Metasurface-enhanced light detection and ranging technology(超表面增强激光雷达技术)解读---Nature communications
摘要:本文提出一种超表面增强的激光雷达技术,通过级联声光偏转器(AOD)与被动超表面,实现了150°×150°超大视场与MHz级扫描速度(单轴6MHz/双轴10MHz)的突破性结合。系统采用仿生视觉设计,利用零级光束(高分辨率小视场)和一级光束(低分辨率大视场)实现多区域同步成像,模拟人类中央凹与外周视觉特性。实验验证显示该系统支持3401fps高速动态成像,能精准捕捉旋转斩波器等运动目标。基于有
主要看点
技术方案的突破性融合:提出将超快小视场的声光偏转器(AOD)与大面积被动超表面级联,成功将 AOD 仅 2°×2° 的窄视场扩展至 150°×150° 的超大视场,同时保留 AOD 的 MHz 级超快扫描速度,解决了传统激光雷达中 “高速扫描与大视场难以兼顾” 的核心矛盾。
仿生视觉的多区域成像能力:通过设计特殊超表面实现双模式成像 —— 零级光束提供高分辨率小视场(类似人类中央凹视觉),一级光束提供低分辨率大视场(类似人类外周视觉),首次在激光雷达中实现同时获取不同空间分辨率的多区域图像,为自动驾驶等场景的感知决策提供更贴近人类视觉的信息。
高性能指标的实验验证:实验证明该系统可实现 MHz 级扫描速度(单轴 6 MHz、双轴 10 MHz),150° 超大视场的 2D/3D 成像,以及高达 3401 fps 的时间序列成像,能精准捕捉高速运动目标(如旋转斩波器)的动态信息,性能较传统技术提升约 2 个数量级。
超表面设计的灵活性与可扩展性:基于有效折射率(ERI)设计的径向对称超表面,通过调控纳米柱结构实现光束偏转,且视场仅由超表面相位函数决定,理论上可按需扩展;采用纳米压印 lithography 制备厘米级超表面,兼顾性能与可制造性,为工业化应用提供可能。
应用场景的广泛潜力:该技术在先进驾驶辅助系统(ADAS)、机器人感知、高速动态成像等领域展现出颠覆性潜力,例如可同时实现远距离高精度探测与大范围环境监测,结合学习算法有望提升自主系统的决策效率
文章目录
目录
Renato Juliano Martins¹, Emil Marinov¹, M. Aziz Ben Youssef¹, Christina Kyrou¹, Mathilde Joubert¹, Constance Colmagro¹⁻², Valentin Gâté², Colette Turbil², Pierre-Marie Coulon¹, Daniel Turover², Samira Khadir¹, Massimo Giudici³, Charalambos Klitis⁴, Marc Sorel⁴⁻⁵ & Patrice Genevet¹
1.Université Cote d’Azur, CNRS, CRHEA, Rue Bernard Gregory, Sophia Antipolis, 06560 Valbonne, France
2.NAPA-Technologies, 74160 Archamps, France
3.Université Côte d’Azur, Centre National de La Recherche Scientifique, Institut de Physique de Nice, F-06560 Valbonne, France
4.School of Engineering, University of Glasgow, Glasgow G12 8LT, UK
5.Institute of Technologies for Communication, Information and Perception (TeCIP), Sant’Anna School of Advanced Studies, Via Moruzzi 1, 56127 Pisa, Italy
Metasurface-enhanced light detection and ranging technology | Nature Communications
摘要
本文报道了一种基于超表面增强的激光雷达(LiDAR)技术,旨在解决传统激光雷达帧率慢、分辨率低且视场与扫描速度难以兼顾的问题。该技术通过将超快小视场声光偏转器(AOD)与大面积被动超表面级联,成功实现了 150°×150° 的超大视场和千赫兹(kHz)级的高帧率,可同时获取外围和中心区域的成像信息。
研究中,利用有效折射率(ERI)设计的超表面具备灵活调控光束的能力,结合 AOD 的 MHz 级超快扫描特性,系统在 2D 和 3D 成像实验中展现出优异性能,能精准探测短距离(约 5 米)目标的位置与反射率,并实现 150° 视场的二维扫描。此外,通过双探测器方案,该系统模拟人类视觉特性,同时获得高分辨率小视场(零级光束)和低分辨率大视场(一级光束)图像,为先进驾驶辅助系统(ADAS)和机器人感知提供了更全面的环境信息。
性能测试表明,该系统单轴扫描截止频率约 6 MHz,双轴约 10 MHz,可在 MHz 级速度下实现超 140° 视场的调制,时间序列成像帧率最高达 3401 fps,能捕捉高速运动目标的动态信息。此项技术为提升自主系统的感知与决策能力提供了新方案,具有广泛的工业应用前景。
一、应用背景(工程问题)
(工程应用背景)自主移动系统(如自动驾驶汽车、仓库机器人等)需要通过传感器(激光雷达LiDAR核心传感器之一)实时获取周围环境信息以实现定位、测速等功能。
(现有方法)现有商用激光雷达受限于机械或固态偏转系统性能,存在帧率慢、分辨率低的问题,难以同时满足大视场和高帧率的需求,无法很好地适配先进驾驶辅助系统(ADAS)、机器人感知等场景对精准环境感知的要求。此外,在地形测绘、大气粒子检测、风速测量、动静态目标跟踪、AR/VR 等众多领域,激光雷达也面临着提升性能以拓展应用的挑战。因此,亟需开发能突破现有局限的激光雷达技术,以满足各工程领域对高效、精准环境感知的需求。
(本研究方法的同类方法)
同类方法主要聚焦于通过不同光学调控手段提升激光雷达的视场、帧率或分辨率,具体包括:
-
动态超表面结合可调材料的方案:如美国初创公司 LUMOTIVE 开发的电寻址反射共振超表面,通过将液晶渗入超表面实现电控扫描,其扫描频率超过普通液晶显示器,视场约 120°,虽在小型化和可扩展性上有潜力,但存在电子架构复杂及金属超表面可能带来显著光学损耗的问题。
-
其他光束偏转技术与光学元件的结合
- 光学相控阵(OPA)技术,通过控制阵列单元相位实现光束偏转,扫描速度快且视场约 60°,但制造工艺复杂,难以大规模工业应用。
- 微机电系统(MEMS),利用微型振镜实现光束偏转,将扫描频率提升至 kHz 级,但视场较小(水平通常≤25°,垂直≤15°)。
- 液晶调制器,基于液晶光学特性调控光束,不过视场通常低于 20°,调制频率为 kHz 级,在激光雷达扫描应用中存在局限。
二、设计与工作原理
如图1所示,该设计采用声光偏转器(AOD)与大面积超表面级联的架构,AOD 实现 MHz 级的小视场(2°×2°)扫描,经扫描透镜聚焦后,光束入射到具有径向对称相位延迟响应的超表面上,超表面将视场扩展至 150°×150°;其工作原理基于飞行时间(ToF)测量,通过快速探测器收集场景反射光信号,由 PXI 系统处理提取 ToF 以重建 2D/3D 图像,同时利用双探测器方案,通过零级和一级光束分别实现高分辨率小视场与低分辨率大视场的多区域成像,达成高帧率、大视场的激光雷达功能。具有径向对称相位延迟响应的圆形超表面相当于一个光束偏转角度的放大器。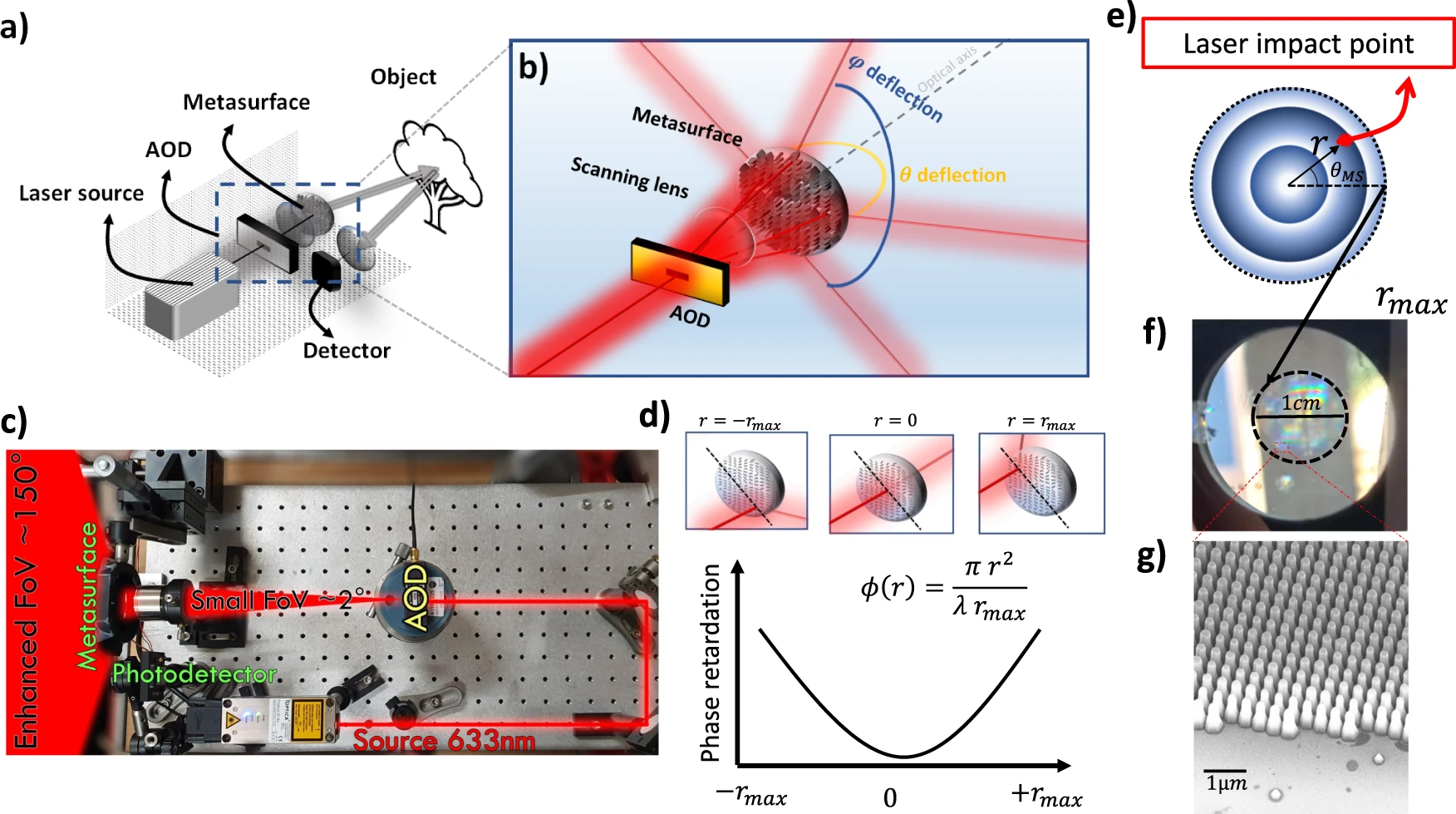
图1:超表面增强的FoV LidAR。
激光雷达系统的示意图。触发的激光源发射用于 ToF 检测的单脉冲,被引导至同步声光偏转器 (AOD),提供低 FoV (~2°) 的超快光扫描。偏转的光束被引导到扫描透镜,以扫描超表面上不同径向和方位角位置的激光光斑。穿过超表面的透射光根据撞击光束在组件上的位置而偏离,以覆盖和.使用快速探测器收集现场的散射光。处理数据以提取单个回波 ToF,用于场景的 2D 和 3D 成像。b 级联AOD-超表面组装偏转系统的细节。c 光学装置的俯视图摄影。d 底部:沿径向轴的超表面相分布的图形表示。上图:根据超表面上的入射光束定位的光束偏转表示。插入方程表示设计的相位函数。e 激光撞击点的轴向对称性图示。f 使用纳米压印光刻制备的 1 cm MS 的摄影。g 样品的SEM图像显示了不同尺寸的纳米柱构建块,通过考虑横向有效折射率变化来实现光束偏转。
2.1核心设计
- 系统架构设计:采用 “声光偏转器(AOD)+ 大面积超表面” 级联方案,通过 AOD 实现 MHz 级超快小视场(2°×2°)扫描,结合被动超表面将视场扩展至 150°×150°,同时保留高帧率特性,解决传统激光雷达 “高速扫描与大视场难以兼顾” 的问题。
- 超表面设计:基于有效折射率(ERI)机制,设计具有径向对称相位延迟响应的圆形超表面,通过调控纳米柱的尺寸和排列,使光束动量随径向尺寸线性增加(满足公式∂Φ/∂r = -k₀r/rₘₐₓ),实现光束按预设角度偏转;采用纳米压印光刻技术制备厘米级超表面,兼顾性能与可制造性。
- 多区域成像设计:利用超表面的多光束寻址能力,结合双探测器方案 —— 零级光束(未经超表面显著偏转)实现高分辨率小视场成像,一级光束(经超表面偏转)实现低分辨率大视场成像,模拟人类外周与中央凹视觉特性。
原则上,观测到的视场角没有限制,因为它完全依赖于超表面相位函数,在限制范围内用于传输方案。在这个初始演示中,我们实现了ERI MS 的简单概念旨在在空间上赋予相对于径向尺寸的线性增加动量由表达式给出:
k0是自由空间动量,并且\Phi局部相位延迟。这种设计导致抛物线相位延迟,如图所示。1d. 在此设计中,偏转的光束将因最大相位延迟和对于外围点和中心点。此外,在笛卡尔坐标中变换的式确定了两个轴上的偏转角的值,表示为,根据广义斯内尔定律41:
其中相位梯度在超表面平面处定义,位于z=0.考虑到源自 AOD 的小入射角,表达式简化为:
这种表达式根据偏转角电压依赖性的实验测量,验证了在小角度[−40°,40°]下观察到的线性度
2.2工作原理
- 光束扫描与视场扩展:633nm 调制激光源发射单脉冲(速率最高 250MHz),经 AOD 偏转(2°×2° 范围内)后,由扫描透镜聚焦到超表面的不同径向和角向位置;超表面根据光束入射位置的径向坐标(r)和角向坐标(θₘₛ),通过相位延迟调控将光束偏转到对应角度,最终实现 150°×150° 的超大视场覆盖。
- 测距与成像重建:系统通过飞行时间(ToF)测量原理工作,即激光脉冲往返目标的时间(Tₒբ)与距离(d)满足 2d = c・Tₒբ(c 为光速);快速探测器收集场景反射的光信号,经 PXI 系统处理后,将每个扫描角度对应的 ToF 与像素关联,重建 2D/3D 图像。
- 高速动态成像:AOD 的 MHz 级扫描速度与超表面的视场扩展能力结合,使系统可实现单轴 6MHz、双轴 10MHz 的扫描截止频率,支持高达 3401fps 的时间序列成像,能捕捉高速运动目标(如旋转斩波器)的动态信息。
三、实验内容、结果及讨论
主要做了三个实验
1.2D 与 3D 成像实验
2.仿生多区域成像实验
3.高速性能与动态成像实验
3.1. 2D 与 3D 成像实验
- 1D 扫描实验:对放置在桌面上的三个不同反射体(方形、圆形、盒形反射器)进行扫描,记录其位置和反射信号强度。
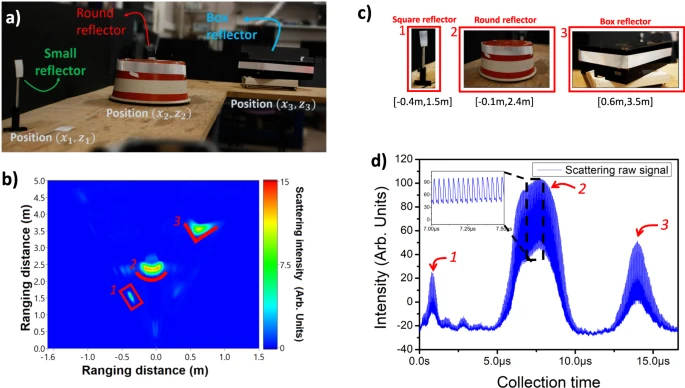
a 现场摄影。b 使用高反射带对桌子上移位的三个物体进行测距图像,以提高返回信号的强度。在(1)中,(2)一个带有反射器的圆形物体中使用了带有小反射器的柱子,在(3)中,有一个箱形反射器,周围有胶带。该图显示了正确测距距离 X(扫描尺寸)和 Z(测距尺寸)的图像,显示了感应所有三个物体的能力。c 根据(b)中的测距图像,单个物体的位置。d 为相应图像收集的原始信号,表明朝向法向的物体具有更大的散射强度,插图显示用于确定 ToF 测距距离的单脉冲
- 3D 成像实验:通过级联第二个正交方向的声光偏转器(AOD)扩展视场维度,对不同距离(1.2 m、2.7 m、4.9 m)的目标进行扫描,验证二维(方位角和仰角)150° 视场的成像能力,并展示 Lissajous 曲线等扫描模式。
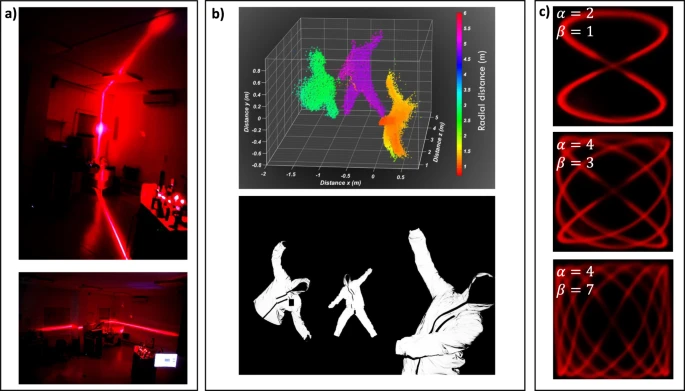
图3:3D成像和广角扫描能力
实验室的激光雷达线扫描显示仰角(上)和方位角(下)的大视场角。请注意,上图显示了覆盖从地面到测试室天花板的整个范围的扫描线轮廓超过 150°。b 3D测距演示(上):场景(下)设置了穿着反光服的演员在场景中,距离Z从1.2米到4.9米不等。颜色表示距离。c 使用偏转函数的利萨如扫描,针对不同参数大小以说明在大 FoV 配置中快速光束扫描的激光投影功能。
3.2. 仿生多区域成像结果
双探测器方案同时获取两类图像:零级光束捕捉到中心高分辨率目标,一级光束覆盖 150° 大视场并显示外围目标,模拟了人类外周与中央凹视觉特性
以前的实验是通过使用扫描透镜将AOD偏转的光聚焦在相对较小的超表面(直径1、2和3毫米)上来进行的。这种配置有利于一个小光斑(50 μm量级)来包含MS角发散到一个小的参数区域,即,用小光斑扫描MS可以防止与空间变化的偏转区域出现大的重叠。为了减少进一步的光束发散并根据需要提高分辨率,有必要增加超表面的直径和复杂性,并使用完全准直的光束,本文使用了纳米压印光刻(NIL)实现了厘米尺寸的超表面偏转器。导流板直接放置在 AOD 之后,无需使用扫描透镜。我们专门设计了一种大面积偏转器,可实现~40%的中等一阶偏转效率,并利用非偏转的零阶窄扫描FoV同时扫描两个具有不同FoV和分辨率的区域。该演示专门利用了超表面的多波束寻址能力,从而产生了双模成像:(i)由仅由AOD偏转的近准直零阶光束提供的高分辨率扫描,以及(ii)由超表面偏转的一阶光束提供的大FoV、低分辨率图像。在空间上选择了场景不同部分的返回/散射信号。为此,我们使用了双探测器监测方案。第一个探测器从全数值孔径(~2立体角),但它阻挡了中央小数值孔径(在探测器前面放置了一个光束阻挡器)。第二个探测器仅覆盖零阶光扫描产生的窄视场角的小数值孔径(空间滤波器用于选择观察区域)。采用双光束超表面扫描方案对场景进行成像(图1)。4b,顶部)具有两个感兴趣的场:(i)放置在空间外围不同区域的三个参与者,如图所示。4c(上)和一个高度分辨率的棋盘状物体,以一个小视场角向前放置,如图所示。4c(下)。图中所示的图像。4c 对应于两个探测器同时采集的低分辨率和高分辨率成像。在高 FoV 周边视觉上以高分辨率前向和低横向分辨率进行多区域扫描可能是满足高级驾驶辅助系统 (ADAS) 需求的颠覆性解决方案。
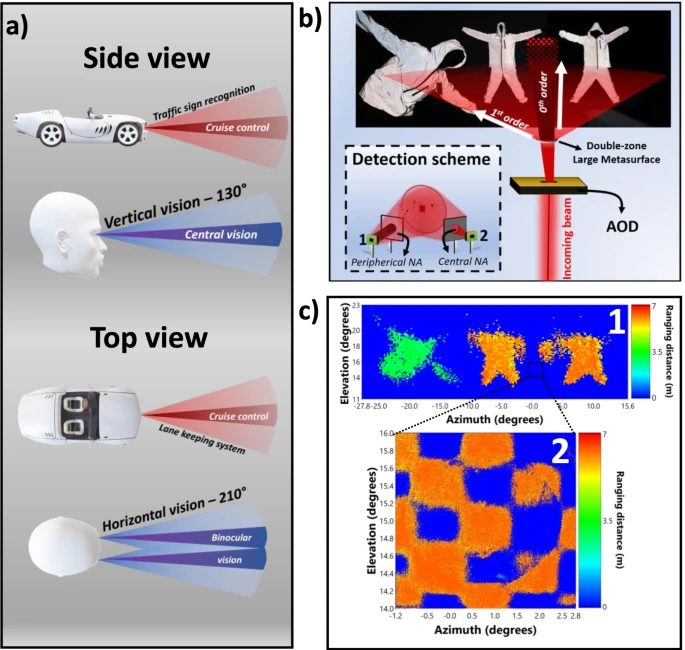
图 4:多区成像
a 人体多区域观看的示意图,其概念将应用于 ADAS 系统。这种模拟特性使双重视觉能够实现双重视觉,用于高分辨率、远距离、中心和较低分辨率、更大 FoV、用于周边视图。b 通过实验实现测试激光雷达系统的双区成像功能,包括用于同时图像复用采集的双检测方案(插图)。中央的 0 次衍射光束以高分辨率扫描指向图像中心的小区域,而 1 次衍射光束扫描整个场。c 顶部:我们显示 (b) 中描述的扫描场景的结果。顶部表示激光雷达大视场距图像。该图像是通过使用(b)中草绘的障碍物遮挡数值孔径的中心部分而获得的。底部激光雷达测距高分辨率图像显示了使用第 0 个衍射光束捕获的中心部分场景,覆盖约 2° 的 FoV。
3.3.高速性能与动态成像实验
3.3.1.系统截止频率测试
- 实验设置:在实验中,研究人员在墙壁上放置高反射胶带,以此作为反射目标。使用该系统分别在单轴(方位角)和双轴(方位角和仰角)进行扫描。
- 测量方法:通过测量不同扫描频率下的反向散射信号幅度,来确定系统性能随频率的变化。将反射信号幅度衰减到 -3dB 时的频率定义为 “系统截止频率”。
-
实验结果:实验结果表明,单轴扫描时,系统在约 6MHz 的频率下,信号衰减小于 -3dB;双轴扫描时,在约 10MHz 的频率下,信号衰减小于 -3dB 。这证明该系统能够在 MHz 级的速度下实现大视场(>140°)的调制,且最高扫描频率可达 6.25MHz。
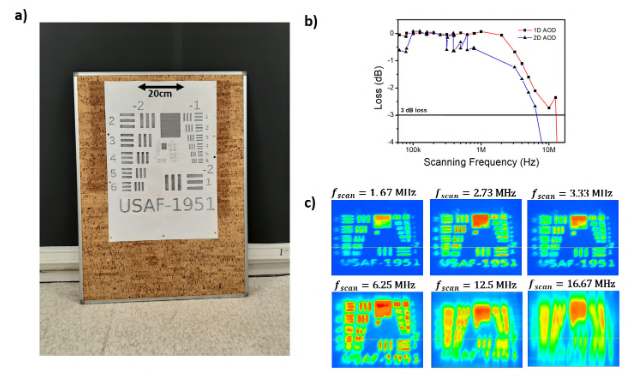
图S5-光束速度和图像质量。a)用于评估成像质量与128扫描频率关系的目标测试图片。b)扫描系统在1D偏转器(蓝色)和2D偏转器(红色)下的带宽响应。图表底部的黑色线表示幅度下降超过50%的3dB阈值点。c)激光雷达强度图像显示图像质量下降。(上图)图像仍具有良好的分辨率,(下图)扫描超出3dB阈值时图像退化。
3.3.2.时间序列成像实验
- 实验设置:以一个标称转速为 100Hz 的旋转斩波器作为动态系统,在旋转斩波器的其中一个机械快门上装饰高反射胶带,并将其放置在距离激光源 70cm 处。
- 测量方法:采用三种不同的采集帧率,即 741fps、1020fps 和 3401fps,对旋转斩波器进行时间序列成像实验。通过从测距图像中心对旋转斩波器的径向轴进行积分,并在整个 0 到 2π 角轴上拟合高斯曲线,以此来跟踪反射胶带在空间和时间域中的中心位置。
- 实验结果:所有实验测得旋转斩波器的平均转速为 92.71Hz,与标称速度 100Hz 存在约 7.3Hz 的差异,研究人员认为这是由斩波器的相位抖动控制机制导致的。此外,实验还发现旋转机械快门存在微小的晃动,这是由于反射胶带的存在引起的,在反射胶带位于底部时(例如在 t = 1.0ms/10.8ms 时),旋转斜率发生了变化 。通过恢复的测距信息,研究人员估计反射胶带的尺寸为 4cm。
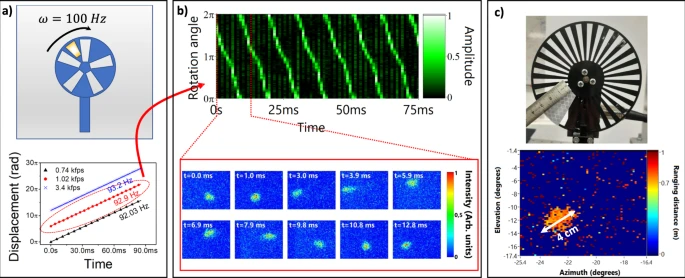
a 上图:场景说明:设置了一台标称速度为 100 Hz 的机械斩波器,并用反光带覆盖了一些板。底部:三种不同帧速率的旋转速度测量值。b 顶部:径向轴的归一化强度图,说明车轮的动力学。请注意周围旋转角度的不同斜率代表速度的降低。下图:说明各种角度位置的单帧强度数据。c 顶部:斩波器的摄影和反光带的尺寸。下图:t = 1.0 ms 的测距图像以及从恢复数据中测量磁带的图像。
四、结论
该研究的讨论结果主要围绕超表面增强激光雷达技术的性能突破、局限性及应用前景展开,具体如下:
-
性能突破与优势
该系统通过将超快声光偏转器(AOD)与被动超表面级联,实现了 150°×150° 的超大视场和 MHz 级扫描速度(单轴 6 MHz、双轴 10 MHz),较传统激光雷达技术在扫描速率上提升约两个数量级,解决了 “高速扫描与大视场难以兼顾” 的核心矛盾。同时,其多区域成像能力可模拟人类视觉(高分辨率中心视场与低分辨率外围视场),为先进驾驶辅助系统(ADAS)和机器人感知提供了更全面的环境信息,有助于提升自主系统的决策效率。 -
局限性与优化方向
系统当前受限于激光脉冲峰值功率(约 10 mW),实验主要在室内环境进行,远距离探测能力需进一步验证;数据处理依赖传统 CPU 导致 latency,需通过 FPGA/ASIC 优化以实现实时输出;超表面的一级偏转效率约 40%,存在提升空间;此外,高帧率下的分辨率与成像质量需平衡,超过截止频率后信号质量下降会影响精度。 -
应用前景与拓展
结合码分多址(CDMA)技术可提升成像帧率与空间分辨率(如 200×200 像素下达 125 帧 / 秒),在显微镜、光学相干断层扫描等领域有潜在应用。该技术的随机访问扫描、多区域成像特性,有望降低机器人和 ADAS 的决策延迟,推动其在自动驾驶、高速动态成像等领域的工业化应用。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐


 10
10 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)