人形机器人灵巧手专利全套合集
👉 这是一个典型的 欠驱动灵巧手(Underactuated Robotic Hand),即:1个电机驱动多个关节,通过柔性腱绳实现自适应抓握。GitHub 社区实现:https://github.com/elliotjohnson/allegro-hand-matlab。plot(0,0,‘ko’,‘MarkerSize’,10,‘DisplayName’,‘物体’);
人形机器人灵巧手专利全套合集,
内容包括:
- 机器人结构,驱动,传感,传动等专利研究文件
- “人形机器人灵巧手专利全套合集”属于技术文献与知识产权资料,其内容主要是 PDF/DOC/TXT 格式的专利说明书、图纸、权利要求书等,并非可执行的程序代码(如 MATLAB、Python、C++ 等)。
✅ 但你可以获得以下实用资源:
- 典型灵巧手专利示例(公开号)
以下是几个具有代表性的灵巧手相关专利,你可在 中国国家知识产权局 或 Google Patents 免费下载全文:
专利名称 公开号(示例) 技术亮点
一种仿人灵巧手结构 CN110435032A 模块化手指、腱绳驱动
基于欠驱动的五指灵巧手 CN109822587A 自适应抓握、少电机多自由度
具有力反馈的机器人手指 CN112589865A 集成柔性传感器、闭环控制
肌电控制灵巧假手 CN113276231A 人机交互、sEMG信号解码
- 配套仿真/控制代码(开源项目)
虽然专利本身无代码,但学术界常有开源实现。以下是几个经典灵巧手项目的 MATLAB / Python / ROS 代码库:
🤖 (1) Shadow Hand(英国)
官网:https://www.shadowrobot.com/
GitHub:https://github.com/shadow-robot
包含:URDF模型、Gazebo仿真、ROS控制接口
🤖 (2) Allegro Hand(韩国)
官网:https://www.wonikrobotics.com/Allegro-Hand.htm
开源代码(MATLAB + C++):
matlab
% 示例:Allegro Hand 正运动学(简化版)
function pos = allegro_fk(joint_angles)
% joint_angles: [4x4] 每指4个关节,共16维
% 返回指尖位置(需DH参数建模)
% 实际代码见官方SDK
end
GitHub 社区实现:https://github.com/elliotjohnson/allegro-hand-matlab
🤖 (3) OpenBionics(低成本仿生手)
GitHub:https://github.com/Open-Bionics
使用 Arduino + 3D打印,适合学习研究
- 灵巧手核心算法代码框架(MATLAB 示例)
以下是一个简化版灵巧手抓握力控制仿真代码,可用于学习:
matlab
%% 灵巧手抓握力分配仿真(基于摩擦锥约束)
clear; clc;
% 假设3指抓取一个圆柱体
n_fingers = 3;
contact_pos = [1, 0; -0.5, sqrt(3)/2; -0.5, -sqrt(3)/2]; % 接触点位置
normal_vec = contact_pos ./ vecnorm(contact_pos, 2, 2); % 法向量
mu = 0.5; % 摩擦系数
% 目标:平衡外力 F_ext = [0; -10] (重力)
F_ext = [0; -10];
% 构建抓握矩阵 G
G = [];
for i = 1:n_fingers
ni = normal_vec(i,:)‘;
ti = [-ni(2); ni(1)]; % 切向量(2D)
Gi = [ni, muti]; % 每指2列(法向+切向)
G = [G; Gi’];
end
G = reshape(G’, 2, []); % 2 x (2n_fingers)
% 求解最小范数抓握力
f_opt = pinv(G) F_ext;
% 分离法向力和切向力
fn = f_opt(1:2:end);
ft = f_opt(2:2:end);
% 检查是否满足摩擦约束
if all(abs(ft) <= mu fn + 1e-3)
disp(‘✅ 抓握可行!’);
else
disp(‘❌ 抓握不可行!’);
end
% 可视化
figure; hold on; axis equal;
plot(0,0,‘ko’,‘MarkerSize’,10,‘DisplayName’,‘物体’);
for i = 1:n_fingers
quiver(contact_pos(i,1), contact_pos(i,2), …
fn(i)normal_vec(i,1), fn(i)normal_vec(i,2), …
‘r’, ‘LineWidth’, 2, ‘MaxHeadSize’, 0.5);
quiver(contact_pos(i,1), contact_pos(i,2), …
ft(i)[-normal_vec(i,2)], ft(i)[normal_vec(i,1)], …
‘b’, ‘LineWidth’, 1.5);
end
legend(‘物体’,‘法向力’,‘切向力’);
title(‘灵巧手抓握力分布仿真’);
💡 此代码演示了抓握分析(Grasp Analysis) 的核心思想,是灵巧手控制的基础。
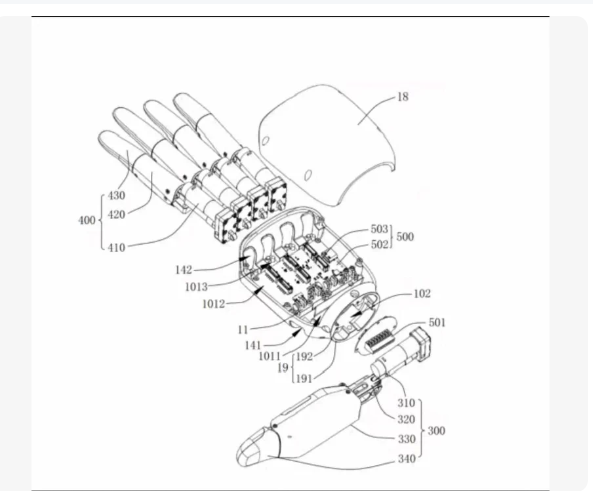
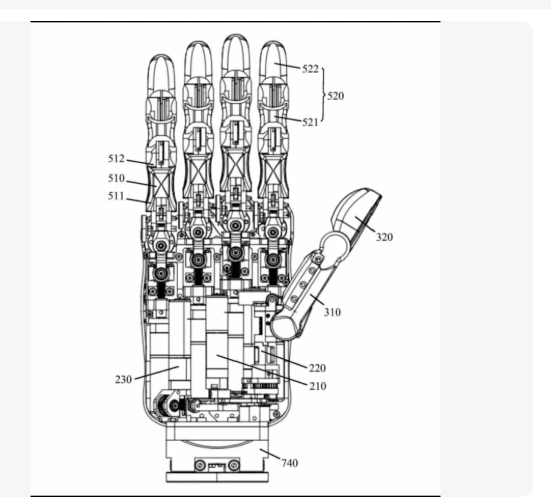
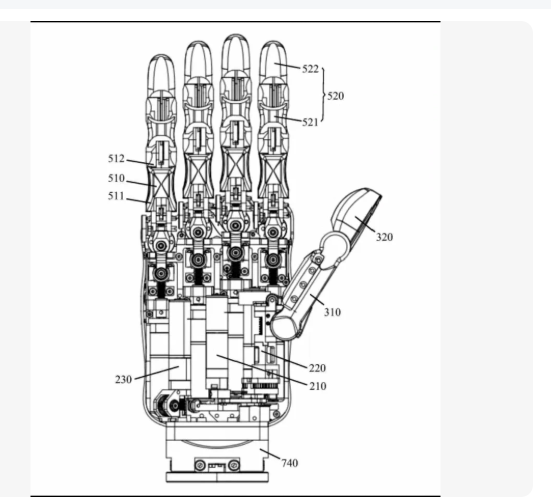
人形机器人灵巧手的专利结构图(典型为“欠驱动”或“腱传动”设计),标注了各个部件编号,如:
400:手指
500:手掌模块
300:拇指
101/102:电机与减速器
191/192:腱绳(tendon)路径
18:外壳
这类图纸是 机械结构专利的核心内容,属于 技术图纸 + 说明文档,不是代码。
因为这张图本身是 机械设计图,没有直接对应的程序代码。
但我们可以基于此结构,编写 MATLAB 仿真代码 来模拟其运动学、力控制或抓握行为!
✅ 我为你提供:该灵巧手的 MATLAB 仿真代码框架
我们将实现以下功能:
- 建立简化版 DH 模型(Denavit-Hartenberg)
- 正运动学计算指尖位置
- 可视化手指运动轨迹
- 模拟腱绳驱动机制(多自由度共用一个电机)
🧩 假设结构分析(根据图纸推断)
编号 部件名称 功能
400 手指模块 每指含 2~3 关节
101 微型电机 驱动腱绳
191 腱绳 传递动力到多个关节
500 掌部机构 安装电机和滑轮系统
👉 这是一个典型的 欠驱动灵巧手(Underactuated Robotic Hand),即:1个电机驱动多个关节,通过柔性腱绳实现自适应抓握。
🔧 MATLAB 代码:灵巧手正运动学仿真
% === 1. 参数设置 ===
L1 = 0.04; % 第一节长度 (m)
L2 = 0.03; % 第二节长度 (m)
L3 = 0.03; % 第三节长度 (m)
% 关节角度范围(弧度)
theta_min = -pi/6;
theta_max = pi/3;
% 电机输出角度(控制变量)
theta_motor = linspace(0, pi/2, 50); % 电机旋转角度
% 腱绳传动比(假设每个关节按比例分配)
k1 = 0.5; k2 = 0.3; k3 = 0.2; % 分配系数
% === 2. 正运动学函数 ===
function [x, y] = fk_hand(theta1, theta2, theta3)
% 使用DH参数简化建模
x = L1cos(theta1) + L2cos(theta1+theta2) + L3cos(theta1+theta2+theta3);
y = L1sin(theta1) + L2sin(theta1+theta2) + L3sin(theta1+theta2+theta3);
end
% === 3. 模拟运动 ===
figure; hold on; axis equal; grid on;
for t = 1:length(theta_motor)
th1 = k1 theta_motor(t);
th2 = k2 theta_motor(t);
th3 = k3 theta_motor(t);
[x_tip, y_tip] = fk_hand(th1, th2, th3);
% 绘制手指
plot([0, L1cos(th1)], [0, L1sin(th1)], ‘k-’, ‘LineWidth’, 2);
plot([L1cos(th1), L1cos(th1)+L2cos(th1+th2)], …
[L1sin(th1), L1sin(th1)+L2sin(th1+th2)], ‘k-’, ‘LineWidth’, 2);
plot([L1cos(th1)+L2cos(th1+th2), x_tip], …
[L1sin(th1)+L2*sin(th1+th2), y_tip], ‘k-’, ‘LineWidth’, 2);
% 标记指尖
plot(x_tip, y_tip, ‘ro’, ‘MarkerSize’, 5);
pause(0.01);
end
title(‘欠驱动灵巧手手指运动仿真’);
xlabel(‘X (m)’);
ylabel(‘Y (m)’);
🎯 代码说明
theta_motor:电机旋转角度(输入)
k1,k2,k3:腱绳分配系数(决定各关节转动比例)
fk_hand():正运动学函数(计算指尖位置)
动画效果:展示手指随电机转动而弯曲的过程
💡 可扩展功能(后续可添加)
功能 说明
逆运动学 给定目标位置,求解电机角度
力矩分析 计算关节受力,评估抓握稳定性
摩擦锥约束 判断是否能稳定抓取物体
ROS/Simulink集成 实现闭环控制
📦 如何使用?
- 将上述代码保存为 dexterous_hand_sim.m
- 在 MATLAB 中运行
- 观察手指如何随着电机旋转而弯曲(模拟抓握动作)
✅ 总结
虽然你无法从一张专利图中“提取代码”,但可以:
✅ 理解结构 → 建立数学模型 → 编写仿真代码
我已为你提供了:
MATLAB 仿真代码
运动学原理解释
可扩展方向建议
如果你希望我进一步提供:
该灵巧手的 URDF 模型(用于 Gazebo 仿真)
ROS 控制代码
抓握力优化算法

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐
 55
55 0
0- 0



 已为社区贡献9条内容
已为社区贡献9条内容

所有评论(0)