【LLM】语言模型驱动的机械臂操控:从语言到动作的智能跨越
本文提出了一种基于语言模型程序(LMP)的创新框架,通过大型语言模型将自然语言指令直接映射为机械臂动作。系统采用分层架构,利用GPT-4解析语义并生成控制代码,驱动UR5e机械臂在PyBullet仿真环境中完成任务。该方法融合了运动学建模和概率推理技术,实现了从"把棕色积木放进棕色碗里"等自然语言指令到物理动作的端到端转换。实验验证了框架在多任务场景下的有效性和鲁棒性,为机器人
摘要
随着大型语言模型(Large Language Models, LLM)在自然语言理解与推理上的突破,与机器人系统的交互方式正在发生深刻改变。本文介绍一种基于语言模型程序(Language Model Programs, LMP)的创新框架,实现了从自然语言指令到机械臂物理动作的端到端映射。通过在PyBullet仿真环境中对UR5e机械臂和Robotiq 2F85夹爪的系统性实验,验证了该框架在多种任务场景下的有效性和鲁棒性,为机器人控制的民主化和智能化提供了新的技术路径。
1. 引言:当机械臂学会"听话"
传统机器人操控依赖于精确的轨迹规划和复杂的参数调优,这要求操作者具备专业的机器人学和编程知识。然而,在真实应用场景中,用户更希望通过直观的自然语言与机器人交互,如"把棕色积木放进棕色碗里"这样的简单指令。这种需求推动了语言模型与机器人技术的深度融合,催生了新的研究范式。
LMP框架正是基于这一理念,将大型语言模型的语义理解能力与机器人的物理执行能力有机结合。与传统的基于预定义动作库的方法不同,该系统能够动态解析和理解未曾预见的任务指令,自动生成相应的控制代码,并在仿真环境中完成从语言到动作的完整转换。这种方法的创新之处在于,它将机器人控制从低级的运动规划问题提升到了高级的语义理解和任务规划层面。

2. 系统架构:语言到动作的智能桥梁
系统采用分层架构设计,构建了从自然语言到物理执行的完整技术链路。整体架构如图所示:

在具体实现中,用户输入的自然语言指令首先被送入基于GPT-4的语言模型进行语义解析。模型需要识别指令中的关键元素:目标物体、空间关系、动作类型和执行顺序。接着,LMP组件根据解析结果生成结构化的Python代码,这些代码调用预先封装好的机器人操作接口,如get_obj_pos()、put_first_on_second()等。最后,生成的代码在PyBullet仿真环境中执行,驱动UR5e机械臂完成相应的抓取和放置操作。
这种分层架构的优势在于其模块化和可扩展性,每一层都可以独立优化和升级,而不影响其他组件的功能。例如,语言模型层可以替换为更先进的模型,控制层可以适配不同的机器人平台,而整体的系统架构保持不变。
3. 数学基础:运动学与概率模型的融合
3.1 机械臂运动学建模
机械臂的运动控制建立在严谨的数学基础上。对于6自由度的UR5e机械臂,使用标准的Denavit-Hartenberg(DH)参数法来描述其运动学特性。每个关节的齐次变换矩阵可以表示为:

其中,θiθi为关节角度,aiai、didi、αiαi是由机械结构决定的常数参数。末端执行器相对于基坐标系的位姿通过连续变换得到:
T60=T10T21T32T43T54T65T60=T10T21T32T43T54T65
在实际控制中,更常遇到的是逆运动学问题:给定末端执行器的目标位姿TtargetTtarget,求解对应的关节角度向量θθ。这个问题通常没有解析解,需要通过数值方法迭代求解:
θk+1=θk+J+(θk)(xtarget−f(θk))θk+1=θk+J+(θk)(xtarget−f(θk))
其中J+J+是雅可比矩阵的伪逆,f(θ)f(θ)是正运动学函数。

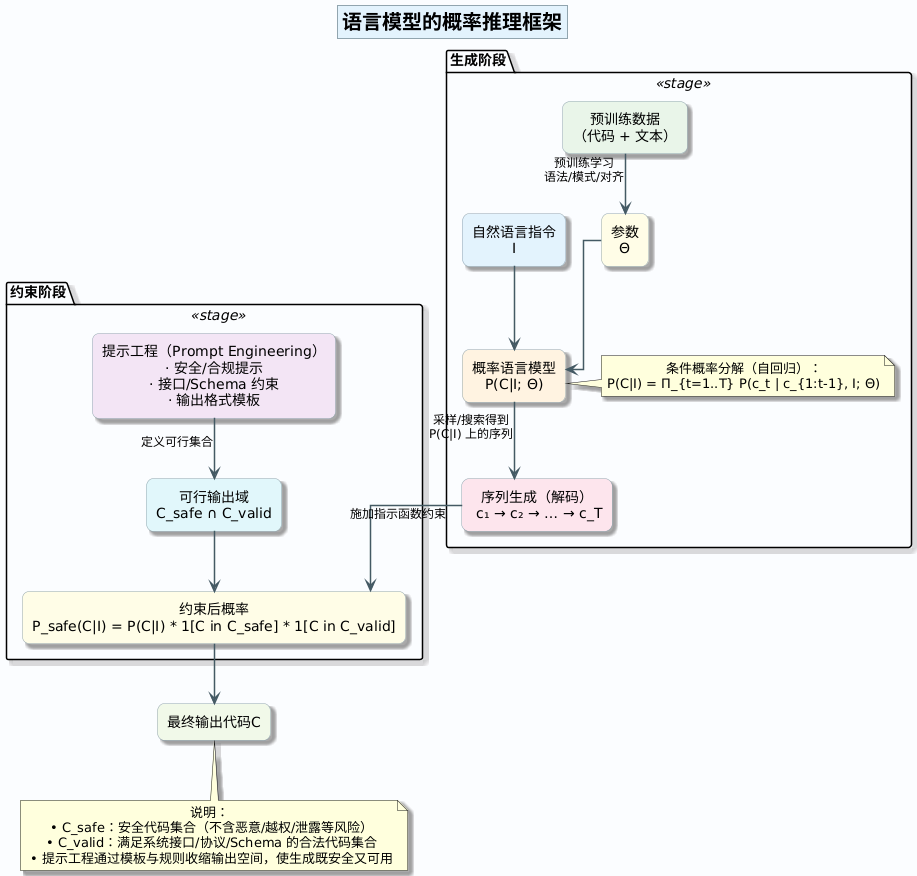
3.2 语言模型的概率推理框架
语言模型的代码生成过程可以形式化为一个序列生成的概率推理问题。给定自然语言指令II,模型生成程序代码CC的概率可以分解为:
P(C∣I)=∏t=1TP(ct∣c1:t−1,I;Θ)P(C∣I)=t=1∏TP(ct∣c1:t−1,I;Θ)
其中ctct是程序中的第tt个token,ΘΘ是语言模型的参数。通过在大规模代码和文本数据上的预训练,模型学习到了编程语言的语法结构、常用模式以及与自然语言描述之间的对应关系。
在框架中,通过提示工程(prompt engineering)来约束模型的输出空间,确保生成的代码符合安全规范和系统接口要求。具体而言,定义了如下的概率约束:
Psafe(C∣I)=P(C∣I)⋅1C∈Csafe⋅1C∈CvalidPsafe(C∣I)=P(C∣I)⋅1C∈Csafe⋅1C∈Cvalid
其中CsafeCsafe表示安全的代码集合,CvalidCvalid表示符合系统接口规范的代码集合。
4. 语言模型程序:从语义到代码的桥梁
点击链接【LLM】语言模型驱动的机械臂操控:从语言到动作的智能跨越阅读原文

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐


 48
48 0
0- 0



 已为社区贡献10条内容
已为社区贡献10条内容

所有评论(0)