探索 3 - RPS 并联机器人的奇妙仿真之旅
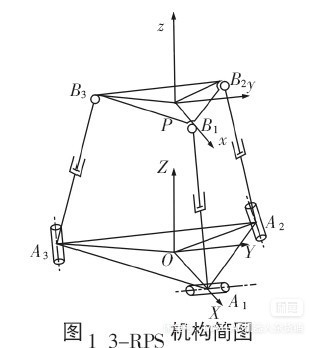
3 - RPS 机构由三个 RPS 支链组成,R 代表转动副(Revolute joint),P 代表移动副(Prismatic joint),S 代表球面副(Spherical joint)。这种结构使得机器人在空间中具备多个自由度的运动能力,广泛应用于诸如精密定位、飞行模拟等领域。
并联机器人,3-RPS机构运动仿真,三维仿真。 simscape,simulink,matlab。 工作空间分析,运动分析。 轨迹控制。
在机器人的世界里,并联机器人以其独特的结构和出色的性能备受瞩目。今天咱就来唠唠 3 - RPS 机构的并联机器人,通过 MATLAB 中的 Simscape 和 Simulink 对其进行三维运动仿真,同时深入分析工作空间和运动特性,再探讨下轨迹控制的实现。
一、3 - RPS 机构简介
3 - RPS 机构由三个 RPS 支链组成,R 代表转动副(Revolute joint),P 代表移动副(Prismatic joint),S 代表球面副(Spherical joint)。这种结构使得机器人在空间中具备多个自由度的运动能力,广泛应用于诸如精密定位、飞行模拟等领域。
二、基于 Simscape 和 Simulink 的三维仿真搭建
1. Simscape 基础设置
Simscape 是基于物理建模的一个工具包,它让我们能更直观地搭建机械系统。首先,我们要在 Simulink 中创建一个新模型,然后在 Simscape 库中拖入所需的关节模块。
% 创建 Simulink 模型
model = '3_RPS_robot_simulation';
new_system(model);
open_system(model);2. 搭建 3 - RPS 机构模型
从 Simscape Multibody 库中拖出三个 RPS 支链模块,分别连接好转动副、移动副和球面副,并设置每个关节的参数,比如关节的初始位置、运动范围等。
% 连接 RPS 支链
rps1 = add_block('simscape/Simscape Multibody/Revolute Prismatic Spherical Joint', [model '/RPS1']);
rps2 = add_block('simscape/Simscape Multibody/Revolute Prismatic Spherical Joint', [model '/RPS2']);
rps3 = add_block('simscape/Simscape Multibody/Revolute Prismatic Spherical Joint', [model '/RPS3']);这里每个 RPS 支链模块就像是机器人的一条“腿”,它们的协同运动决定了机器人末端执行器的位置和姿态。
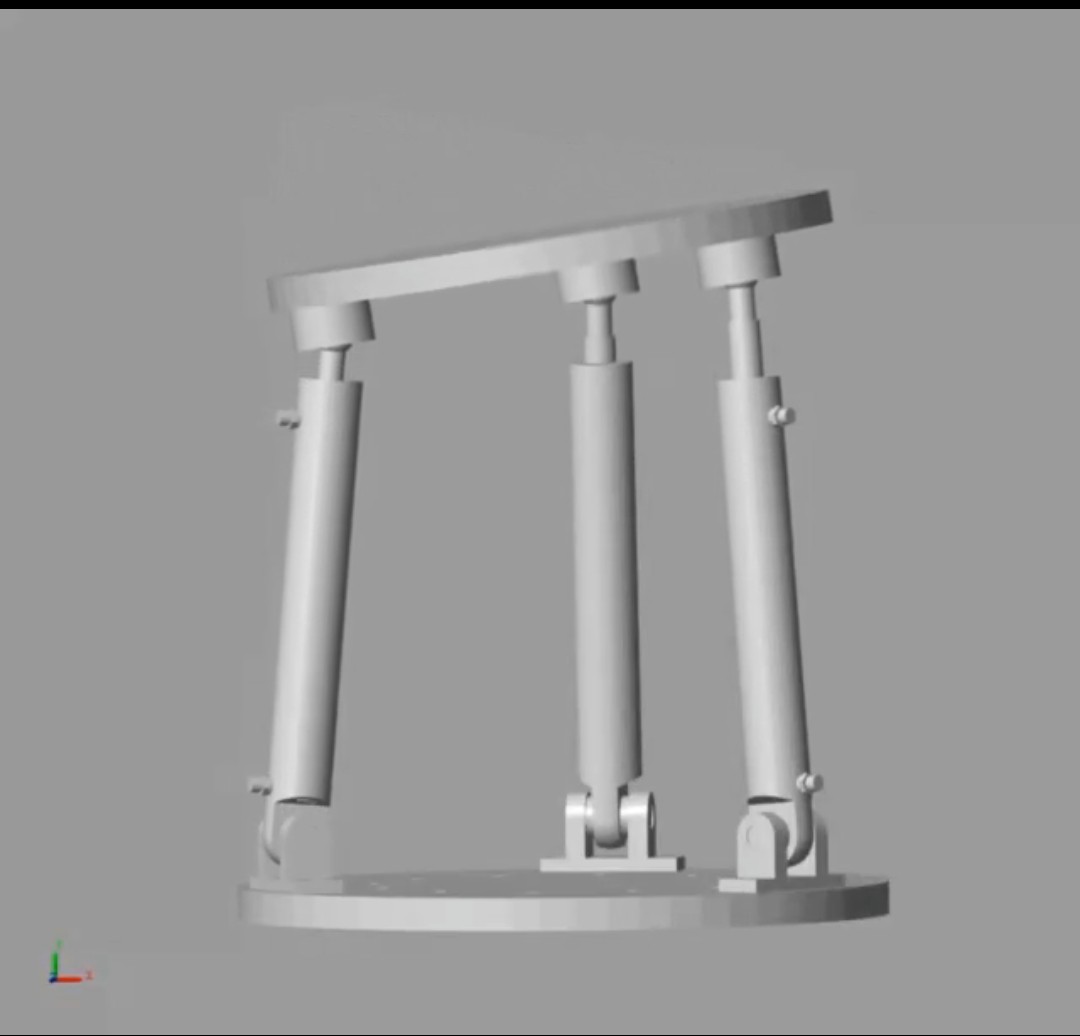
3. 添加三维可视化
为了更直观地看到机器人的运动,我们利用 Simscape Multibody 的三维可视化功能。从库中拖入“3D 动画”模块,并将其与机器人模型连接。
% 添加三维动画
animation = add_block('simscape/Simscape Multibody/3D Animation', [model '/3D Animation']);这样,运行仿真时就能在三维视图中看到 3 - RPS 机器人活灵活现地运动啦。
三、工作空间分析
工作空间是机器人末端执行器能够到达的空间范围。对 3 - RPS 机器人来说,分析工作空间非常重要,它决定了机器人在实际应用中的操作范围。
我们可以通过改变每个支链的关节变量,然后计算末端执行器的位置,从而确定工作空间的边界。下面这段代码简单模拟了通过改变移动副关节变量来观察末端位置的变化。
% 工作空间分析代码示例
p1 = 0:0.01:1; % 移动副关节变量范围
num_points = length(p1);
end_effector_positions = zeros(num_points, 3);
for i = 1:num_points
% 假设这里有计算末端位置的函数 calculate_end_effector_position
end_effector_positions(i, :) = calculate_end_effector_position(p1(i));
end通过对大量数据点的计算,我们可以绘制出工作空间的形状,比如用 MATLAB 的绘图函数画出三维的工作空间边界。这就像给机器人的活动范围画了一个“圈”,让我们清楚知道它能“跑”多远。
四、运动分析
运动分析主要关注机器人在运动过程中的速度、加速度等参数。在 Simulink 仿真中,我们可以通过在关节模块中添加传感器来获取这些信息。
% 添加速度传感器
velocity_sensor1 = add_block('simscape/Simscape Multibody/Sensors and Actuators/Linear Velocity Sensor', [model '/Velocity Sensor1']);
connect_blocks(model, 'RPS1/Prismatic joint', 'Velocity Sensor1/Flange');有了速度传感器的数据,我们就能绘制出速度随时间变化的曲线,了解机器人在不同时刻的运动快慢。加速度分析同理,通过添加加速度传感器并获取数据进行分析。这就好比我们在观察机器人“跑”的过程中,它是如何加速和减速的。
五、轨迹控制
轨迹控制是让机器人按照我们期望的路径运动。比如在工业生产中,机器人可能需要沿着特定的曲线去抓取或放置物体。
在 Simulink 中,我们可以使用 PID 控制器来实现轨迹控制。首先定义期望的轨迹,然后将实际位置与期望位置的误差输入到 PID 控制器中,通过调整控制参数,让机器人尽可能地跟随期望轨迹。
% PID 控制器参数设置
kp = 10;
ki = 1;
kd = 0.1;
% 假设 error 为实际位置与期望位置的误差
u = kp * error + ki * cumsum(error) + kd * diff([0 error]);这里的 kp、ki、kd 分别是比例、积分、微分系数,通过不断调整这些系数,我们就能让机器人更好地追踪轨迹,就像给机器人设定了一个“导航”,让它沿着我们规划的路线精准“行驶”。
通过以上在 MATLAB 的 Simscape 和 Simulink 环境下对 3 - RPS 并联机器人的运动仿真、工作空间分析、运动分析以及轨迹控制的探索,我们对这种机器人有了更深入的了解,也为其实际应用提供了有力的理论和仿真基础。希望大家也能在这个充满趣味的机器人仿真世界里探索出更多奇妙的成果!

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐
 10
10 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)