SO101 机械臂 3D 打印组装与中位校准实操
0x00 前言
Lerobot(一) 项目介绍——SO101机械臂最低成本体验具身智能;
上一篇博客发布至今已近一个月,上期为大家介绍了项目背景,本期将进入实操环节,详细讲解 SO-101 机械臂的组装过程,也是对自己阶段性的一个总结;
全文会围绕以下要点展开:
- 物料购买指南、
- 3D 打印件及参数配置、
- 实体 / 虚拟舵机的区别、
- SAM 与 SO101 机械臂的区别,
- 以及最重要的机械臂中位校准步骤。
0x01 物料购买指南
SO-101 是 SO-100 机械臂的下一代版本,最初由 RobotStudio 与 Hugging Face 合作设计。它改进了接线,更易于组装(无需拆卸齿轮),并且为引臂使用更新的电机。相比 SO100,SO101 无需额外拆卸舵机齿轮,这一设计大幅降低了组装难度,让我们的机械臂组装过程变得更加便捷。
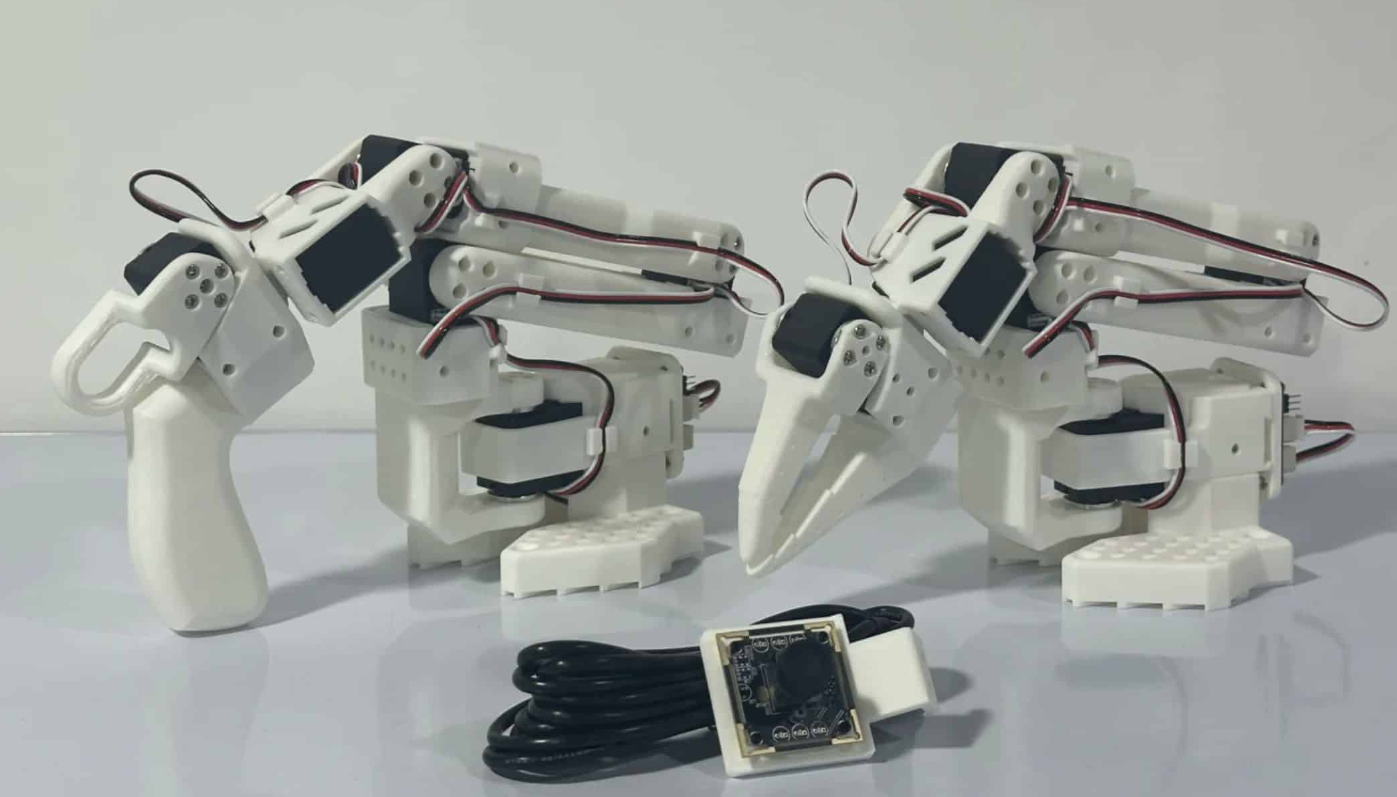
整个具身示教系统包含两大核心部件:一是两台机械臂,分别为 follower(从动臂,位于上图右侧)与 leader(主动臂,位于上图左侧);二是用于采集训练数据的摄像头,该系统至少需配备两个,具体为 top(全景摄像头)和 wrist_left(手臂左侧摄像头)。
从动臂follower 使用6个相同减速比的舵机,STS3215 1/345 7.4V(C001)
而主动臂leader 使用3种不同减速比的舵机,STS3215 伺服 7.4V,1/191 齿轮 (C044),STS3215 1/345 7.4V(C001) ,STS3215 伺服 7.4V,1/147 齿轮 (C046)
| Leader-Arm Axis | Motor ID | Gear Ratio |
|---|---|---|
| Base / Shoulder Pan (底座/肩盘 ) | 1 | 1 / 191 |
| Shoulder Lift ( 肩部提升 ) | 2 | 1 / 345 |
| Elbow Flex ( 肘部弯曲 ) | 3 | 1 / 191 |
| Wrist Flex (腕关节附仰角 ) | 4 | 1 / 147 |
| Wrist Roll (腕关节翻滚角) | 5 | 1 / 147 |
| Gripper (夹爪) | 6 | 1 / 147 |
不需要购买额外的螺丝,使用舵机自带的舵机盘螺丝就可以完成组装;
除了电机之外,我们还需要购买舵机控制板和电源。
主臂和从臂使用相同的电机控制板,相同的电源(5V4A);
此外还需要连接电脑的USB数据线两根,主臂和从臂各一根;



还需要4个桌夹,用于固定两个机械臂,这里使用3D打印,模型文件MmakerWorld上找到,打印那个大的小的可能装不下;

参考模型链接:锤式夹具,L-XL 尺寸,坚固 来自 vajcnerd MakerWorld:免费下载 3D 模型
主动臂:
| 名称 | 数量 | 单价 | 总价 |
| STS3215 1/191 7.4V | 2 | 96.3 | 192.6 |
| STS3215 1/345 7.4V | 1 | 96.3 | 96.3 |
| STS3215 1/147 7.4V | 3 | 96.3 | 288.9 |
| 舵机控制板 | 1 | 26.19 | 26.19 |
| USB-C数据线 | 1 | 0 | 0 |
| 供电5V 4A | 1 | 22.31 | 22.31 |
从动臂:
| STS3215 1/345 7.4V | 6 | 96.3 | 577.8 |
| 舵机控制板 | 1 | 26.19 | 26.19 |
| 供电5V 4A | 1 | 22.31 | 22.31 |
其他固定件:
| G型号固定架 | 2 |
购买这些舵机、控制板和电源,共计花费1252.6元;
0x02 3D打印件及参数配置

机械臂打印件可从github上下载,路径如下图所示:
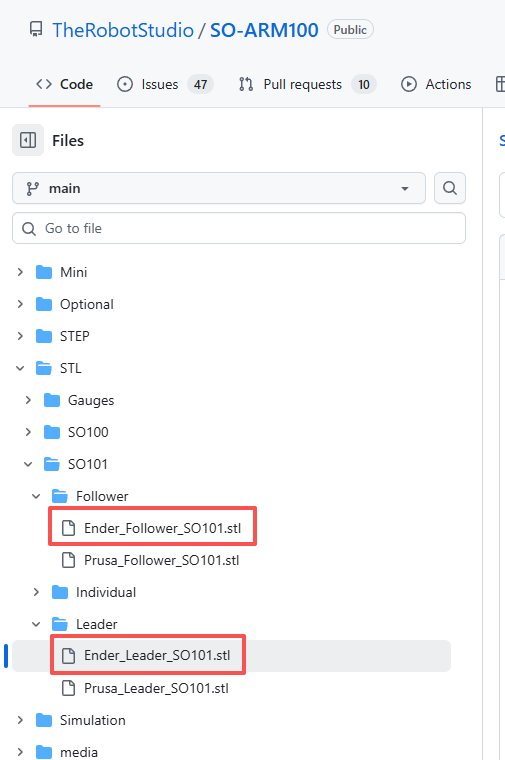
主臂和从臂使用的3D打印机几乎相同,不同的地方在末端执行器,主动臂使用的是一个手柄用于引导,而从动臂使用的是夹爪用于跟随;
主动臂和从动臂的3D打印参数如下:
点击链接SO101 机械臂 3D 打印组装与中位校准实操阅读原文

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐


 15
15 0
0- 0



 已为社区贡献15条内容
已为社区贡献15条内容

所有评论(0)