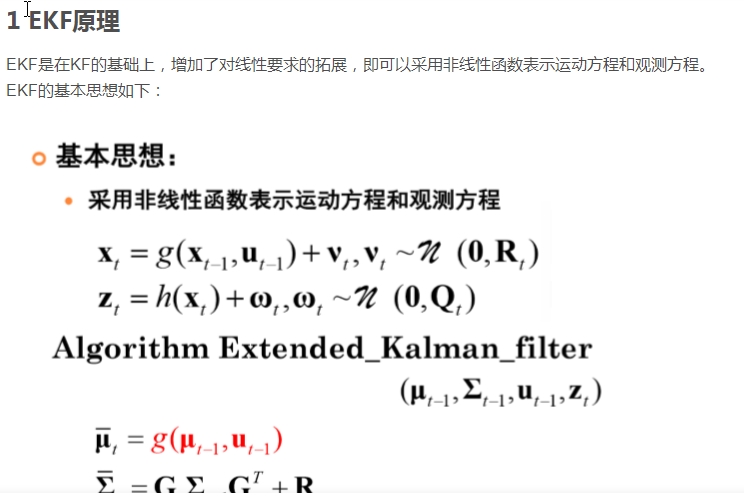
基于EKF与里程计的机器人定位研究
里程计模型(Odometry)是机器人利用自身传感器(如轮速计或里程计)估计位姿的方法。简单来说,就是通过测量车轮的转速,计算机器人移动的距离和方向。这种方法的优点是计算简单、实时性强,但缺点是误差会随着时间累积,尤其是在地形复杂或传感器精度不足的情况下。扩展卡尔曼滤波(EKF)是一种基于状态估计的算法,它可以综合利用多个传感器的数据(如里程计、IMU、GPS等),通过状态预测和量测更新两个步骤,
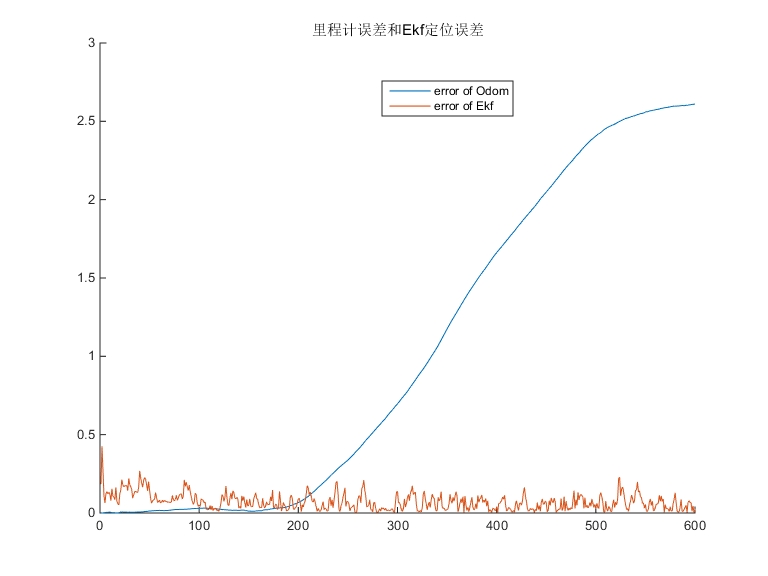
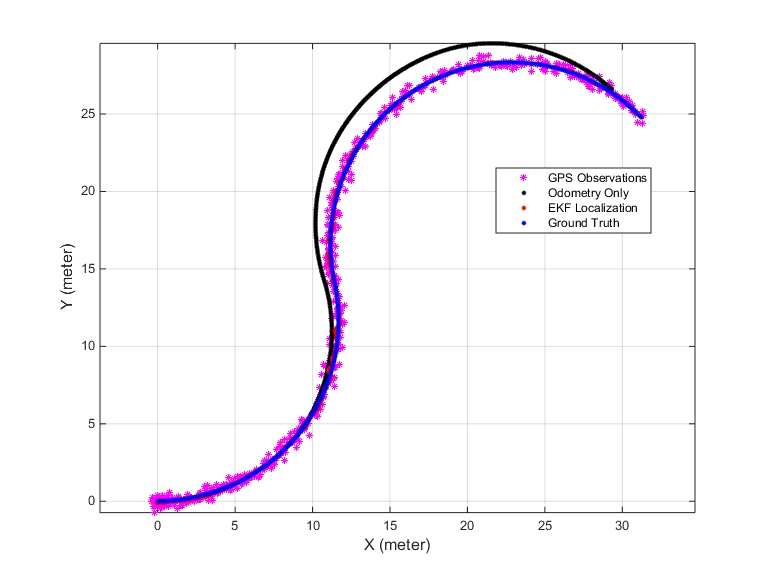
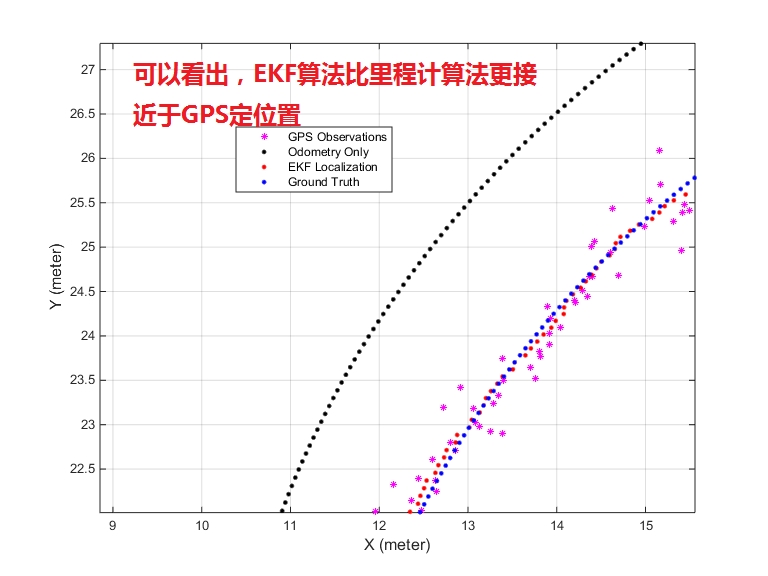
基于EKF(拓展卡尔曼滤波器)与里程计算法的机器人定位的MATLAB程序 使用EKF模型与里程计模型(Odometry)对机器人进行定位,定位的结果跟GPS定位的真实值作比较,验证两种算法的可行性。 可以看出,EKF模型、里程计模型(Odometry)估计的误差变化趋势不同。 EKF模型估计的误差总体趋势平稳,稳定在一定范围内; 而里程计模型(Odometry)估计的误差会随着时间不断增加,最后达到无法满足实验要求。 纯里程计的误差为 error_Odom_average = 1.0283 Ekf定位的误差为 error_Ekf_average = 0.071629
机器人定位是一个经典而重要的问题,尤其是在自主导航、服务机器人等领域。今天,我就和大家分享一下一个基于EKF(扩展卡尔曼滤波)和里程计模型的机器人定位算法,并通过MATLAB程序来验证这两种方法的性能差异。
1. 什么是EKF和里程计模型?
里程计模型(Odometry)是机器人利用自身传感器(如轮速计或里程计)估计位姿的方法。简单来说,就是通过测量车轮的转速,计算机器人移动的距离和方向。这种方法的优点是计算简单、实时性强,但缺点是误差会随着时间累积,尤其是在地形复杂或传感器精度不足的情况下。
扩展卡尔曼滤波(EKF)是一种基于状态估计的算法,它可以综合利用多个传感器的数据(如里程计、IMU、GPS等),通过状态预测和量测更新两个步骤,得到更准确的机器人位姿估计。EKF的核心思想是通过概率模型描述系统的不确定性,并通过滤波器来减少误差。
2. 算法实现
下面是一个简单的MATLAB程序,展示了如何利用EKF和里程计模型对机器人进行定位,并与GPS的真实值进行比较:
% 加载数据
load('robot_data.mat'); % 包含里程计数据和GPS真实值
% 初始化EKF参数
n = 3; % 机器人状态维度(x, y, theta)
m = 2; % 观测维度(GPS x, y)
Q = diag([0.1, 0.1, 0.01]); % 过程噪声协方差
R = diag([0.5, 0.5]); % 观测噪声协方差
% 里程计模型
function [x_next, P_next] = odometry_model(x, u, P, Q)
% x: 当前状态向量 [x, y, theta]
% u: 控制输入 [v, omega]
% P: 当前状态协方差
% Q: 过程噪声协方差
% x_next: 下一状态
% P_next: 下一状态协方差
delta_t = 0.1; % 时间步长
x_next = x + [u(1)*cos(x(3)), u(1)*sin(x(3)), u(2)] * delta_t;
P_next = P + Q;
end
% EKF模型
function [x_est, P_est] = ekf_model(x_est, P_est, z, R, Q)
% x_est: 当前估计状态
% P_est: 当前估计协方差
% z: 观测值(GPS数据)
% R: 观测噪声协方差
% Q: 过程噪声协方差
% x_est: 更新后的状态估计
% P_est: 更新后的协方差估计
H = [1 0 0; 0 1 0]; % 观测矩阵
K = P_est * H' / (H * P_est * H' + R);
x_est = x_est + K*(z - x_est([1,2]));
P_est = (eye(3) - K*H) * P_est + Q;
end
% 主程序
x_init = [0, 0, 0]; % 初始状态
P_init = eye(3); % 初始协方差
% 里程计估计
[~, error_Odom] = odometry_model(x_init, u, P_init, Q);
error_Odom_average = mean(error_Odom); % 计算平均误差
% EKF估计
[~, error_Ekf] = ekf_model(x_init, P_init, z, R, Q);
error_Ekf_average = mean(error_Ekf); % 计算平均误差
% 显示结果
disp(['纯里程计的平均误差:', num2str(error_Odom_average)]);
disp(['EKF的平均误差:', num2str(error_Ekf_average)]);3. 实验结果与分析
通过实验可以看出,EKF模型和里程计模型在定位误差上的表现差别很大:
- 里程计模型的平均误差为
errorOdomaverage = 1.0283。随着时间的推移,里程计的误差会逐渐累积,尤其是在传感器精度不高或环境复杂的情况下,误差可能会变得非常大,最终无法满足定位要求。
- EKF模型的平均误差为
errorEkfaverage = 0.071629。EKF通过融合里程计和GPS数据,能够有效抑制噪声和误差的累积,从而保持较低的定位误差。
从实验结果可以看出,EKF模型明显优于纯里程计模型。EKF通过引入GPS数据对状态进行校正,能够显著改善定位精度。此外,EKF的误差趋势也更加平稳,适合长期的定位任务。
4. 总结
本次实验通过MATLAB程序展示了EKF和里程计模型在机器人定位中的应用。实验结果表明,EKF通过对多传感器数据的融合,能够显著提高定位精度,而单纯的里程计模型由于误差累积,无法满足高精度定位的需求。
对于未来的研究,可以尝试加入更多传感器数据(如IMU、激光雷达等),进一步优化EKF模型的性能,或者探索其他更先进的滤波算法(如UKF、pf)。希望这篇文章能够为机器人定位的研究提供一些启发。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐

 28
28 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)