压缩trick
再逐一校验障碍物坐标,若障碍物坐标在机器人到达目标点前的路径中则返回false,否则返回true。将路径坐标编码存入集合,计算目标点在指令循环后的剩余坐标,验证其是否在单次路径中;//圈数位置 无法抵达。模拟机器人执行一次指令的路径。
lc421
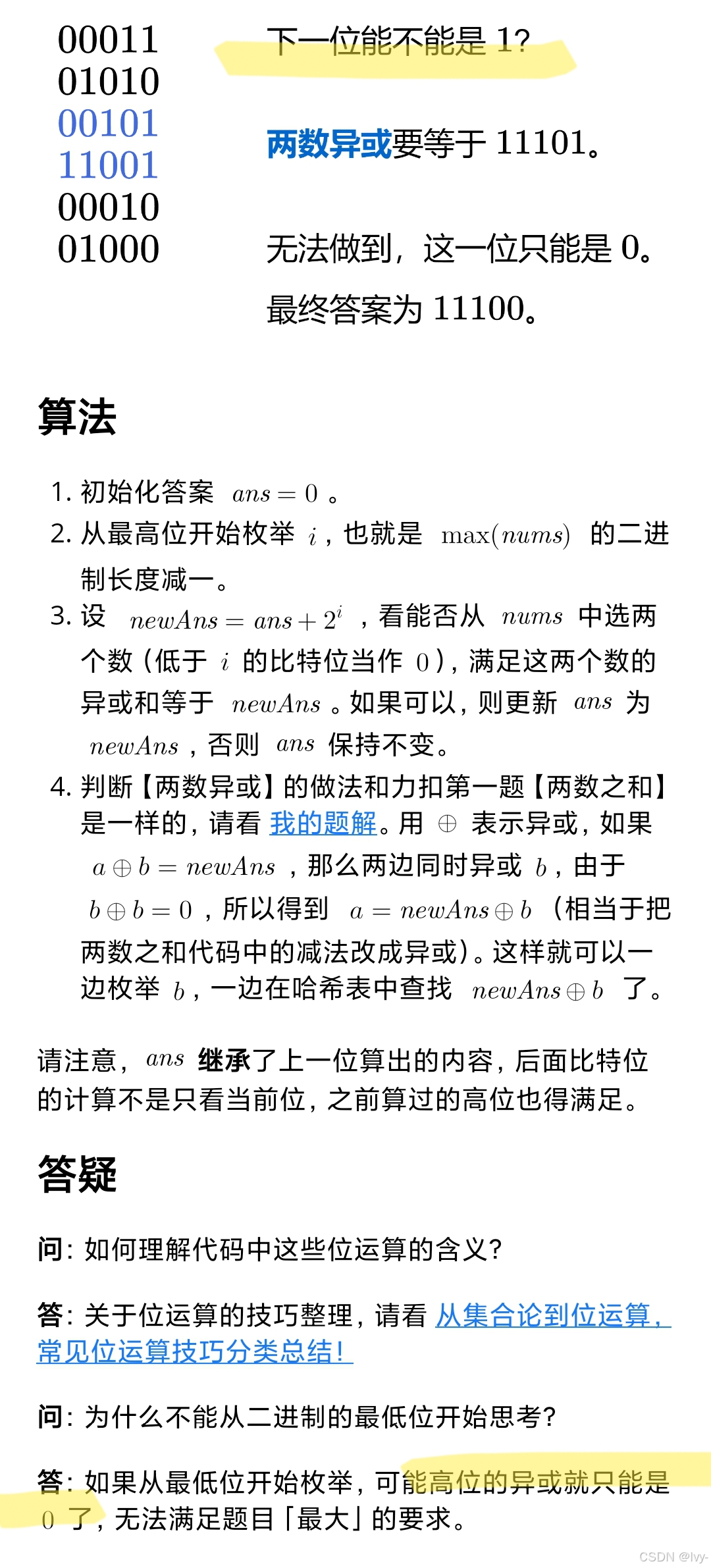
贪心+hash,从最高位到最低位逐位确定最大异或值,利用掩码保留高位、异或配对验证的方式高效求解数组中两数的最大异或结果
反复询问 下一位能不能是1
class Solution {
public:
int findMaximumXOR(vector<int>& nums) {
int high_bit = __lg(ranges::max(nums));
int ans = 0, mask = 0;
unordered_set<int> seen;
for (int i = high_bit; i >= 0; i--) {
// 从最高位开始枚举
seen.clear();
mask |= 1 << i;
int new_ans = ans | (1 << i); // 这个比特位可以是 1 吗?
for (int x : nums) {
x &= mask; // 低于 i 的比特位置为 0
if (seen.contains(new_ans ^ x)) {
ans = new_ans;
// 这个比特位可以是 1
break;
}
seen.insert(x);
}
}
return ans;
}
};
lc2225
hash统计每个选手的输场数
筛选出输场数为0和1的选手,分别排序后返回由这两类选手组成的二维数组。
class Solution {
public:
vector<vector<int>> findWinners(vector<vector<int>>& matches)
{
unordered_map<int,int> hash;
for(auto& m:matches)
{
if(!hash.count(m[0]))
hash[m[0]]=0;
hash[m[1]]++;
}
vector<vector<int>> ret(2);
for(auto& [a,b]:hash)
{
if(b==0) ret[0].push_back(a);
if(b==1) ret[1].push_back(a);
}
ranges::sort(ret[0]);
ranges::sort(ret[1]);
return ret;
}
};
lcp3
模拟机器人执行一次指令的路径将路径坐标编码存入集合,计算目标点在指令循环后的剩余坐标,验证其是否在单次路径中;
再逐一校验障碍物坐标,若障碍物坐标在机器人到达目标点前的路径中则返回false,否则返回true
压缩tricks
st.insert(((long)cx << 30) | cy);
int cir = min(x / cx, y / cy);
class Solution {
public:
bool robot(string cmd, vector<vector<int>>& obs, int x, int y)
{
unordered_set<long> st;
int cx = 0, cy = 0;
st.insert(0);
for (char c : cmd) {
if (c == 'U') cy++;
else if (c == 'R') cx++;
st.insert(((long)cx << 30) | cy);
}
int cir = min(x / cx, y / cy);
if (!st.count(((long)(x - cir * cx) << 30) | (y - cir * cy)))
return false; //圈数位置 无法抵达
for (auto& v : obs) {
if (v.size() != 2) continue;
if (v[0] > x || v[1] > y) continue;
cir = min(v[0] / cx, v[1] / cy);
if (st.count(((long)(v[0] - cir * cx) << 30) | (v[1] - cir * cy)))
return false;
// 障碍物位置 在移动集合中
}
return true;
}
};

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐
 5
5 0
0- 0



 已为社区贡献7条内容
已为社区贡献7条内容

所有评论(0)