机器人动态避障:探索与实践
动态避障,机器人动态障碍物避障程序,有四个障碍物,障碍物是移动的,程序为机器人动态障碍物避障程序,可以显示障碍物的运动轨迹以及机器人的运动轨迹在机器人的应用场景中,动态避障是一项至关重要的技能。想象一下,在一个复杂且不断变化的环境里,机器人得灵活应对四处移动的障碍物,这就好比人类在熙熙攘攘的人群中自如穿梭一样。今天,咱们就来深入聊聊这个机器人动态障碍物避障程序,它不仅能让机器人躲开移动的障碍物,还
动态避障,机器人动态障碍物避障程序,有四个障碍物,障碍物是移动的,程序为机器人动态障碍物避障程序,可以显示障碍物的运动轨迹以及机器人的运动轨迹
在机器人的应用场景中,动态避障是一项至关重要的技能。想象一下,在一个复杂且不断变化的环境里,机器人得灵活应对四处移动的障碍物,这就好比人类在熙熙攘攘的人群中自如穿梭一样。今天,咱们就来深入聊聊这个机器人动态障碍物避障程序,它不仅能让机器人躲开移动的障碍物,还能把障碍物和机器人自己的运动轨迹都展示出来。
项目背景与目标
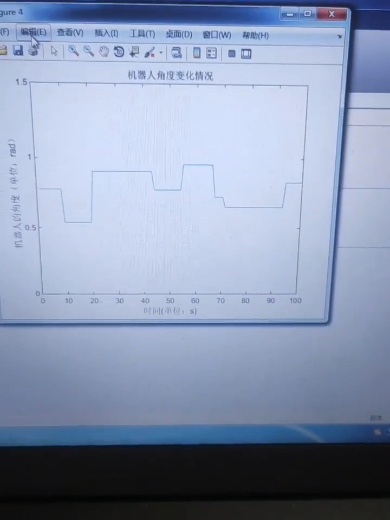
我们设定有四个移动的障碍物,机器人需要在这样的环境里安全移动,同时,我们希望直观地看到机器人和障碍物在空间中的运动路径,这对分析机器人的避障策略以及优化程序很有帮助。
关键算法与思路
实现动态避障的算法有很多,这里我们采用一种较为简单且常见的基于距离检测和方向调整的方法。机器人会持续检测与各个障碍物的距离,一旦距离过近,就及时调整方向避开。
下面我们来看看核心代码片段(这里以Python语言结合简单的模拟环境为例):
import math
# 假设机器人初始位置
robot_x = 0
robot_y = 0
# 假设障碍物初始位置和速度
obstacles = [
{'x': 10, 'y': 10, 'vx': 1, 'vy': 1},
{'x': 20, 'y': 5, 'vx': -1, 'vy': 0},
{'x': 5, 'y': 20, 'vx': 0, 'vy': -1},
{'x': 15, 'y': 15, 'vx': -1, 'vy': -1}
]
# 存储机器人运动轨迹
robot_path = []
# 存储障碍物运动轨迹
obstacle_paths = [[] for _ in range(len(obstacles))]
def distance(x1, y1, x2, y2):
return math.sqrt((x2 - x1) ** 2 + (y2 - y1) ** 2)
# 模拟运动
for _ in range(100):
min_distance = float('inf')
closest_obstacle = None
for i, obstacle in enumerate(obstacles):
dist = distance(robot_x, robot_y, obstacle['x'], obstacle['y'])
if dist < min_distance:
min_distance = dist
closest_obstacle = i
if min_distance < 5: # 设定一个安全距离阈值
# 简单的方向调整,这里朝着远离最近障碍物的方向移动
robot_x += (robot_x - obstacles[closest_obstacle]['x'])
robot_y += (robot_y - obstacles[closest_obstacle]['y'])
else:
# 正常移动,这里简单假设直线向前移动
robot_x += 1
robot_y += 1
# 更新障碍物位置
for i, obstacle in enumerate(obstacles):
obstacle['x'] += obstacle['vx']
obstacle['y'] += obstacle['vy']
# 记录轨迹
robot_path.append((robot_x, robot_y))
for i, obstacle in enumerate(obstacles):
obstacle_paths[i].append((obstacle['x'], obstacle['y']))
代码分析
- 初始化部分:我们先设定了机器人的初始位置
robotx和roboty,然后定义了四个障碍物的初始位置和速度。这里使用了一个列表obstacles,每个元素是一个字典,包含了障碍物的x坐标、y坐标、x方向速度vx和y方向速度vy。同时,我们创建了robotpath列表来存储机器人的运动轨迹,以及一个二维列表obstaclepaths来分别存储每个障碍物的运动轨迹。 - 距离计算函数:
distance函数通过勾股定理计算两个点之间的距离,这在检测机器人与障碍物之间的距离时会用到。 - 模拟运动部分:在循环模拟机器人和障碍物运动的过程中,每次循环首先找到距离机器人最近的障碍物,计算出距离。如果距离小于设定的安全阈值(这里设为5),机器人就朝着远离最近障碍物的方向移动,简单通过调整
x和y坐标来实现。如果距离大于安全阈值,机器人就按照设定的正常方向(这里是简单的直线向前)移动。同时,每个障碍物也会根据自身的速度更新位置。最后,将当前机器人和各个障碍物的位置记录到相应的轨迹列表中。
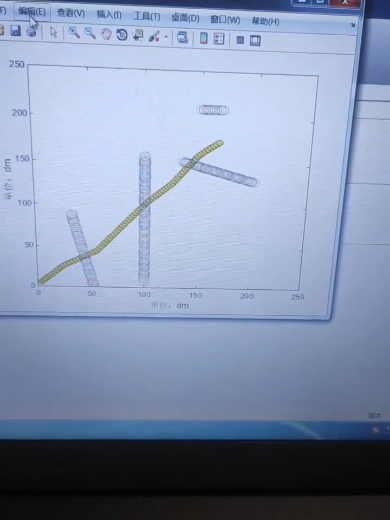
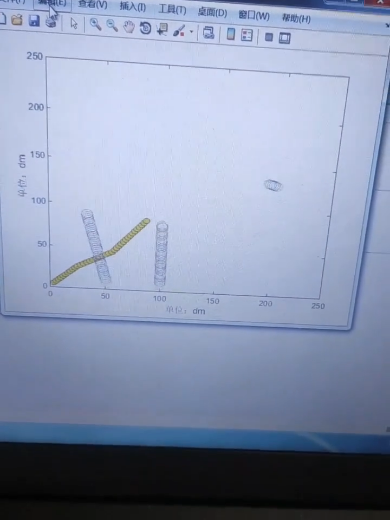
轨迹显示
要显示机器人和障碍物的运动轨迹,我们可以使用Python的绘图库,比如 matplotlib。下面是添加绘图功能的代码:
import matplotlib.pyplot as plt
# 绘制机器人轨迹
robot_x_path = [p[0] for p in robot_path]
robot_y_path = [p[1] for p in robot_path]
plt.plot(robot_x_path, robot_y_path, label='Robot Path', color='blue')
# 绘制障碍物轨迹
for i, obstacle_path in enumerate(obstacle_paths):
obstacle_x_path = [p[0] for p in obstacle_path]
obstacle_y_path = [p[1] for p in obstacle_path]
plt.plot(obstacle_x_path, obstacle_y_path, label=f'Obstacle {i + 1} Path', color=f'C{i + 1}')
plt.xlabel('X - Coordinate')
plt.ylabel('Y - Coordinate')
plt.title('Robot and Obstacles Movement Trajectories')
plt.legend()
plt.grid(True)
plt.show()
代码分析
- 提取轨迹坐标:首先从
robotpath和obstaclepaths中分别提取出x和y坐标,以便绘制轨迹。 - 绘制轨迹:使用
plt.plot函数分别绘制机器人和各个障碍物的轨迹,并为每个轨迹添加标签和颜色区分。 - 图表设置:通过设置
xlabel、ylabel、title、legend和grid等属性,让图表更加清晰和美观。最后调用plt.show()显示图表。
通过以上的程序和分析,我们初步实现了机器人在有四个移动障碍物环境中的动态避障,并能直观展示其运动轨迹。当然,实际应用中可能需要更复杂的算法和更精确的传感器数据处理,但这个简单的示例为我们理解动态避障提供了一个很好的起点。希望大家对机器人动态避障有了更深入的认识,也欢迎一起探讨优化和拓展这个程序的更多可能性。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐



 16
16 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)