本科生2周实验斩获RAL!揭秘MagPerch如何用极简设计撬动机器人顶刊
往往胜过复杂的机电堆砌。通过将仿生双稳态结构与磁吸原理深度融合,这一仅重 13.5g 的被动机构以“零能耗”的代价换取了 7.29 倍的作业续航,在抗风 60km/h 的严苛条件下完美攻克了微型无人机的驻留难题。这种遵循极简主义的设计哲学,不仅为微型无人机的野外环境监测提供了极具性价比的解决方案,也为广大处于科研起步阶段的本科生/研究生提供了一个极佳的范本——这一反常识的高效产出,有力地证明了:好
「好的科研不一定需要复杂的堆料」
目录
在机器人领域,我们往往习惯于看到复杂的控制算法或精密的机电系统。然而,发表于RAL 的 MagPerch 项目却给我们上了一堂生动的极简主义设计课。
这篇论文最令人称道之处,不仅在于其提出了一种仅重 13.5g 却能抗 60km/h 强风的被动栖息方案 ,更在于其背后体现的高效科研范式。
该工作的主要验证仅由本科生在两周的实验周期内完成。这一反常识的高效产出,有力地证明了:好的科研不一定需要复杂的堆料,精准的痛点打击(续航焦虑)与巧妙的结构设计(磁吸互锁)同样能叩开顶刊的大门。
MagPerch 巧妙地利用重力和磁力替代了耗电的电机,将无人机的视频流传输时间延长了 7.29 倍 。这种遵循极简主义的设计哲学,不仅为微型无人机的野外环境监测提供了极具性价比的解决方案,也为广大处于科研起步阶段的本科生/研究生提供了一个极佳的范本——相比于复杂的系统集成,通过快速原型验证一个精巧的物理机制,或许是通往高水平成果的捷径。
01 主要方法
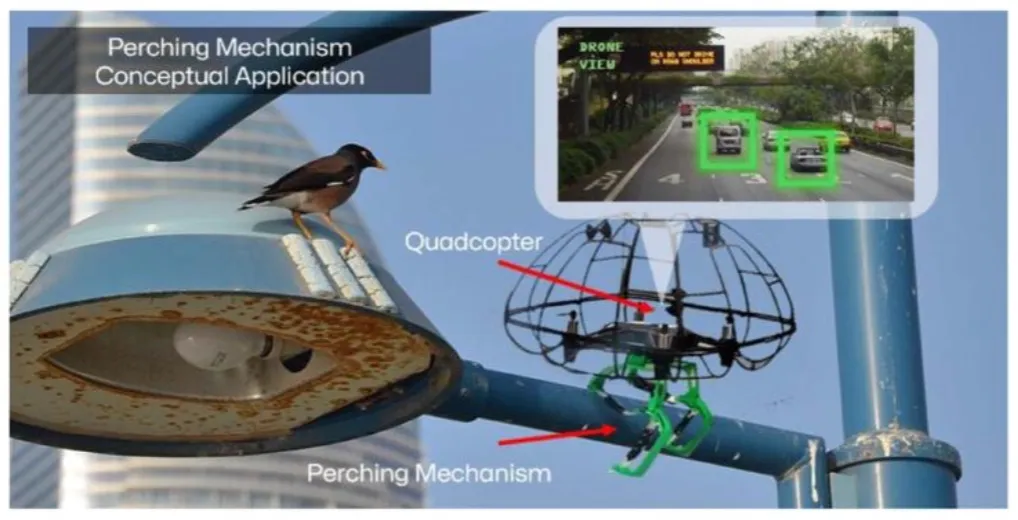
在微型无人机的应用版图中,仅有 5 到 30 分钟的电池续航一直是制约其执行长时间监测任务的最大瓶颈。为了突破这一物理限制,让无人机像鸟类一样栖息以节省能源成为了研究热点,然而现有的主动抓取机构往往因依赖电机而陷入结构复杂、自重过大且自身耗电的困境。
本文介绍的 MagPerch 系统另辟蹊径,摒弃了传统的电力驱动方案,转而采用仿鹰爪的被动双稳态结构与磁吸互锁机制。它以仅 13.5g 的极致轻量化机身,实现了在高达 60km/h 风速下的零能耗稳定驻留,将空中视频流监视的有效作业时间惊人地延长了 7.29 倍,完美诠释了在机器人结构设计中“以巧破力”的极简美学。
MagPerch 的核心设计哲学在于零能耗被动制动——它彻底摒弃了传统抓取机构对笨重且耗电的主动电机的依赖。该机制巧妙地利用无人机沉降时的重力势能以及与栖息目标接触时的碰撞动能作为驱动源,将飞行器的动能瞬间转化为机械抓取力,从而实现自主且无需电力的软着陆。
该系统的设计方法论围绕三个核心模块展开:仿生指爪被动触发机制、连杆结构力学优化设计以及磁吸互锁单元构造。
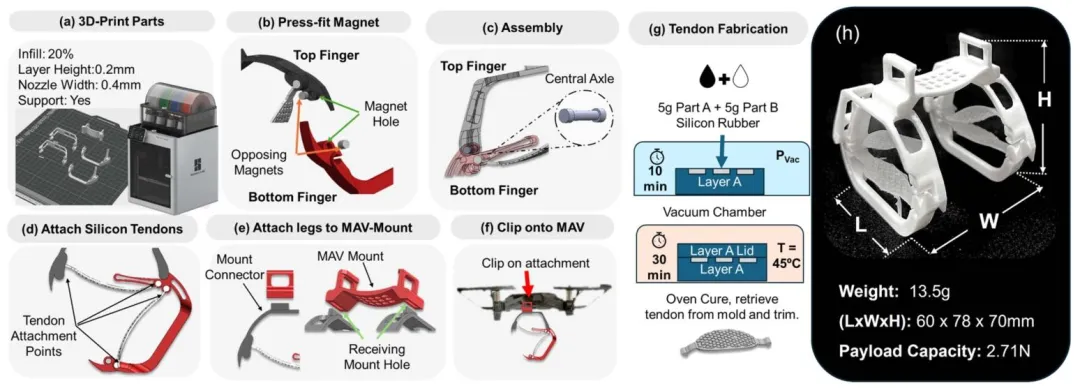
图1|MagPerch 的快速制造工艺与模块化组装详解。
1. 仿生指爪被动触发机制
设计灵感源自鹰爪的抓取反射。仿生指爪采用了类似二类杠杆的机械结构,不依赖任何电子传感器或电机驱动。
触发原理:在指爪之间连接有一根带有纹理的硅胶肌腱,它既充当防滑垫,又是触发扳机。当无人机下降并接触栖息目标(如树枝或栏杆)时,肌腱受到挤压产生拉力,带动连杆机构瞬间闭合。
多模态适应:该机制支持两种着陆模式。针对平面,利用机身下降的垂直压力闭合指爪;针对圆柱面(树枝/杆),利用肌腱接触后的张力触发闭合,实现对目标的环抱。
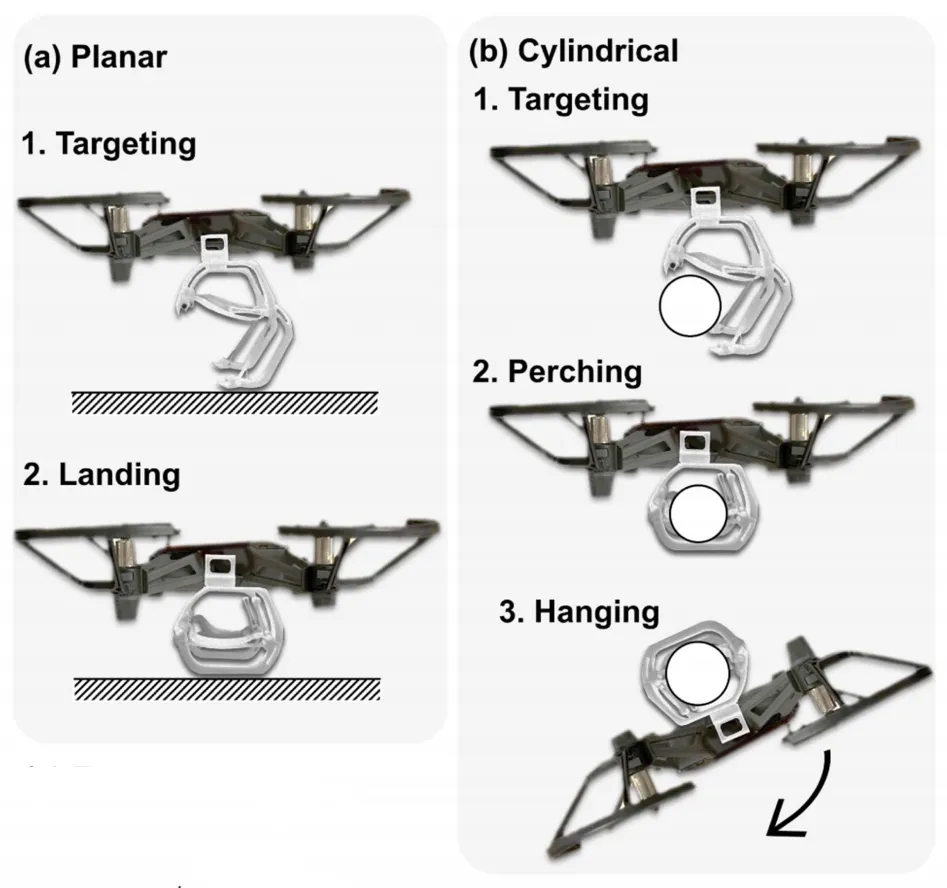
图2|MagPerch 在平面(a)与圆柱面(b)上的被动触发序列:从接触目标(Targeting)到利用重力/碰撞力完成闭合(Landing/Perching)的全过程演示。
2. 连杆结构力学优化设计
为了确保MagPerch在仅重 13.5g 的情况下仍能灵敏触发并牢固抓取,作者建立了一个简化的二类杠杆数学模型来优化指爪的几何参数。
在该模型中,无人机下落时的接触力作为输入动力,而指爪自身的重力作为阻力矩。为了保证机构能够顺利闭合(即机械优势 ),设计必须满足力矩平衡条件。根据指爪旋转过程中的机械优势公式可知:
其中,为力臂长度,
为指爪质心到支点的距离,
为指爪旋转角度,
为初始张开角度。
为了确保输入力矩始终大于重力产生的反向力矩,从而实现可靠闭合,力臂$d$的设计必须满足以下不等式:
通过代入Tello无人机的参数(重 80g)及指爪参数,作者计算出的最小值为26.4mm,从而确定了最优的力学。
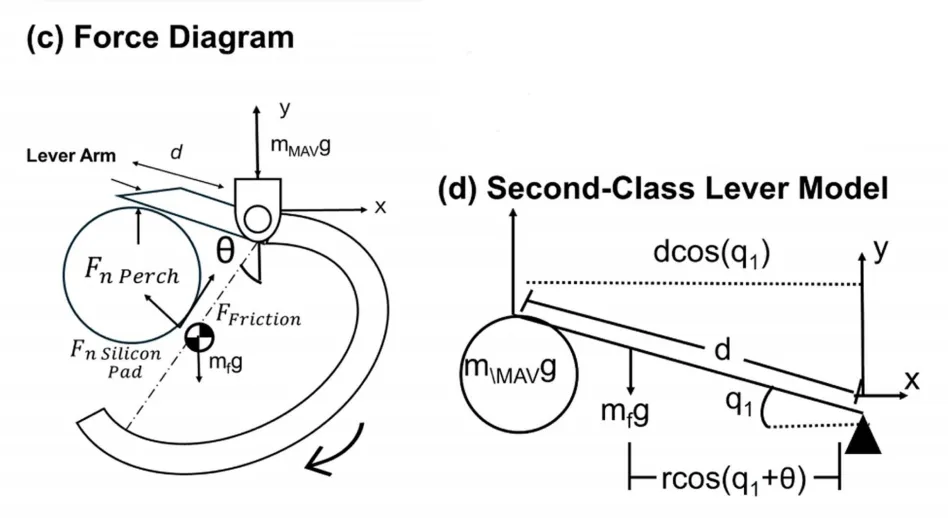
图3|MagPerch 的受力分析(c)与二类杠杆力学模型图(d)。通过优化力臂与旋转角的关系,确保碰撞瞬间的输入力矩足以克服重力阻滞实现自锁
3. 磁吸互锁单元构造
不同于传统机构持续消耗电力来维持抓力,MagPerch 采用磁吸互锁实现零能耗驻留。
磁力锁定:在指爪闭合末端嵌入直径 3mm的钕铁硼磁铁,当指爪完全闭合时,磁铁吸合产生自锁力。实验表明,该磁力配置能提供约 4.61N 的抗拉强度,远超无人机自身重量产生的重力分量。
动态稳定性:为了防止在强风或栖息瞬间的摆动导致脱落,论文还引入了向心力分析。当无人机绕栖息点摆动时,磁吸力必须克服最大的离心力,实验测得在极端摆动下产生的最大向心力约为 4.51N,仍处于磁吸锁定的安全范围内。
02 实验结果
MagPerch 的性能验证采取了“从静态力学表征到动态飞行测试”的系统化流程。实验不仅量化了磁吸互锁的可靠性边界,还重点评估了其在真实风场和野外环境下的作业效能。
1.锁定力学特性与负载边界
作者首先通过 Instron 拉力试验机对机构在水平栖息 (PO)和垂直悬挂 (HO)两种姿态下的受力情况进行了定量分析。
测试表明,随着栖息目标直径接近指爪内径(30mm),闭合所需的触发力显著增加(提升约 3.29 倍),这证实了机构对目标尺寸的几何敏感性。
在最关键的垂直悬挂姿态下,测得的最小解锁力为2.71N,最大解锁力达 4.27N。考虑到 Tello 无人机自重仅约0.8N,这意味着 MagPerch 提供了至少 3 倍以上的安全负载余量,能够有效防止因震动或轻微碰撞导致的意外脱落。
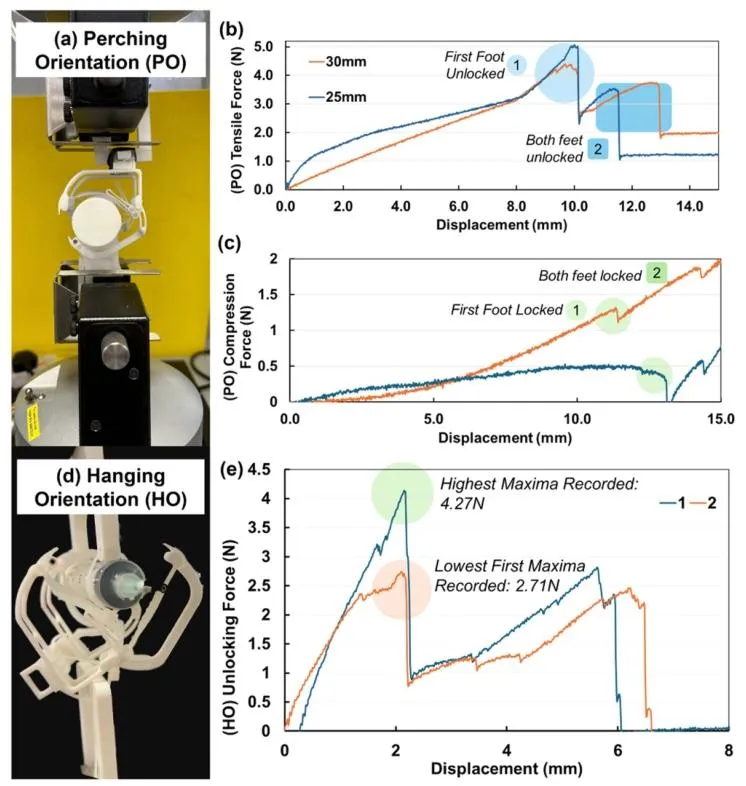
图4|MagPerch 锁定力学特性的实验表征与数据分析。利用 Instron 拉力试验机模拟无人机水平栖息时的受力环境(a); 在 25mm 与 30mm 两种栖息径下的拉伸测试结果,验证了不同管径下的自锁可靠性(b); 闭合力曲线随着栖息管径增加而增加(c);模拟无人机在极端垂直悬挂状态下的负载测试(d);状态解锁力极限曲线(e)。
2.动态摆动与抗过载能力
无人机在撞击栖息瞬间会产生剧烈的翻转运动,产生的离心力是导致栖息失败的主要原因。通过高速摄像机与运动追踪软件分析,作者确定了磁吸锁定的动态边界。在成功的栖息尝试中,机构承受的最大向心力均保持在 4.51N 以下。当角加速度过大(如无人机未施加反推力减速),产生的向心力一旦超过磁铁的吸合力(约 4.61N),指爪便会被强行拉开导致失败。在排除了传感器漂移等控制端误差后,MagPerch 的纯机械结构栖息成功率达到了 70% 。
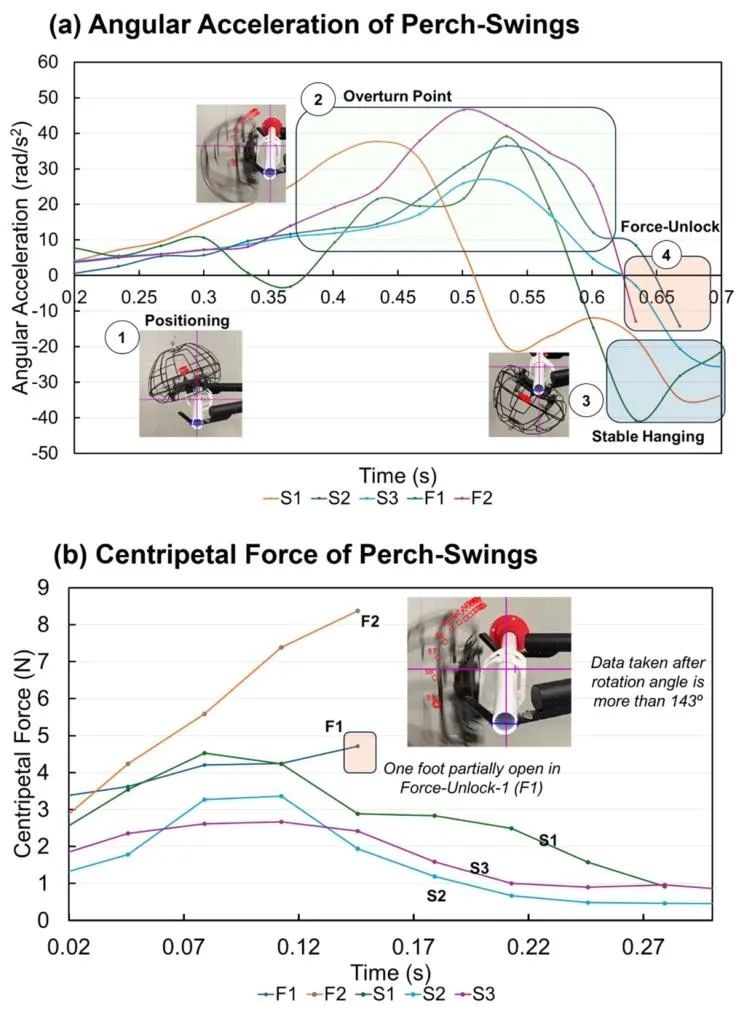
图5|栖息瞬间的动态力学分析。(a) 记录了成功(S1-S3)与失败(F1-F2)组的角加速度变化;(b) 揭示了向心力是决定栖息成败的关键,当翻转产生的离心力超过磁吸阈值时,会导致指爪意外开启。
3.环境适应性与续航效能
实验最终在户外真实环境及模拟风场中验证了系统的实用价值得益于磁吸互锁的高强度与硅胶肌腱的摩擦力,MagPerch 在风速高达 60km/h 的工业风扇直吹下仍能保持稳定悬挂,未出现脱落。
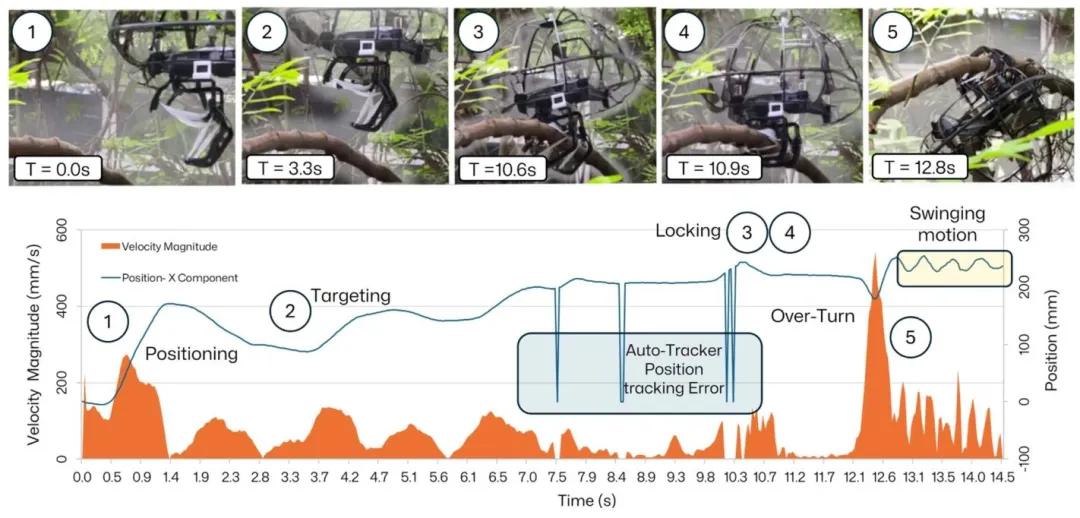
图6|户外真实场景测试流程。从图表曲线可见,无人机经历了定位(Positioning)、接触(Targeting)、剧烈翻转(Over-Turn)到最终稳定悬挂(Swinging motion)的全过程,验证了系统在非结构化环境下的鲁棒性。
通过利用 MagPerch 进行栖息监视,无人机可以将宝贵的电量从动力系统转移至视频传输。实验数据表明,相比于空中悬停,栖息模式下的视频流传输时间从 7 分钟延长至 51 分钟,实现了 7.29 倍 的续航提升。
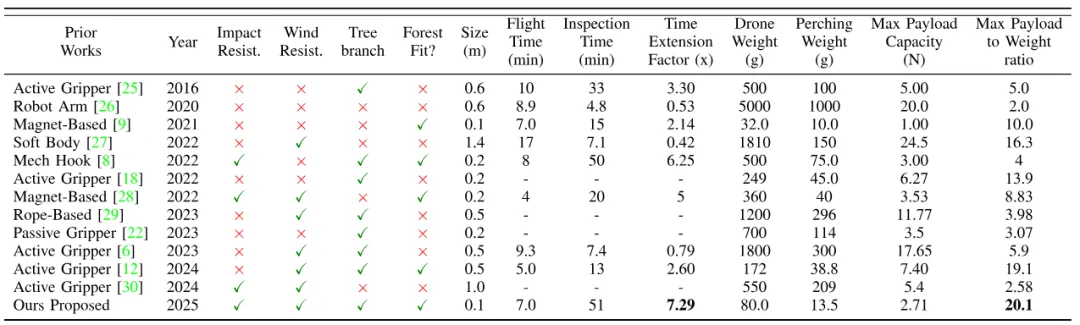
图7|不同栖息式微型飞行器的性能对比表
03 总结
MagPerch 的成功证明了极简的机械智慧往往胜过复杂的机电堆砌。通过将仿生双稳态结构与磁吸原理深度融合,这一仅重 13.5g 的被动机构以“零能耗”的代价换取了 7.29 倍的作业续航,在抗风 60km/h 的严苛条件下完美攻克了微型无人机的驻留难题 。
它不仅是精巧科研模式下诞生的杰作,更为未来环境监测与灾害救援等长周期任务,提供了一种兼具鲁棒性与高性价比的颠覆性解决方案 。
论文题目:MagPerch: A Magnetically Locked, Lightweight Perching Mechanism for Micro-Aerial-Vehicles
论文作者:Adel Lee, Yuan Shenghai, Zhefu Shen, Hongying Zhang
论文地址:https://ieeexplore.ieee.org/document/11122598/

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐

 11
11 0
0- 0



 已为社区贡献87条内容
已为社区贡献87条内容

所有评论(0)