西门子PLC1500与Fanuc机器人焊装项目全解析
整个西门子PLC1500与Fanuc机器人焊装项目,是一个集多种先进技术于一体的复杂工程。无论是编程技巧如SCL算法、堆栈运用,还是不同设备间的通讯实现,都有很多值得学习和借鉴的地方。而且这个项目的程序经典,结构清晰,对于想通过实际项目积累经验的朋友来说,是个绝佳的学习素材。不过要注意,项目程序需要15.1版本以上才能打开哦。希望大家能从这个项目分享中获得启发,在自己的自动化项目中创造更多可能。
西门子PLC1500大型程序fanuc机器人焊装 包括1台 西门子1500PLC程序,2台触摸屏TP1500程序 9个智能远程终端ET200SP Profinet连接 15个Festo智能模块Profinet通讯 10台Fanuc发那科机器人Profinet通讯 3台G120变频器Profinet通讯 2台智能电能管理仪表PAC3200 4个GRAPH顺控程序 图尔克RFID总线模组通讯 和MES系统通讯,西门子安全模块 内含GSD文件,可供其他项目使用 程序经典,结构清晰,SCL算法,堆栈,梯形图,结构化编程,想学习项目累计经验时间可以借鉴思路 15.1版本以上可以打开

在自动化生产领域,西门子PLC1500与Fanuc机器人的协同作业是实现高效焊装流程的关键。今天就来跟大家详细聊聊这个大型项目,这里面涵盖了诸多复杂且有趣的技术点,相信无论是新手想学习积累经验,还是老手想温故知新,都能有所收获。
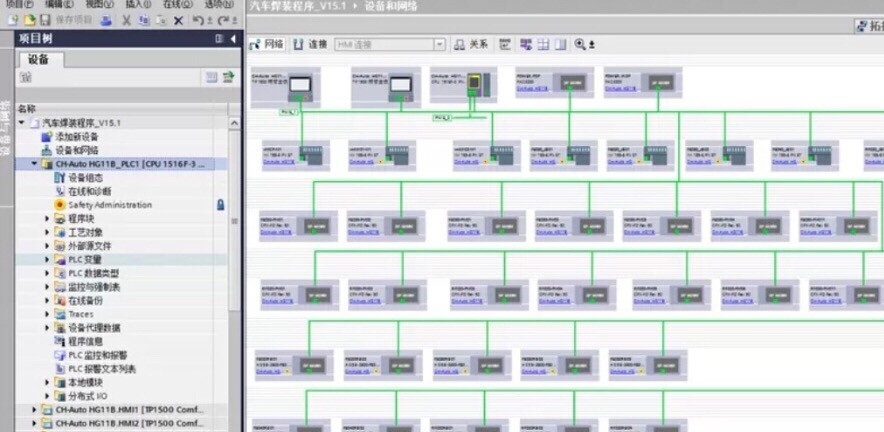
项目构成总览
这个项目可不是小打小闹,它包含了1台西门子1500PLC程序,同时搭配2台触摸屏TP1500程序来实现人机交互。从网络连接上看,有9个智能远程终端ET200SP通过Profinet连接,15个Festo智能模块、10台Fanuc发那科机器人、3台G120变频器也都通过Profinet进行通讯。另外,还有2台智能电能管理仪表PAC3200。不仅如此,项目里还有4个GRAPH顺控程序,以及涉及图尔克RFID总线模组通讯,并且要和MES系统通讯,甚至还用到了西门子安全模块。值得一提的是,项目内含GSD文件,方便应用到其他项目。
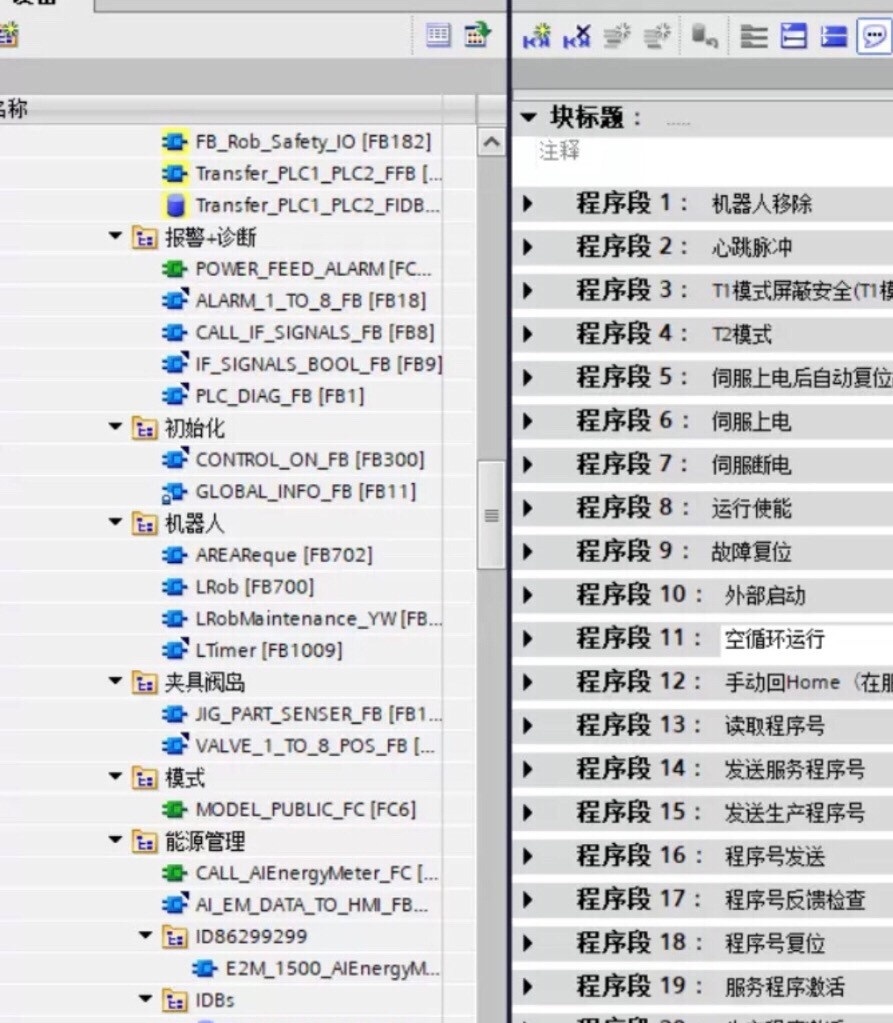
西门子1500PLC程序亮点
SCL算法魅力
项目中采用了SCL(Structured Control Language)算法,这可是个强大的工具。比如,在处理复杂的逻辑计算时,SCL就像一把利刃,能快速精准地完成任务。下面简单看段代码示例:
VAR
num1 : REAL := 10.5;
num2 : REAL := 5.2;
result : REAL;
END_VAR
result := num1 + num2;在这段代码里,我们定义了两个实数变量num1和num2,然后通过简单的加法运算,将结果赋值给result变量。SCL的语法简洁明了,对于处理数学运算、逻辑判断等复杂任务,效率极高,大大提升了编程的灵活性和代码的可读性。
堆栈的巧妙运用
堆栈在程序运行中扮演着重要角色。在处理函数调用、中断等情况时,堆栈负责存储临时数据和程序执行的上下文。虽然在PLC编程里,我们可能不会像在纯软件编程中那样直接操作堆栈指令,但理解堆栈的工作原理对于优化程序执行和排查错误至关重要。想象一下,当程序调用一个子函数时,当前的程序状态就会被压入堆栈,等子函数执行完毕,再从堆栈中弹出原来的状态,程序就可以继续准确运行。
梯形图与结构化编程结合
梯形图是PLC编程中最基础也是最常用的方式,它以类似电路图的形式呈现逻辑,直观易懂。而结构化编程则将复杂的程序分解为多个功能模块,便于管理和维护。在这个项目里,二者完美结合。比如,我们可以把机器人的运动控制部分写成一个结构化的功能块,然后在梯形图中像调用一个普通触点一样调用它。
// 假设定义一个机器人运动控制功能块FB_RobotMove
FUNCTION_BLOCK FB_RobotMove
VAR_INPUT
targetPosition : INT;
speed : INT;
END_VAR
VAR_OUTPUT
moveStatus : BOOL;
END_VAR
// 这里面实现具体的机器人运动逻辑
// 例如根据targetPosition和speed计算运动参数等
END_FUNCTION_BLOCK在梯形图中,我们就可以简单地调用这个功能块:
LD I0.0 // 假设I0.0是触发机器人运动的信号
CALL FB_RobotMove, DB1 // DB1为功能块的背景数据块
targetPosition := 100
speed := 50
moveStatus := Q0.0 // Q0.0用于反馈运动状态这样,将复杂的机器人运动控制封装在功能块里,梯形图看起来简洁清晰,而且每个功能块可以独立调试和维护,大大提高了编程效率和程序的稳定性。
不同设备通讯实现
Fanuc机器人Profinet通讯
要实现10台Fanuc发那科机器人通过Profinet通讯可不是件容易事。首先,我们得在PLC这边配置好Profinet网络,添加机器人的GSD文件,让PLC能识别机器人设备。在程序里,通过特定的通讯指令来读写机器人的数据。比如,读取机器人的当前位置信息:
VAR
robotPosition : ARRAY[1..6] OF REAL;
END_VAR
// 假设通过特定的通讯功能块FB_RobotComm来读取位置
CALL FB_RobotComm, DB2
robotID := 1 // 假设读取1号机器人位置
readPosition := TRUE
position := robotPosition这里,通过调用FB_RobotComm功能块,设置好机器人ID并请求读取位置,就能获取到机器人的6轴位置信息存储在robotPosition数组里。
其他设备通讯要点
对于15个Festo智能模块、3台G120变频器以及2台智能电能管理仪表PAC3200的Profinet通讯,原理和Fanuc机器人通讯类似,都是先在PLC中添加相应的GSD文件,配置好网络参数,然后编写程序实现数据交互。而图尔克RFID总线模组通讯则主要是通过特定的协议来读取和写入RFID标签中的数据,实现物料追踪等功能。
与MES系统通讯及安全模块
和MES系统通讯是实现生产信息化管理的关键一步。通过特定的接口协议,PLC将生产数据如产量、设备运行状态等发送给MES系统,同时也能接收MES系统下发的生产任务等指令。而西门子安全模块则是为了保障整个生产过程的安全性,防止因设备故障、人员误操作等导致的安全事故。它通过独立的安全逻辑和硬件电路,对关键信号进行监测和处理,确保在危险情况下能迅速采取安全措施,比如紧急停机等。
项目总结
整个西门子PLC1500与Fanuc机器人焊装项目,是一个集多种先进技术于一体的复杂工程。无论是编程技巧如SCL算法、堆栈运用,还是不同设备间的通讯实现,都有很多值得学习和借鉴的地方。而且这个项目的程序经典,结构清晰,对于想通过实际项目积累经验的朋友来说,是个绝佳的学习素材。不过要注意,项目程序需要15.1版本以上才能打开哦。希望大家能从这个项目分享中获得启发,在自己的自动化项目中创造更多可能。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐


 7
7 0
0- 0



 已为社区贡献6条内容
已为社区贡献6条内容

所有评论(0)