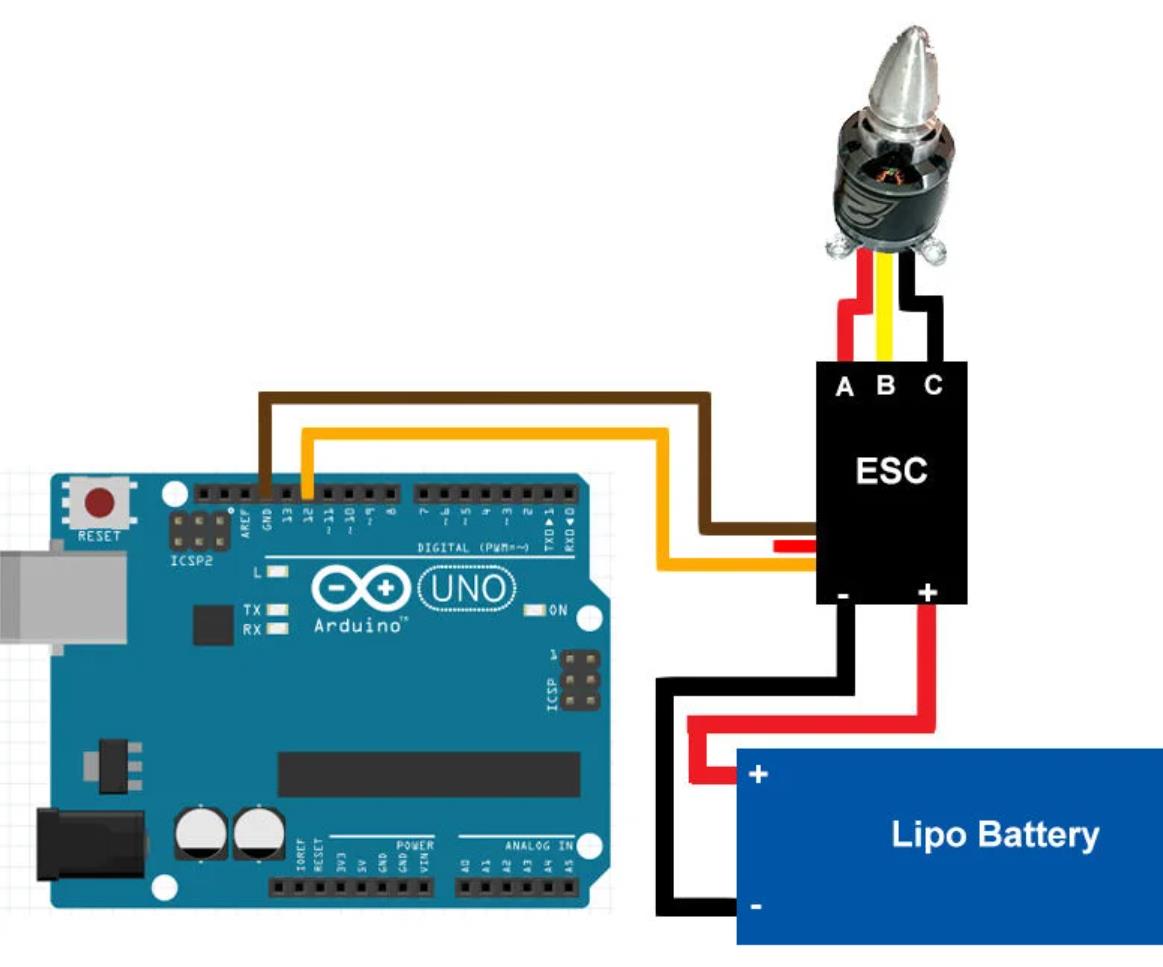
【花雕学编程】Arduino BLDC 之力矩控制模式(需电流检测)

在基于 Arduino 的无刷直流电机(BLDC)控制系统中,力矩控制模式(Torque Control Mode) 是一种以输出电磁转矩为直接控制目标的高级驱动策略。与常见的速度或位置控制不同,力矩控制要求系统能够实时感知电机相电流,并据此调节逆变器输出,使电机产生精确、可预测的转矩。该模式对硬件(尤其是电流检测电路)和控制算法均有较高要求,但在需要精准力交互的场景中具有不可替代的价值。
一、主要特点
. 以电流为控制核心,实现转矩线性化
BLDC 电机的电磁转矩 T e在理想换相条件下近似正比于相电流幅值(T e∝I)。因此,精确控制相电流即可直接控制输出力矩。力矩控制模式通过实时采样一相或母线电流,将其作为反馈量,构成电流闭环(通常为 PI 控制),从而实现对转矩的快速、线性调节。
. 依赖高精度、高带宽的电流检测
常用传感器:霍尔效应电流传感器(如 ACS712、ACS724)、分流电阻(Shunt Resistor)配合差分放大器;
采样需与 PWM 开关同步(通常在 PWM 有效期间中部采样,避开开关噪声);
Arduino 需具备足够 ADC 分辨率(10 位为最低要求,建议使用外部 12–16 位 ADC 如 ADS1115 提升精度)。
. 控制周期短,实时性要求高
电流环带宽通常需 >1 kHz,控制周期 ≤1 ms;
在 Arduino Uno/Nano 等 8 位平台上实现极具挑战,建议使用:
Arduino Due(SAM3X8E,84 MHz ARM Cortex-M3);
Teensy 4.0/4.1(600 MHz Cortex-M7);
或采用专用 BLDC 驱动芯片(如 STSPIN32F0)集成 MCU 与栅极驱动。
. 通常作为内层控制环,支撑上层任务
力矩控制本身不直接控制位置或速度,而是作为底层执行单元,服务于更高层控制目标:
在协作机器人中,力矩环实现柔顺控制(Compliance);
在电动工具中,实现恒扭矩输出(如电钻防过载);
在 FOC(磁场定向控制)架构中,力矩控制是 d-q 轴电流环的自然延伸。
. 对换相时序与 PWM 调制策略敏感
在方波驱动(六步换相)下,力矩脉动大,难以实现平滑力矩控制;
推荐采用 FOC(正弦波驱动),通过 Clark/Park 变换将三相电流解耦为直轴(Id)与交轴(Iq)分量,其中 I q直接对应转矩;
Arduino 需运行 FOC 算法(如开源库 SimpleFOC),并配合 SVPWM 调制。
二、典型应用场景(条文形式)
协作机器人(Cobot)关节驱动
在人机共融场景中,关节需感知外部接触力并主动柔顺响应。力矩控制使 BLDC 能模拟“弹簧-阻尼”特性,避免刚性碰撞,保障操作安全。
电动工具恒扭矩控制
如电钻、螺丝刀在拧紧过程中需维持设定扭矩,防止过紧损坏工件。通过电流闭环实时限制最大输出力矩,实现“打滑即停”。
触觉反馈或力反馈装置
在虚拟现实(VR)手柄、康复训练设备中,BLDC 根据虚拟环境阻力生成对应反作用力,力矩控制是实现高保真力反馈的核心。
张力控制系统
在卷绕、放线、薄膜收卷等工艺中,材料张力需恒定。通过力矩控制 BLDC 提供稳定拉力,不受线速度变化影响。
高级运动控制研究平台
高校或实验室利用 Arduino + BLDC 构建力控实验台,验证阻抗控制、导纳控制、力/位混合控制等先进算法。
三、需要注意的关键事项
. 电流检测电路设计至关重要
分流电阻方案:
选用低温漂、低感值电阻(如 5–20 mΩ);
配合高共模抑制比(CMRR >80 dB)差分放大器(如 INA240、AD8418);
注意功率耗散(P=I R),避免过热。
霍尔传感器方案:
ACS712 噪声较大、带宽有限(~80 kHz),仅适用于低动态场景;
推荐 ACS724(带滤波、更高精度)或 Allegro A136x 系列。
. ADC 采样必须与 PWM 同步
在六步换相中,仅在有效矢量期间采样(如高侧 MOSFET 导通时);
在 FOC 中,通常在每个 PWM 周期中心触发 ADC 转换;
Arduino 需通过定时器中断或 DMA(若支持)实现同步,避免采样抖动。
. 避免电流环饱和与积分 wind-up
设置合理的电流限幅(如 ±最大连续电流);
引入抗积分饱和(Anti-windup)机制,防止 PI 积分项在输出饱和时持续累积;
示例:
if (output > MAX_PWM) {
output = MAX_PWM;
integrator -= error; // 抑制积分增长
}
. 电源与母线电容设计需支撑动态电流
力矩突变导致电流阶跃,母线电压易跌落;
建议使用低 ESR 电解电容(≥1000 μF)并联陶瓷电容(0.1 μF);
电源需具备足够瞬时供电能力(如锂聚合物电池优于普通开关电源)。
. Arduino 平台性能限制需清醒认知
Uno/Nano 无法实时运行 FOC + 电流环(计算量过大);
推荐平台:
Arduino Due(支持 SimpleFOC,可实现基础力矩控制);
Teensy 4.1(浮点性能强,适合高带宽控制);
或采用集成 MCU 的智能驱动模块(如 ODrive、VESC)。
. 安全保护机制必须完备
实时监测过流、过热、欠压;
设置硬件过流保护(如比较器 + 栅极驱动禁用);
软件中加入电流异常快速停机逻辑(<1 ms 响应)。
1、基于分流电阻+运放的简易力矩控制
#define PWM_PIN 9 // 驱动BLDC的PWM输出引脚
#define CURRENT_SENSE_ANODE A0 // 电流检测通道(接运放输出端)
float targetCurrent = 2.5; // 目标电流值(安培)
float Kp = 0.8; // 比例系数
float currentScale = 3.3 / (1024 * 0.05); // ADC转电流系数(假设运放增益=20倍)
void setup() {
pinMode(PWM_PIN, OUTPUT);
analogReference(INTERNAL); // 使用内部基准源提高精度
}
void loop() {
float actualCurrent = readCurrent();
float error = targetCurrent - actualCurrent;
float dutyCycle = constrain(Kp * error, 0, 255);
analogWrite(PWM_PIN, dutyCycle);
delay(10); // 控制周期约10kHz
}
float readCurrent() {
int adcValue = analogRead(CURRENT_SENSE_ANODE);
return (adcValue * currentScale) / 20; // 除以运放增益得到实际电流
}
要点解读
低成本电流采样:通过分流电阻+运放构成差分放大器,将微小电压信号放大至可用范围。
实时闭环调节:采用比例控制快速响应负载变化,维持设定电流值。
标定必要性:currentScale系数需通过实验测量确定,直接影响控制精度。
带宽限制因素:ADC采样率和运放响应速度制约系统动态性能。
热管理隐患:大功率下分流电阻发热严重,需注意散热设计。
2、集成式电流传感器(INA219)精准控制
#include <Wire.h>
#include <Adafruit_INA219.h>
Adafruit_INA219 ina219;
#define MOTOR_DIR 7 // 方向控制引脚
#define PWM_OUT 10 // PWM输出引脚
float targetCurrent = 3.0; // 目标电流(A)
float Kp = 0.6;
float integral = 0;
float lastError = 0;
void setup() {
Wire.begin();
ina219.begin();
pinMode(MOTOR_DIR, OUTPUT);
pinMode(PWM_OUT, OUTPUT);
digitalWrite(MOTOR_DIR, HIGH); // 设置初始方向
}
void loop() {
float busVoltage = ina219.getBusVoltage_V();
float shuntVoltage = ina219.getShuntVoltage_mV();
float currentMa = ina219.getCurrent_mA();
float actualCurrent = currentMa / 1000.0;
// PI控制器实现
float error = targetCurrent - actualCurrent;
integral += error * 0.01;
float derivative = (error - lastError) / 0.01;
float pwmValue = Kp * error + Ki * integral + Kd * derivative;
pwmValue = constrain(pwmValue, 0, 255);
analogWrite(PWM_OUT, pwmValue);
lastError = error;
delay(10);
}
要点解读
高精度传感方案:INA219提供电压/电流双参数监测,误差小于1%。
增强型PI控制:引入积分项消除稳态误差,微分项抑制超调振荡。
总线电压补偿:自动修正电源电压波动对电流计算的影响。
多级保护机制:可设置过流/欠压阈值触发紧急停机。
I²C资源占用:同一总线上最多挂载4片INA219,适合多电机场景。
3、无刷伺服驱动器联合调试(FOC算法)
#include <SimpleFOC.h>
BLDCMotor motor = BLDCMotor(11); // 极对数=11
BLDCDriver3PWM driver(9, 10, 11); // PWM引脚分配
CurrentSense cs = CurrentSense(A0, A1, A2); // 三相电流检测
void setup() {
driver.init();
motor.linkDriver(&driver);
cs.linkDriver(&driver);
motor.sensors->offset = 0.01f; // 校准零漂
motor.controller = motion_control; // FOC控制模式
motor.init();
}
void loop() {
motor.loopFOC(); // 执行磁场定向控制
// 力矩控制模式切换
static bool torqueMode = true;
if (torqueMode) {
float measuredTorque = cs.getTorque();
float error = targetTorque - measuredTorque;
motor.voltage.q = kp * error; // q轴电压指令
} else {
motor.move(targetAngle); // 位置控制模式
}
}
要点解读
专业级FOC架构:完整实现SVPWM调制和Clark/Park变换,支持全数字锁相环。
矢量力矩控制:直接操控q轴电流分量实现精确转矩输出,效率提升显著。
自适应参数识别:运行时自动更新电机电感/电阻参数,适应温漂影响。
多重保护功能:内置过流/过温/堵转保护,故障恢复后自动重同步。
开发门槛较高:需深入理解电机数学模型,推荐配合示波器进行参数整定。
4、基于电流反馈的恒定力矩控制
#include <Arduino.h>
#define PWM_PIN 9 // PWM输出引脚
#define CURRENT_PIN A0 // 电流检测引脚(通过采样电阻+运放)
#define TARGET_CURRENT 1.5 // 目标电流(安培)
float kp = 0.5; // 比例控制系数
void setup() {
pinMode(PWM_PIN, OUTPUT);
Serial.begin(9600);
}
void loop() {
// 读取电流(假设运放输出0-5V对应0-5A)
float current = analogRead(CURRENT_PIN) * (5.0 / 1023.0);
// 计算误差并调整PWM
float error = TARGET_CURRENT - current;
int pwm = constrain(error * kp * 50, 0, 255); // 限制PWM范围
analogWrite(PWM_PIN, pwm);
Serial.print("Target: "); Serial.print(TARGET_CURRENT);
Serial.print("A, Actual: "); Serial.print(current);
Serial.print("A, PWM: "); Serial.println(pwm);
delay(50);
}
5、力矩限幅与动态调整
#include <Arduino.h>
#define PWM_PIN 9
#define CURRENT_PIN A0
#define MAX_CURRENT 2.0 // 最大允许电流(过流保护)
float targetTorque = 0.0; // 动态目标力矩(通过串口输入)
void setup() {
pinMode(PWM_PIN, OUTPUT);
Serial.begin(9600);
Serial.println("Enter target torque (0-2.0A):");
}
void loop() {
// 通过串口更新目标力矩
if (Serial.available()) {
targetTorque = Serial.parseFloat();
targetTorque = constrain(targetTorque, 0, MAX_CURRENT);
}
// 读取实际电流
float current = analogRead(CURRENT_PIN) * (5.0 / 1023.0);
// 过流保护:若实际电流超过最大值,强制降低PWM
int pwm;
if (current > MAX_CURRENT) {
pwm = 0; // 立即切断功率
Serial.println("OVERCURRENT! PWM DISABLED");
} else {
// 常规PI控制(简化版)
static float integral = 0;
float error = targetTorque - current;
integral += error;
pwm = constrain(error * 0.8 + integral * 0.1, 0, 255);
}
analogWrite(PWM_PIN, pwm);
delay(30);
}
6、基于电流的力矩闭环+方向控制
#include <Arduino.h>
#define PWM_PIN 9
#define DIR_PIN 8 // 方向控制引脚
#define CURRENT_PIN A0
#define TARGET_CURRENT 1.0 // 目标电流(正值为正转,负值为反转)
void setup() {
pinMode(PWM_PIN, OUTPUT);
pinMode(DIR_PIN, OUTPUT);
Serial.begin(9600);
}
void loop() {
// 解析目标电流方向(通过符号)
float target = TARGET_CURRENT;
bool reverse = (target < 0);
if (reverse) target = -target;
// 设置方向
digitalWrite(DIR_PIN, reverse ? HIGH : LOW);
// 读取实际电流(绝对值)
float current = analogRead(CURRENT_PIN) * (5.0 / 1023.0);
// PI控制(仅比例项简化)
float error = target - current;
int pwm = constrain(error * 0.7 * (reverse ? -1 : 1), -255, 255);
// 处理负PWM(反转)
if (pwm < 0) {
digitalWrite(DIR_PIN, HIGH);
pwm = -pwm;
} else {
digitalWrite(DIR_PIN, LOW);
}
analogWrite(PWM_PIN, pwm);
Serial.print("Target: "); Serial.print(reverse ? "-" : ""); Serial.print(target);
Serial.print("A, Actual: "); Serial.print(current); Serial.print("A, PWM: "); Serial.println(pwm);
delay(50);
}
要点解读
电流检测电路设计
采样电阻:通常使用低阻值(如0.01Ω)高功率电阻串联在电机回路中,通过测量电阻两端电压计算电流(I=V/R)。
信号放大:由于BLDC电流可能较大(如10A),需用运放(如INA169)将电压放大到Arduino可测范围(0-5V)。
滤波:在运放输出端添加RC低通滤波,抑制PWM高频噪声。
力矩与电流的线性关系
BLDC电机的力矩与相电流成正比(忽略磁饱和时),因此直接控制电流即可控制力矩。
校准:需通过实验确定电流检测电路的增益(如1A对应多少ADC读数),代码中需乘以校准系数(如案例4的5.0/1023.0)。
控制算法选择
开环PWM:案例4仅用比例控制(P),适合简单场景,但易振荡。
PI控制:案例5引入积分项(I)消除稳态误差,但需注意积分抗饱和(如限制积分累加)。
高级控制:实际应用中可结合FOC(磁场定向控制)实现更精确的力矩控制。
过流保护与硬件冗余
软件限流:如案例5检测到电流超过MAX_CURRENT时立即关闭PWM。
硬件保护:建议使用带过流保护的驱动芯片(如DRV8323),或通过比较器触发快速关断。
方向控制与死区时间
H桥驱动:案例6通过DIR_PIN控制电机方向,需确保方向切换时PWM为0,避免直通(需软件或硬件死区)。
符号处理:负目标电流需转换为反向PWM,同时保持电流检测值为正(取绝对值)。
注意,以上案例只是为了拓展思路,仅供参考。它们可能有错误、不适用或者无法编译。您的硬件平台、使用场景和Arduino版本可能影响使用方法的选择。实际编程时,您要根据自己的硬件配置、使用场景和具体需求进行调整,并多次实际测试。您还要正确连接硬件,了解所用传感器和设备的规范和特性。涉及硬件操作的代码,您要在使用前确认引脚和电平等参数的正确性和安全性。


DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐


 21
21 0
0- 0



 已为社区贡献148条内容
已为社区贡献148条内容

所有评论(0)