基于ROS系统的多机器人融合建图程序探索
多机器人协同,多机器人编队,地图融合,基于ROS系统的多机器人融合建图程序,旨在解决多机器人协同建图过程中的问题,提高建图效率和精度。通过该程序,用户可以将多台机器人联合起来进行协同建图,并且实现对多个机器人建图数据进行融合处理,生成一张完整的地图。该程序采用分布式系统架构,能够同时处理多个机器人的建图数据,具有良好的扩展性和可靠性。在算法方面,程序使用了SLAM自主建图技术,基于坐标变换的地图对
多机器人协同,多机器人编队,地图融合,基于ROS系统的多机器人融合建图程序,旨在解决多机器人协同建图过程中的问题,提高建图效率和精度。 通过该程序,用户可以将多台机器人联合起来进行协同建图,并且实现对多个机器人建图数据进行融合处理,生成一张完整的地图。 该程序采用分布式系统架构,能够同时处理多个机器人的建图数据,具有良好的扩展性和可靠性。 在算法方面,程序使用了SLAM自主建图技术,基于坐标变换的地图对齐方法,能够在复杂环境中准确地重建二维地图。 同时,该程序使用激光雷达用DWA和TEB算法导航壁障。 注意: 该程序仅适用于Ubuntu18及Ubuntu16系统,20以上的系统ros仿真存在Bug(官方说明)
在机器人领域,多机器人协同作业一直是研究的热点,尤其是多机器人编队与地图融合,对于提高工作效率和任务完成质量有着重大意义。今天就来聊聊基于ROS系统的多机器人融合建图程序,它致力于解决多机器人协同建图过程中的难题,大幅提升建图效率与精度。
一、程序核心功能
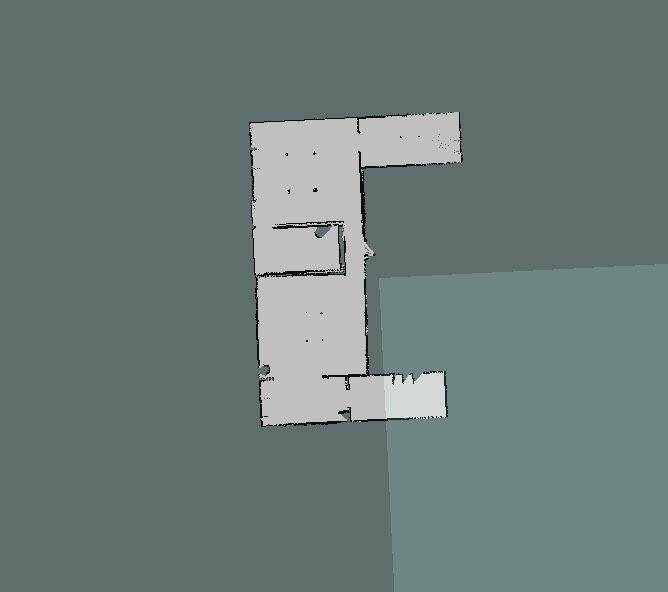
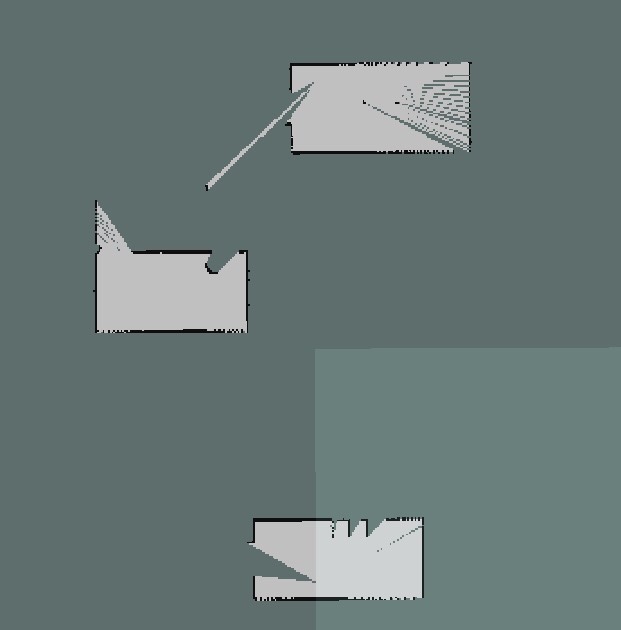
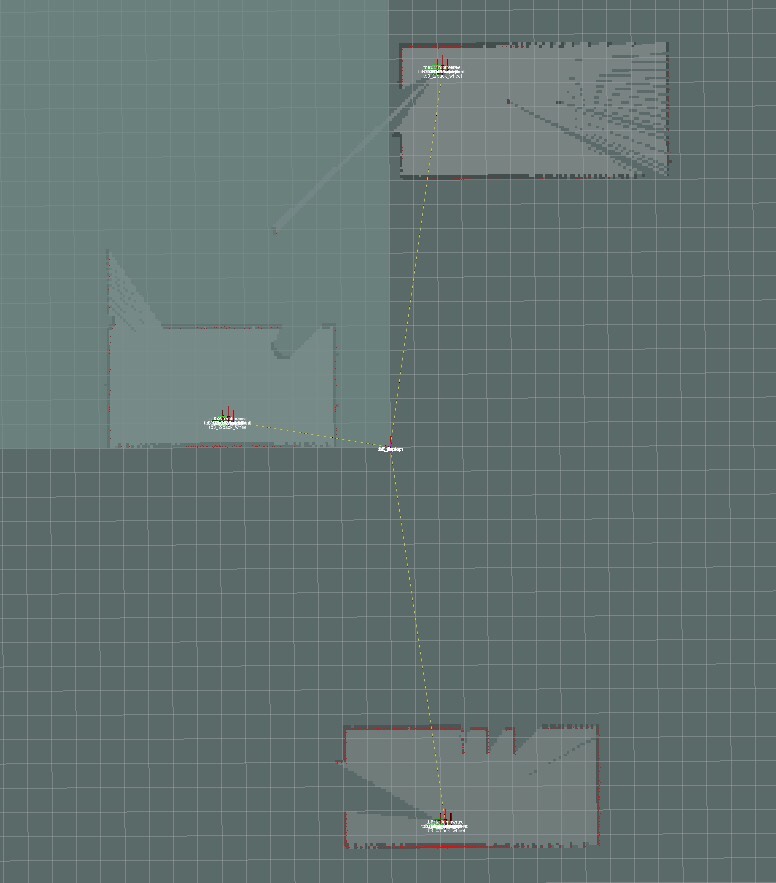
这个程序允许用户将多台机器人联合起来协同建图,同时还能对多个机器人的建图数据进行融合处理,最终生成一张完整的地图。想象一下,多台机器人同时在不同区域探索,最后它们的数据整合在一起,形成一个全面、精准的地图,这对于复杂环境的探索与测绘无疑是强大的助力。
二、架构优势:分布式系统架构
该程序采用分布式系统架构,这可太重要了。它就像一个高效的指挥中心,能够同时处理多个机器人的建图数据。这种架构赋予了程序良好的扩展性和可靠性。打个比方,如果未来需要增加更多的机器人参与建图,分布式架构可以轻松应对,而不用担心系统崩溃。
三、算法亮点
- SLAM自主建图技术:程序在算法层面使用了SLAM(Simultaneous Localization and Mapping)自主建图技术。这是个啥呢?简单说,就是让机器人在不知道自身初始位置的情况下,一边探索环境一边构建地图。下面这部分简单的代码片段展示了SLAM算法在ROS中的一个基础框架(这里只是示意,实际代码会复杂得多):
import rospy
from sensor_msgs.msg import LaserScan
from nav_msgs.msg import Odometry
def laser_callback(data):
# 处理激光雷达数据
ranges = data.ranges
# 这里可以添加对激光数据的处理逻辑,比如提取特征点等
def odom_callback(data):
# 处理里程计数据
pose = data.pose.pose
# 这里可以添加对位置信息的处理逻辑,用于定位
def main():
rospy.init_node('slam_node')
rospy.Subscriber('/scan', LaserScan, laser_callback)
rospy.Subscriber('/odom', Odometry, odom_callback)
rospy.spin()
if __name__ == '__main__':
main()在这段代码中,我们通过订阅激光雷达数据(/scan话题)和里程计数据(/odom话题),分别在lasercallback和odomcallback函数中处理数据,这些数据是SLAM算法进行定位和建图的基础。
- 基于坐标变换的地图对齐方法:为了让多机器人的地图能够准确融合,程序使用了基于坐标变换的地图对齐方法。这个方法能在复杂环境中准确地重建二维地图。在实际操作中,不同机器人建图的坐标系可能不同,通过坐标变换就能把这些地图统一到一个坐标系下,实现完美融合。
- 激光雷达导航壁障算法:程序还利用激光雷达,结合DWA(Dynamic Window Approach)和TEB(Timed Elastic Band)算法来实现导航壁障。DWA算法侧重于局部路径规划,通过在机器人当前速度附近的动态窗口内搜索最优速度,以避免碰撞。TEB算法则更关注路径的平滑性和动态环境下的实时调整。下面是一个简化的DWA算法在ROS中实现的伪代码示例:
# 假设已经获取到激光雷达数据和机器人当前速度
def dwa_planning(laser_data, current_velocity):
# 定义一些参数
max_vel = 1.0
min_vel = 0.1
max_omega = 1.57
min_omega = -1.57
dt = 0.1
# 动态窗口计算
v_min = max(min_vel, current_velocity[0] - max_acc * dt)
v_max = min(max_vel, current_velocity[0] + max_acc * dt)
w_min = max(min_omega, current_velocity[1] - max_angular_acc * dt)
w_max = min(max_omega, current_velocity[1] + max_angular_acc * dt)
# 在动态窗口内搜索最优速度
best_score = -1
best_vel = [0, 0]
for v in np.arange(v_min, v_max, 0.1):
for w in np.arange(w_min, w_max, 0.1):
# 这里可以添加计算速度得分的逻辑,比如考虑距离障碍物的距离、目标方向等
score = calculate_score(v, w, laser_data)
if score > best_score:
best_score = score
best_vel = [v, w]
return best_vel这段伪代码展示了DWA算法在ROS环境下的大致实现思路,通过动态窗口搜索最优速度,以确保机器人在避障的同时向目标前进。
四、使用限制
需要注意的是,该程序仅适用于Ubuntu18及Ubuntu16系统。据官方说明,20以上的系统在ROS仿真时存在Bug。这也提醒我们,在使用这个强大的多机器人融合建图程序时,要选择合适的系统环境,以免遇到不必要的麻烦。
总的来说,基于ROS系统的多机器人融合建图程序在多机器人协同建图方面提供了一个非常有价值的解决方案,其独特的架构和算法组合,为复杂环境下的建图任务带来了新的可能。希望未来随着技术的发展,这些局限能够被突破,让更多用户受益。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐

 30
30 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)