打造属于你的 SLAM 仿真环境:从 Gazebo 到一键启动
打造属于你的 SLAM 仿真环境:从 Gazebo 到一键启动
学习 SLAM(即时定位与地图构建)时,最头疼的莫过于环境搭建和节点管理。本文将带你回顾一个 ROS 项目的搭建过程,我们从一个基础的 Gazebo 仿真开始,最终实现了一个高度集成、一键启动、并且连键盘控制都经过优化的 SLAM 仿真平台。
1. 项目目标:告别繁琐,专注算法
在 ROS 中运行一套完整的 SLAM 系统,通常意味着要打开一堆终端,手动敲下一连串 roslaunch 和 rosrun 命令。这个过程不仅繁琐,而且容易出错。我们的核心目标就是解决这个问题,打造一个满足以下条件的仿真环境:
- 集成化:在一个工作空间内,包含仿真环境、机器人模型和 SLAM 算法。
- 自动化:用一个脚本启动所有必要节点,无需手动干预。
- 易用性:对控制方式等细节进行优化,让交互更自然。
我们选用的技术栈是:
- 仿真平台: Gazebo 11
- ROS 版本: ROS Noetic (Ubuntu 20.04)
- 机器人模型: Scout UGV (四轮差速小车)
- SLAM 算法:
lightning-lm(一个基于 faster-LIO 的激光雷达-IMU SLAM 实现)
2. 三大核心组件
a) Gazebo 世界与机器人
一切的基础是仿真环境。我们通过 scout_gazebo 包来定义 Gazebo 世界和 Scout 机器人模型。值得一提的是,世界文件(.world)是可以自由替换的。在本项目中,我们修改了 scout_gazebo.launch 文件,使其加载一个特定的地图:
<!-- in scout_gazebo.launch -->
<include file="$(find gazebo_ros)/launch/empty_world.launch">
<arg name="world_name" value="/home/wh/slam/SLAMandGuide/SLAMandGuide/src/robot_model/world/testWorld1.world" />
</include>
同时,机器人的 URDF 文件 (base.xacro) 中定义了所有硬件传感器的物理位置,这是后续 SLAM 算法正确运行的关键。
b) SLAM 算法:lightning-lm
lightning-lm 是我们建图和定位的“大脑”。它订阅来自 Gazebo 仿真出的传感器数据(点云和 IMU),然后实时计算机器人的位姿并构建三维地图。其核心配置文件是 velodyne_online.yaml,里面定义了算法的所有参数,其中最重要的一个就是传感器外参:
# in velodyne_online.yaml
extrinsic_T: [ -0.17, 0, 0.255 ] # 雷达相对于 IMU 的平移
extrinsic_R: [ 1, 0, 0, 0, 1, 0, 0, 0, 1 ] # 旋转矩阵
这个外参必须与 URDF 模型中定义的物理位置精确匹配,否则会导致建图失败。我们通过解析 URDF 文件,计算出了雷达相对于 IMU 的真实平移为 [-0.17, 0, 0.255] 米,并更新了此配置。
c) RViz:可视化一切
RViz 是 ROS 的“眼睛”,它让我们能直观地看到 SLAM 算法的输出,例如实时点云、构建的地图、机器人的轨迹等。一个好的 RViz 配置文件能极大地提升调试效率。
3. “一键启动”的魔法:start_slam_tabs.sh
这是整个项目的灵魂。我们没有把所有节点都塞进一个巨大的 .launch 文件,而是编写了一个 Bash 脚本,利用 gnome-terminal 的能力,在不同的选项卡中分别启动各个组件。
#!/usr/bin/env bash
WS_ROOT="$( cd "$( dirname "${BASH_SOURCE[0]}" )" && pwd )"
function new_tab() {
local TITLE=$1
local CMD=$2
gnome-terminal --tab --title="${TITLE}" -- bash -c "source \"${WS_ROOT}/devel/setup.bash\"; ${CMD}; exec bash"
}
# 依次启动 roscore, Gazebo, SLAM, RViz, Teleop
new_tab "roscore" "roscore"
sleep 2
new_tab "gazebo" "roslaunch scout_gazebo scout_gazebo.launch"
sleep 5
new_tab "lightning_slam" "roslaunch lightning run_slam_velodyne_online.launch"
# ... and so on
这样做的好处显而易见:
- 职责分离:每个选项卡只负责一个节点,输出日志清晰,方便定位问题。
- 启动顺序控制:通过
sleep命令,可以确保 roscore 和 Gazebo 等基础服务完全启动后,再加载 SLAM 节点,避免了因节点启动时机不对导致的错误。 - 环境隔离:每个 Tab 内的命令都自动
source了工作空间的setup.bash,确保环境正确。
4. 细节优化:让键盘控制更顺手
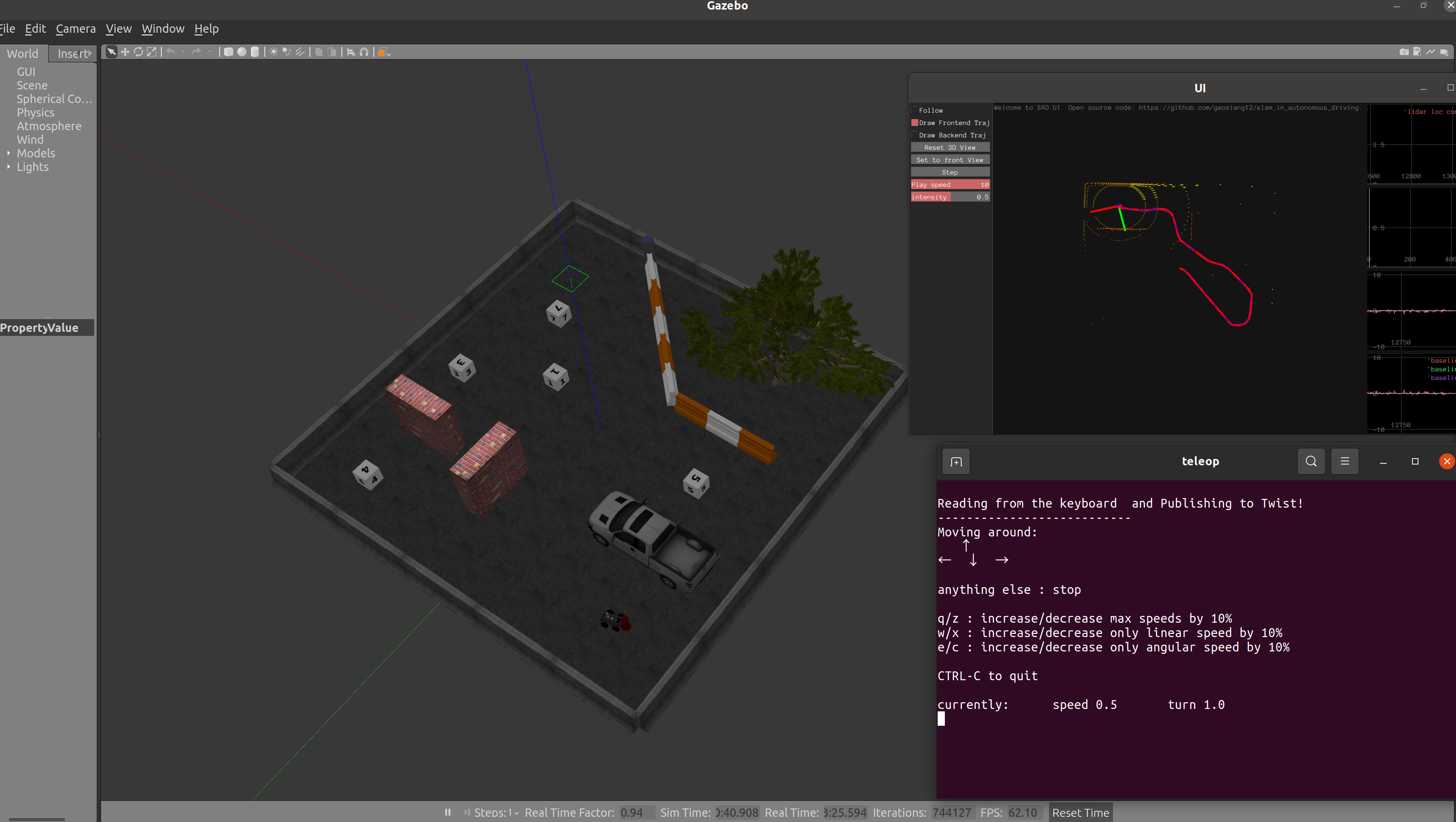
ROS 默认的 teleop_twist_keyboard 使用 i,j,k,l 来控制移动,这对于不熟悉的用户来说很不直观。我们希望改用上下左右箭头键。
由于直接修改 ROS 系统文件并非最佳实践,我们采取了以下步骤:
- 复制:将
/opt/ros/noetic/lib/teleop_twist_keyboard/teleop_twist_keyboard.py脚本复制到我们自己包的scripts目录下。 - 授权:
chmod +x使其变为可执行文件。 - 修改:
- 首先,修改
getKey函数,使其能够读取箭头键产生的特殊转义序列(例如,上箭头是\x1b[A)。 - 然后,在
moveBindings字典中,添加这些转义序列与对应运动的映射。
- 首先,修改
- 重定向:最后,修改
start_slam_tabs.sh脚本,让它运行我们本地修改过的版本 (rosrun scout_gazebo teleop_twist_keyboard.py),而不是系统版本。
通过这个小小的改造,整个仿真平台的体验得到了极大的提升。
5. 总结与展望
通过这个项目,我们不仅搭建了一个功能完善的激光 SLAM 仿真平台,更重要的是,我们通过脚本和定制化,将一个复杂的多节点系统,封装成了一个“一键启动”的简单应用。
这套流程展示了 ROS 开发中的一个重要思想:将复杂性内聚,提供简洁的接口。无论是 для 自己做算法验证,还是分享给团队成员,这样的封装都能极大地提高效率。
未来,你还可以在此基础上继续扩展:
- 集成路径规划和导航模块。
- 设计更复杂的 Gazebo 世界来测试 SLAM 的鲁棒性。
- 尝试替换或对比不同的 SLAM 算法。
希望这篇文章能给你在学习和使用 ROS/SLAM 的道路上带来一些启发!

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐

 15
15 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)