发那科机器人二次开发:C#与MES系统的完美邂逅
发那科机器人二次开发 C#读取和写入数据,可以获取点位信息。非常适合进行二次开发及制作MES系统。工业自动化浪潮席卷全球,机器人技术成为现代制造业的核心驱动力。在众多工业机器人品牌中,发那科以其卓越的性能和广泛的适用性,成为制造业数字化转型的重要选择。而发那科机器人强大的二次开发功能,更为智能制造注入了无限可能。在工业4.0时代,MES系统(制造执行系统)作为连接上层管理系统和底层设备的桥梁,扮演
发那科机器人二次开发 C#读取和写入数据,可以获取点位信息。 非常适合进行二次开发及制作MES系统。
工业自动化浪潮席卷全球,机器人技术成为现代制造业的核心驱动力。在众多工业机器人品牌中,发那科以其卓越的性能和广泛的适用性,成为制造业数字化转型的重要选择。而发那科机器人强大的二次开发功能,更为智能制造注入了无限可能。
在工业4.0时代,MES系统(制造执行系统)作为连接上层管理系统和底层设备的桥梁,扮演着越来越重要的角色。通过C#语言对发那科机器人进行二次开发,能够实现对机器人运行状态的实时监控、工艺参数的优化调整,以及生产数据的智能分析,为MES系统的功能完善提供了强有力的技术支撑。
一、C#与发那科机器人通信的实现
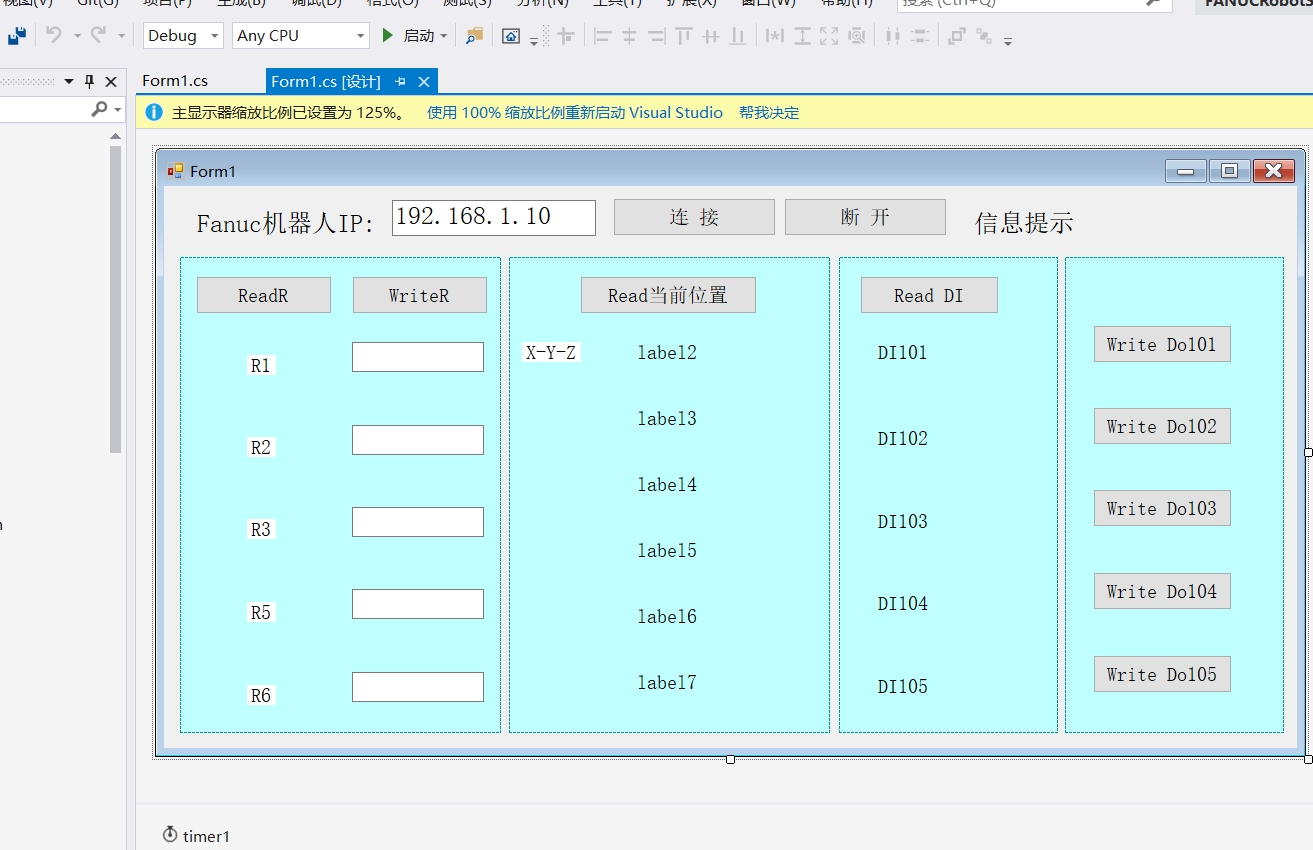
要实现对发那科机器人的二次开发,首先需要建立与机器人控制器的通信连接。通过C#语言,我们可以轻松实现这一目标。
首先,我们需要在C#项目中引用发那科机器人提供的SDK库文件。这一步骤类似于在Visual Studio中添加对第三方程序集的引用。
接下来,我们就可以编写代码实现与机器人控制器的通信了。以下是一个简单的示例代码:
`csharp
using FANUC.Robotics;
public class RobotController
{
private Robot robot;
public void Connect(string ipAddress)
{
robot = new Robot();
robot.Connect(ipAddress);
}
public void Disconnect()
{
if (robot.IsConnected)
robot.Disconnect();
}
}
`
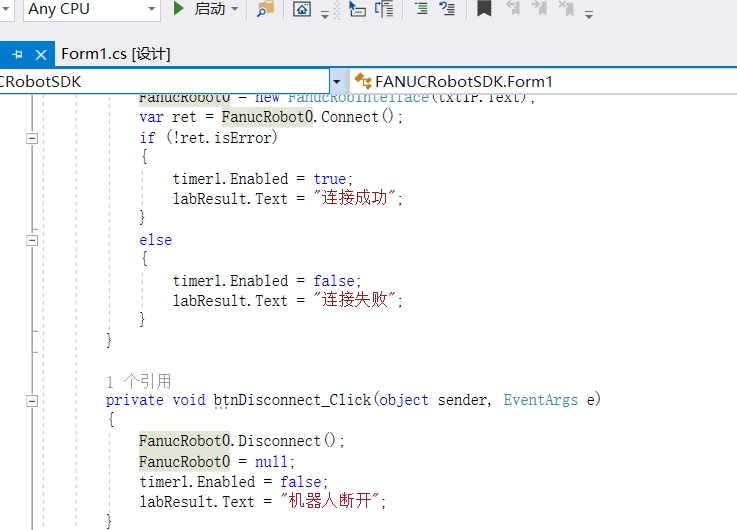
通过这段代码,我们实现了与发那科机器人控制器的连接和断开功能。Connect方法接受机器人控制器的IP地址作为参数,建立网络连接。Disconnect方法则用于断开与控制器的连接。
二、机器人点位数据的读取与分析
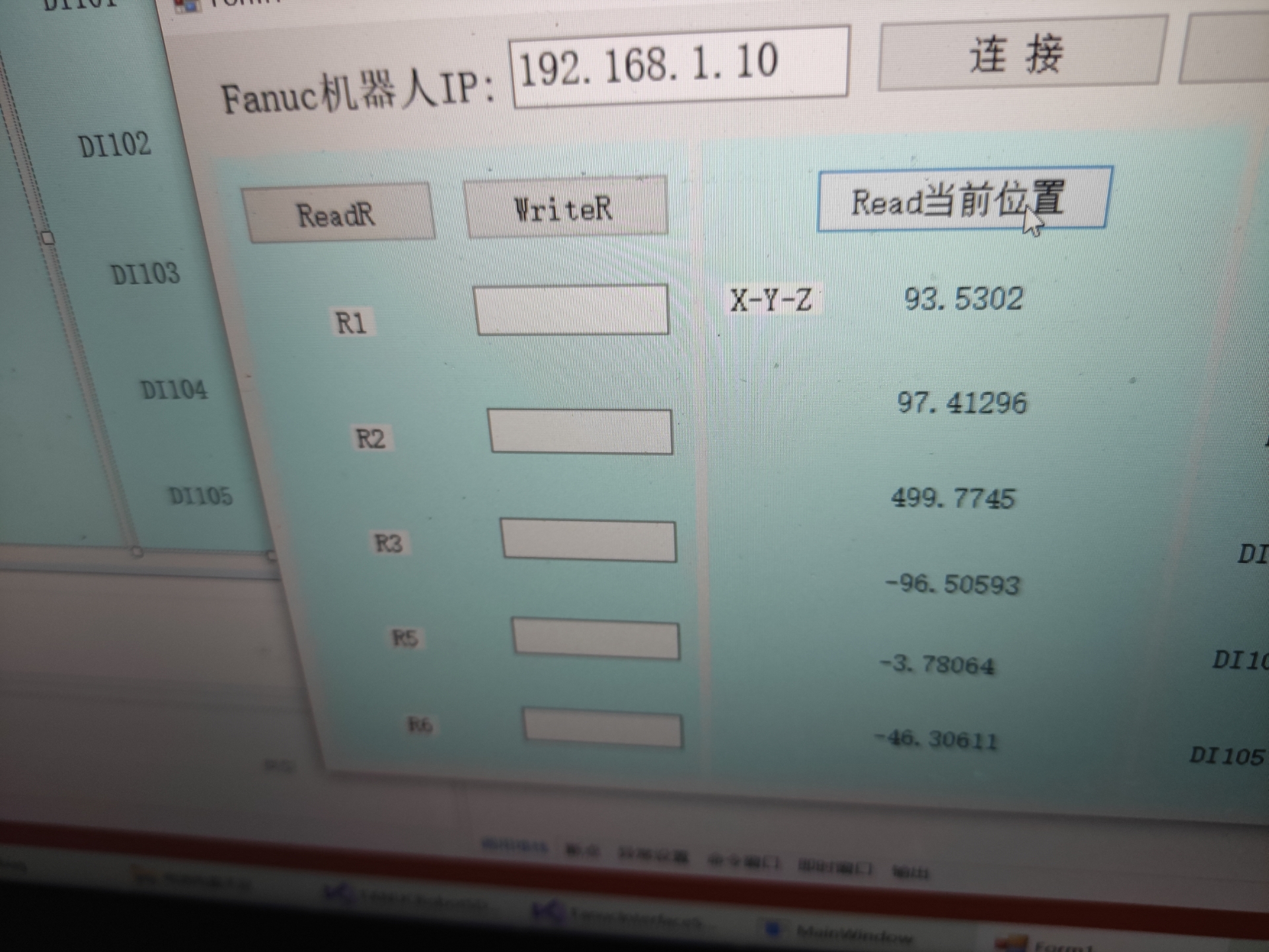
读取机器人点位数据是二次开发中的重要环节。这些数据包括机器人当前位置、姿态、速度等信息,为MES系统的决策提供数据支持。
以下是一个读取机器人当前点位数据的示例代码:
`csharp
public PointData GetRobotPosition()
{
if (!robot.IsConnected)
throw new Exception("未连接到机器人");
PointData pointData = robot.ReadPointData();
return pointData;
}
`
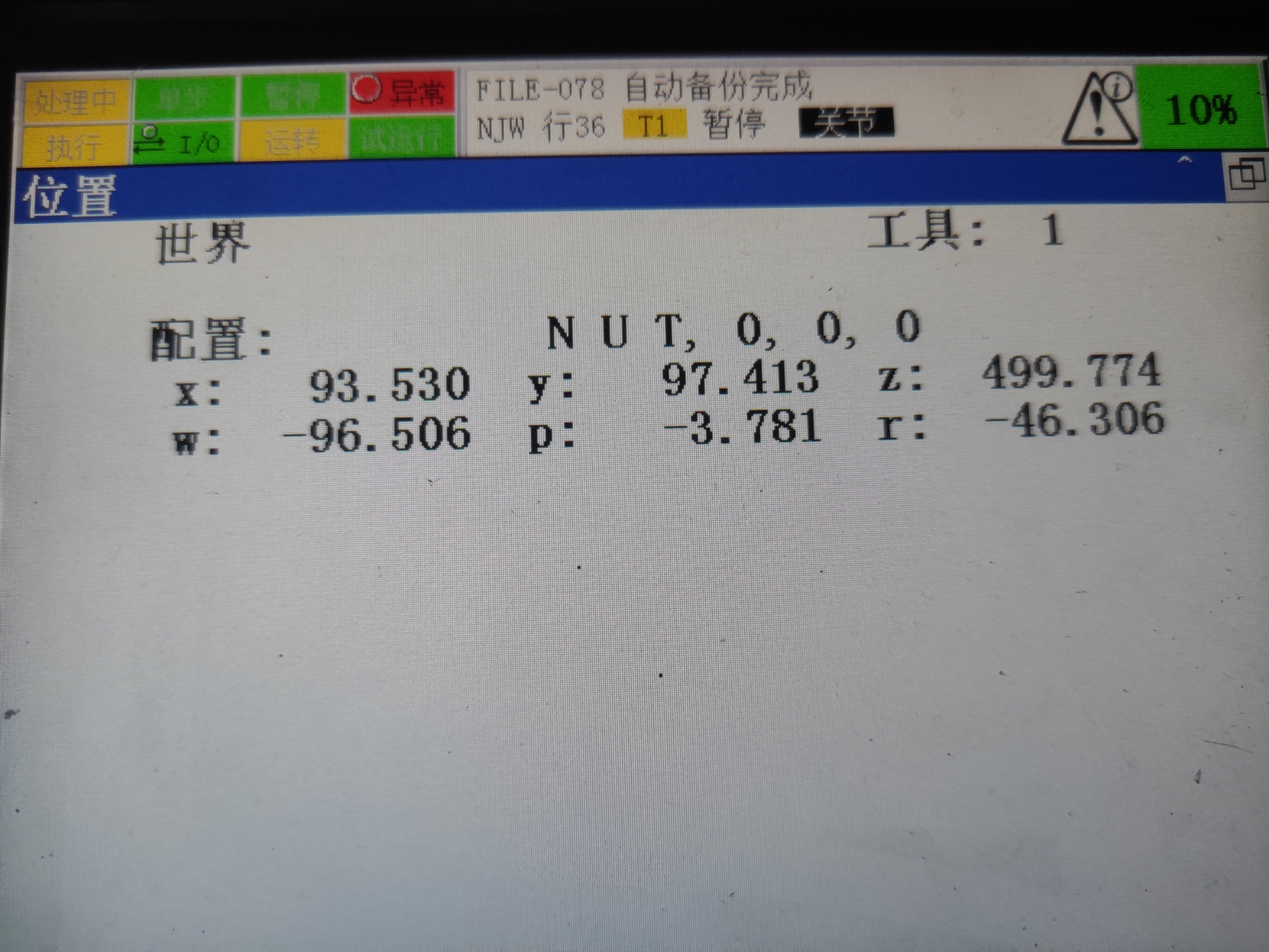
该函数首先检查机器人是否已连接,若未连接则抛出异常。然后通过ReadPointData方法读取机器人当前点位数据,并将其返回。
这些点位数据可以被MES系统用于生产过程监控、质量控制以及工艺优化。例如,通过分析机器人运行轨迹数据,可以发现潜在的效率瓶颈,优化工艺参数,提高生产效率。
三、MES系统中的数据应用
将机器人点位数据集成到MES系统中,能够实现生产过程的智能化管理。以下是数据集成的一个简单示例:
`csharp
public void UpdateMES(PointData pointData)
{
// 将点位数据发送到MES系统
mesClient.Send(pointData);
// 记录数据到历史数据库
dataLogger.Log(pointData);
}
`
该函数实现了将机器人点位数据发送到MES系统,并记录到历史数据库的功能。通过这些数据,MES系统可以实现以下功能:
- 实时监控机器人运行状态
- 分析生产效率和设备利用率
- 预测设备维护需求
- 优化生产工艺参数
四、智能制造的未来展望
随着工业4.0的深入发展,发那科机器人二次开发与MES系统的结合将发挥更大的作用。通过C#语言的开发,我们可以实现更多智能化功能,如:
- 基于机器学习的预测性维护
- 自适应工艺参数优化
- 数字孪生技术的应用
这些技术将进一步提升生产效率,降低运营成本,推动制造业向智能化方向发展。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐
 7
7 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)