探索四旋翼数模仿真LQR机器人研究方案,开启高效学习之旅
四旋翼数模仿真LQR机器人研究方案,LQR控制器,动态系统建模采用S-Function,动态显示用的机器人系统工具箱中的UAV box。PID常见而LQR方案不多见,帮助你节省时间,自己搞也许少则两三个月,多则半年才能跑通,时间更值钱。核心算法都在,建模没有解耦,没有分定高和姿态子系统,整体运算。研究学习很好的方案在机器人研究领域,四旋翼飞行器的仿真与控制一直是热门话题。今天,咱就来唠唠四旋翼数模
四旋翼数模仿真LQR机器人研究方案,LQR控制器,动态系统建模采用S-Function,动态显示用的机器人系统工具箱中的UAV box。 PID常见而LQR方案不多见,帮助你节省时间,自己搞也许少则两三个月,多则半年才能跑通,时间更值钱。 核心算法都在,建模没有解耦,没有分定高和姿态子系统,整体运算。 研究学习很好的方案
在机器人研究领域,四旋翼飞行器的仿真与控制一直是热门话题。今天,咱就来唠唠四旋翼数模仿真的LQR机器人研究方案,绝对是研究学习的好帮手,还能帮你省下不少时间。
LQR控制器:不常见却超好用
在控制算法的大家庭里,PID大家都耳熟能详,几乎随处可见。但LQR(线性二次型调节器)方案就相对小众了。不过,这并不影响它在四旋翼控制中的出色表现。LQR能够基于系统的状态反馈,通过求解黎卡提方程找到最优控制律,使得二次型性能指标最小化。简单来说,就是能让系统以最优的方式运行。
比如说,假设有一个简单的线性动态系统,状态方程为:
A = [0 1; -1 -1];
B = [0; 1];这里 A 是状态矩阵,B 是输入矩阵。通过LQR算法,我们可以找到一个反馈增益矩阵 K,让系统稳定运行。在Matlab中,使用 lqr 函数就可以轻松实现:
Q = eye(2); % 状态权重矩阵
R = 1; % 输入权重矩阵
[K, S, E] = lqr(A, B, Q, R);Q 和 R 矩阵的选择会影响系统的性能,通过调整它们的值,可以得到不同的控制效果。
动态系统建模:S - Function的魅力
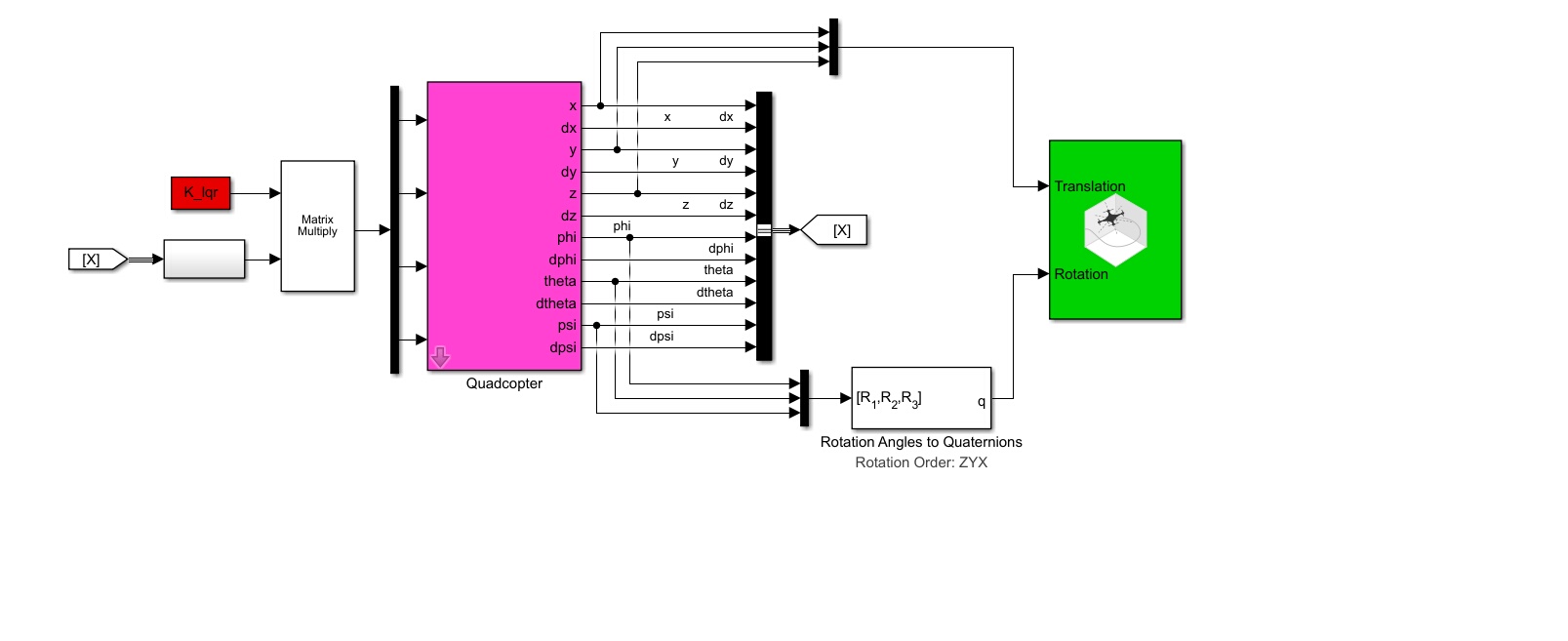
在这个研究方案里,动态系统建模采用的是S - Function。S - Function就像是一个神奇的黑盒子,允许我们使用自定义代码来描述系统的动态行为。它可以用MATLAB语言、C语言等编写,灵活性超强。
以四旋翼飞行器为例,假设我们要用MATLAB编写一个简单的S - Function来描述它的动力学模型。首先,定义S - Function的基本框架:
function [sys, x0, str, ts] = quadrotor_sfunc(t, x, u, flag)
switch flag,
case 0,
[sys, x0, str, ts] = mdlInitializeSizes;
case 1,
sys = mdlDerivatives(t, x, u);
case 3,
sys = mdlOutputs(t, x, u);
case {2, 4, 9 }
sys = [];
otherwise
error(['Unhandled flag = ',num2str(flag)]);
end在 mdlInitializeSizes 函数里,我们设置系统的状态数、输入输出数等参数。在 mdlDerivatives 函数里,编写四旋翼的动力学方程,计算状态的导数。在 mdlOutputs 函数里,定义系统的输出。通过这种方式,我们就能根据实际需求,精确地建立四旋翼的动态模型。
动态显示:UAV box的酷炫登场
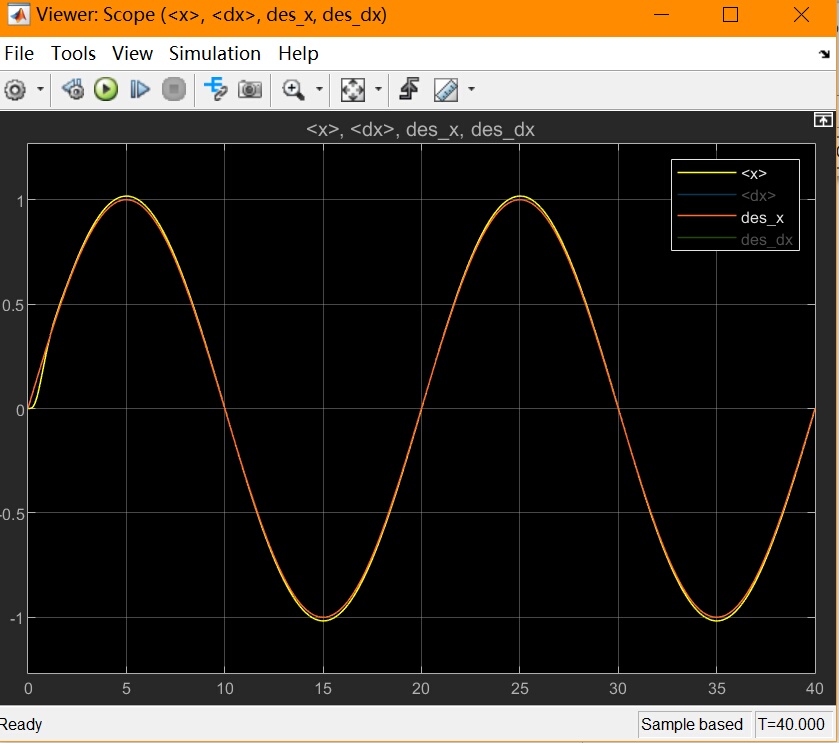
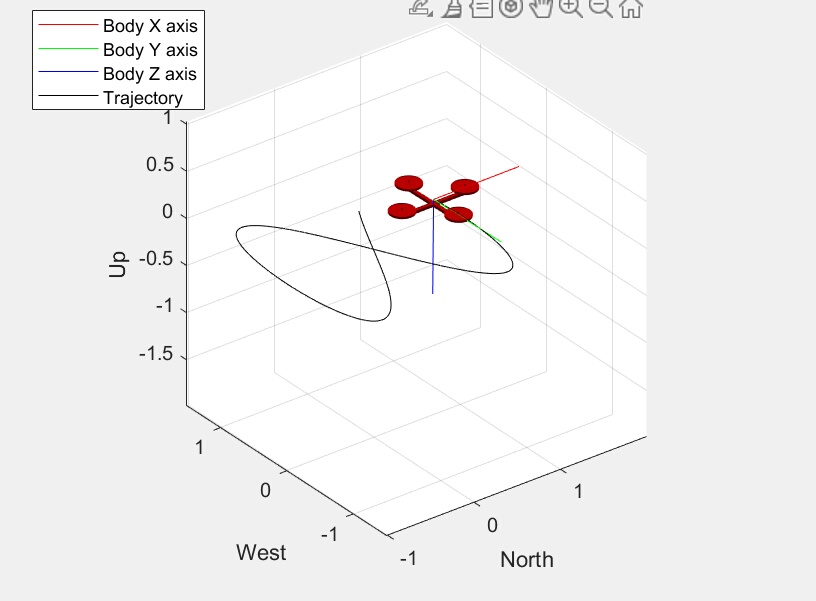
动态显示环节使用的是机器人系统工具箱中的UAV box。这东西可太方便了,它能直观地展示四旋翼飞行器的飞行姿态和轨迹,就像给我们的仿真加了一个可视化的窗口。
在MATLAB中,使用UAV box非常简单。首先加载相关的模型:
load_system('quadrotor_model.slx');然后,设置好UAV box的参数,就能实时看到四旋翼在虚拟环境中的飞行情况啦。它会根据我们设定的控制算法,动态展示飞行器的运动,让我们对控制效果一目了然。
整体方案特点:不分家的整体运算
这个研究方案的核心算法都在,而且建模没有解耦,没有分定高和姿态子系统,而是采用整体运算的方式。这样做虽然在一定程度上增加了模型的复杂性,但好处也很明显,它能够更全面地考虑各个因素之间的相互影响,避免在解耦过程中丢失一些关键信息。对于想要深入理解四旋翼整体控制原理的学习者来说,这种方式无疑是非常有帮助的。
自己摸索这样一套方案,少则两三个月,多则半年才能跑通。但现在这个方案摆在眼前,能帮你节省大量时间,把更多精力放在深入研究和优化算法上。无论是对四旋翼控制感兴趣的新手,还是想要拓展知识面的老手,这都是一个非常不错的研究学习方案,值得深入探索。希望大家都能从这个方案中收获满满,在机器人研究的道路上越走越远!

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐


 20
20 0
0- 0



 已为社区贡献5条内容
已为社区贡献5条内容

所有评论(0)