智元人形机器人:开发环境配置
配置一个稳定、完整的开发环境,是开启人形机器人的第一步,本文旨在提供一份能够导入智元机器人仿真的配置流程。跟随以下步骤,将一步步搭建开发环境。
注:本文主要参考:智元人形机器人:从零开始完成开发环境配置这篇文章,该文章主要记录复现过程,并非原创。
1. 操作系统配置
方案选择:使用VMware虚拟机软件创建虚拟环境。
系统版本:使用 Ubuntu 22.04 LTS版本。
2. 核心开发环境配置
当Ubuntu系统准备就绪后,安装机器人开发所依赖的核心工具链,包括Cmake、GCC、Eigen3、Boost、Python,下面展示各个模块的安装过程。
2.1 安装Cmake(构建系统管理器)
sudo apt update
sudo apt install cmake
cmake --version # 验证安装,本人显示为3.22.1

2.2 安装 GCC/G++(编译器套件)
安装说明: Ubuntu 22.04默认已安装GCC 11.4,为确保C++编译器也已就位,可以安装 G++(包含 C/C++ 编译器)
gcc --version
sudo apt install g++ # 安装C++编译器
g++ --version
2.3 安装 Eigen3(数学矩阵库)
安装说明: Ubuntu 22.04默认版本为Eigen3.4
sudo apt install libeigen3-dev
#Eigen本身没有可执行文件,可通过头文件的宏定义确认版本
cat /usr/include/eigen3/Eigen/src/Core/util/Macros.h | grep -E "#define EIGEN_(VERSION_|MAJOR|MINOR|PATCH)"
2.4 安装Boost(C++库集)
Boost库提供了跨平台的C++组件,涵盖智能指针、多线程、文件系统、正则表达式等,许多机器人软件框架和算法库都依赖于Boost提供的丰富功能。
安装说明: Ubuntu 22.04 默认版本Boost 1.74
sudo apt install libboost-all-dev
# 通过dpkg查看已安装的Boost版本
dpkg -s libboost-dev | grep 'Version'
# 或者类似前面通过宏定义
cat /usr/include/boost/version.hpp | grep "BOOST_LIB_VERSION"
2.5安装python3及工具包
安装说明: Ubuntu 22.04已预装Python 3.10,建议安装完整开发套件。
sudo apt install python3 python3-pip python3-dev python3-venv
python3 --version # 查看Python版本
pip3 --version # 包管理器版本3. 仿真环境配置(MuJoCo)
3.1 安装 MuJoCo 物理引擎
MuJoCo(Multi-Joint dynamics with Contact)是一款专注于机器人控制和生物力学仿真的高性能物理引擎,优势是计算速度快、接触模型精确,安装步骤如下:
a. 获取安装包
从 GitHub Releases(github.com/google-deepmind/mujoco/releases) 页面下载适用于Linux的最新版本(当前最新为3.4,根据平台选择,比如x86选mujoco-3.4.0-linux-x86_64.tar.gz)
b. 解压与放置
# 创建目录
mkdir -p ~/mujoco
# 将文件放在对应目录下解压
cd mujoco/
tar -zxvf mujoco-3.4.0-linux-x86_64.tar.gz
c. 设置环境变量
将以下行添加到你的 ~/.bashrc 文件末尾,然后执行 source ~/.bashrc 使其生效。
export LD_LIBRARY_PATH=$LD_LIBRARY_PATH:$HOME/mujoco/mujoco-3.4.0/bin
export MUJOCO_PY_MUJOCO_PATH=$HOME/mujoco/mujoco-3.4.0
d. 安装Python接口
通过pip安装mujoco库,以便在Python中调用MuJoCo
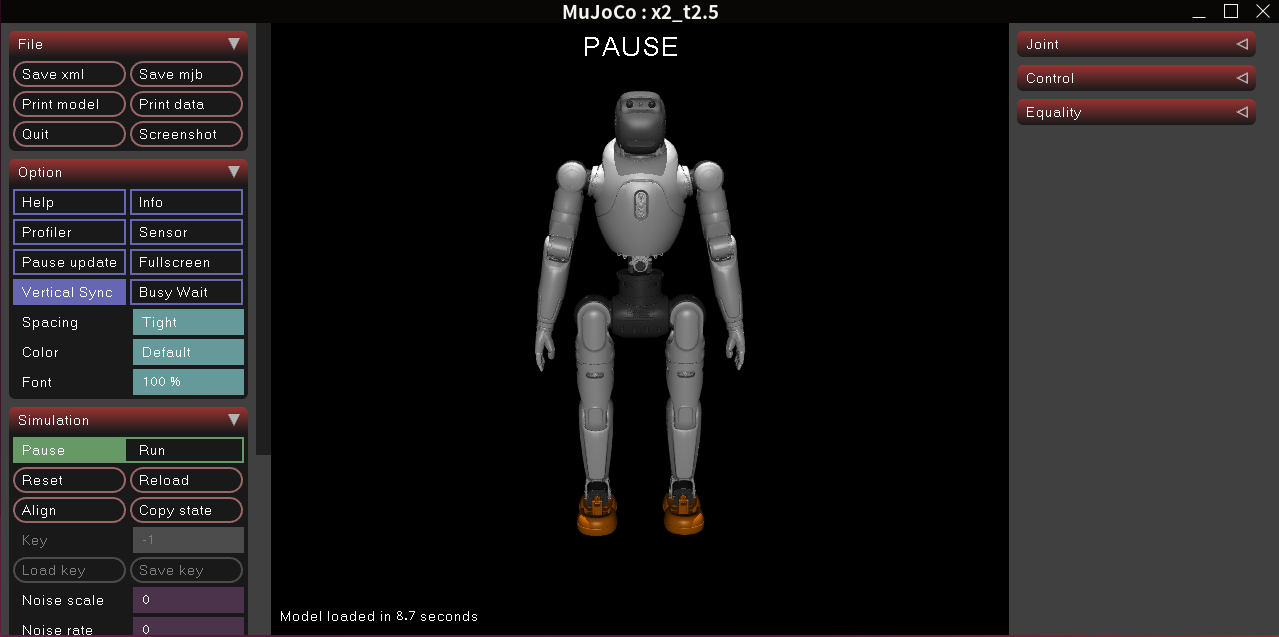
sudo pip install mujoco3.2 模型加载与显示
下载x2模型,然后通过mujoco引擎的simulate指令,引入对应模型,即可显示如下效果,自此完成了模型引入和开发环境的搭建。
cd ~/mujoco/mujoco-3.3.4/bin
./simulate ~/model/X2T2D5-251111/x2_ultra.xml
./simulate ~/model/X2T2D5-251111/x2_hand.xml
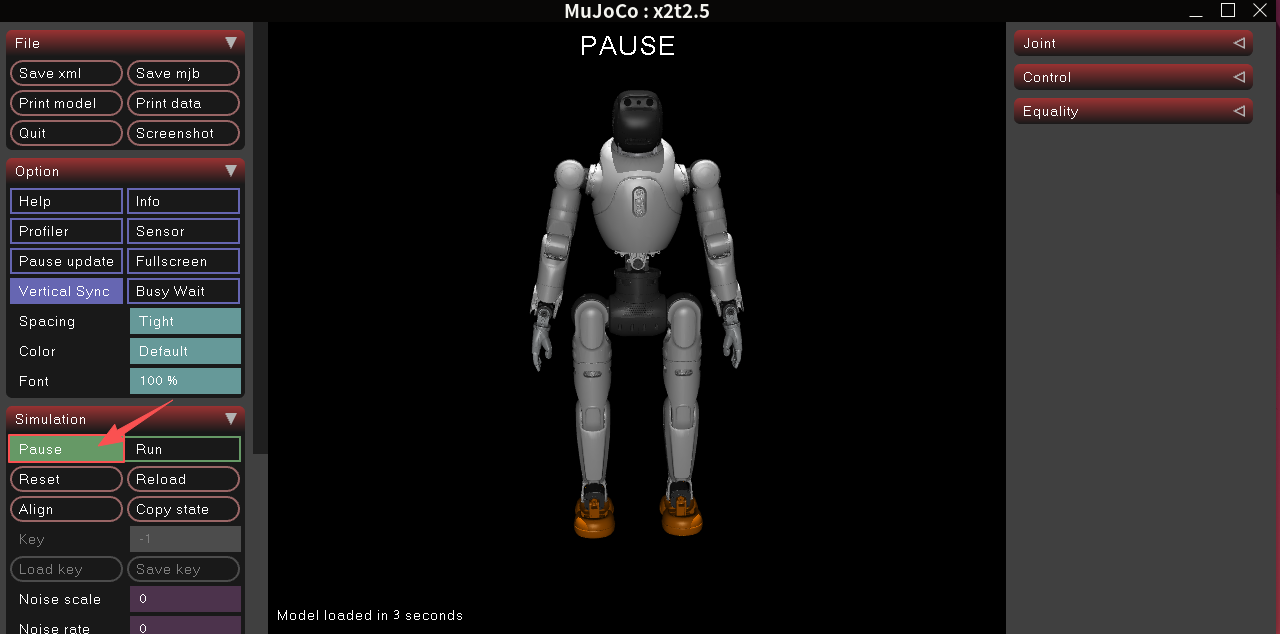
注:加载完成后需要去点击Pause,要不然机器人会快速坠落消失。
3.3 模型下载(链接或扫码)
https://agirobot.feishu.cn/share/base/form/shrcnIAXZ0DDER5tXDZCVgNVVMf

或者下载本人上传的资源:【免费】智元灵犀X2二开资源,智元X2机器人模型资源-CSDN下载

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐
 0
0 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)