 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)