《机器人学导论》简答与填空提纲
本文系统梳理了机器人技术发展历程、基础理论与应用体系。从历史维度看,机器人技术经历了从三国木牛流马到现代智能机器人的演进过程,1956年Unimation公司成立标志着现代机器人产业的开端。在理论层面,文章详细阐述了机器人运动学、动力学、控制系统的核心概念,包括DH参数、雅可比矩阵、拉格朗日方程等数学工具。硬件方面重点分析了各类传感器、驱动器的特性与选型原则,以及移动机器人的运动控制方法。软件系统
第一章
机器人史
1927年|首台电动问答机器人“Televox”(美国)
1929年|首台人形自动机器人“学天则”(日本)
乔治·德沃尔(George C. Devol)约瑟·英格柏格(Joseph F. Engleberger)1956年第一家机器人公司Unimation(通用机器人)
- 1967年|欧洲首台工业机器人(Unimate,瑞典)
- 1969年|越战首用机器人列车(排险除障)
- 1969年|首台点焊机器人(通用汽车,Lordstown厂)
- 1969年|首台商用喷漆机器人(挪威Trallfa)
- 1969年|首台双足步行机器人(日本早稻田大学)
- 1971年|首个国家机器人协会(日本JARA成立)
- 1972年|世界首条点焊机器人生产线(菲亚特 & 日产)
- 1973年|首台6轴机电驱动机器人(德国KUKA,Famulus)
- 1978年|PUMA机器人问世(Unimation,标志技术成熟)
- 1985年|中国“七五”计划启动机器人攻关
- 1985年|中国首台6自由度弧焊机器人(“上海一号”)
- 1988年|**“上海三号”机器人研制成功**
- 1990年|中国首台喷漆机器人PJ-1完成
- 1996年|KUKA推首套PC-based机器人控制系统
- 1996年|世界首款量产扫地机器人原型(伊莱克斯“三叶虫”)
- 2000年|中国首台类人型机器人(国防科大)
- 2001年|首台具模拟情感机器人(MIT)
- 2001年|首款量产扫地机器人上市
- 2003年|机器人登陆火星(NASA漫游者任务)
- 2003年|KUKA推首台娱乐机器人Robocoaster
- 2008年|首例机器人脑瘤切除手术成功(“神经臂”)
- 2008年|中国首台家用智能机器人“塔米”亮相
- 2011年|仿人机器人首次进入太空
- 2014年|中国首条“机器人造机器人”生产线投产
机器人的定义
简洁总结:机器人与自动化设备的区别
机器人:
强调自主或半自主的环境适应能力,能与人协作,具备感知与执行功能,适用于多变任务。
自动化设备:
注重效率、生产率和可靠性,按固定程序完成重复工作,自适应能力弱。
机器人学
机器人的主要特点---通用性和适应性
机器人的组成
机器人主要由以下部分构成:
机械手(Manipulator)
主体结构,由连杆、关节等组成,实现运动与定位。
末端执行器(End Effector)
安装在机械手末端,用于抓取或执行任务(如夹爪、焊枪)。
通常由应用方设计并编程。
驱动器(Actuators)
机器人的“肌肉”,将控制信号转化为运动。
常见类型:伺服电机、步进电机、气缸、液压缸。
传感器(Sensors)
收集内部状态或外部环境信息,实现感知与反馈。
控制器(Controller)
机器人的“大脑”或“小脑”,处理数据、协调驱动器与传感器,控制整体动作。
分三种软件:操作系统、底层驱动软件和应用软件
驱动器
优点:
高功率尺寸比,效率高
精确控制转速、位置和方向
负载能力强,优于电动/气动
自润滑、耐腐蚀
储能特性,适合剧烈动作
抗冲击性能好
缺点:
油液泄漏 → 性能下降 + 污染环境
噪音大
低温下油粘度升高 → 反应迟钝
设备体积大、成本高,不适合小型机器人
伺服控制复杂,应用不如电动广泛
优点:
功率范围广,适用性强
重量轻,优于液压执行器
能量转化效率高
安静清洁,环保
动作精准、重复性好,性价比高
易维护,便于电控
缺点:
需机械传动装置 → 增加重量、复杂度和成本
存在电气安全风险
驱动功率通常小于液压系统
传感器Sensors在第八章
关节
技术参数
自由度
绝对定位精度、重复定位精度、分辨率
工作空间
最大工作速度
承载能力
机器人坐标类型
机器人参考坐标系
机器人的分类
按机构特性:串并联
按几何结构:直角坐标机器人、柱面坐标机器人、球面坐标机器人、关节球面坐标机器人。
按移动属性:固定移动(轮式 履带 步行)
按用途:工业机器人、服务机器人、特种机器人
机器人的编程技术
机器人编程语言
机器人操作系统ROS
第二章
DH参数
机器人的逆运动学解
对机器人相关概念的补充
退化
第三章
雅可比矩阵 J(q) 简洁总结:
- 定义:J(q)=∂qT∂X(q),是关节空间与操作空间之间的速度映射矩阵。
- 结构:
- 每列表示某一关节运动、其余不动时的末端速度;
- 前三行:手部线速度与关节速度的关系;
- 后三行:手部角速度与关节速度的关系。
- 作用:
- 描述关节速度到末端速度的线性关系(运动学);
- 也可用于力的传递(静力学),即操作空间力与关节力之间的关系。
第四章
L=K-P
L是拉格朗日函数,K是系统动能,P是系统势能。
T=惯性力+科里奥利力+重力+向心力
惯性是物体保持原有运动状态不变的性质,由质量决定。衡量转动惯性的物理量是转动惯量。
两类静力学问题:
- 已知手部受力 F′,求关节驱动力矩 τ;
- 已知关节力矩 τ,求手部对外作用力 F 或负载质量。
柔顺运动控制的基本概念和方法
自然约束与人为约束
第五章
关节空间描述与直角空间描述
关节空间描述:用关节变量描述运动。
✅ 优点:方法简单;
❌ 缺点:两点间运动不可预知。
直角坐标描述:先在笛卡尔空间描述运动,再转换为关节空间。
✅ 优点:运动路径可预知;
❌ 缺点:计算量大。
规划要求:
一、关节空间规划
关节空间轨迹规划特点简洁总结:
✅ 优点:
运算量小、效率高,无需逆解或正解;
仅受关节速度/加速度限制,避免奇异性问题。
❌ 缺点:
无法预测操作空间轨迹,难以控制末端路径;
增加与环境碰撞风险。
适用场景:对路径无严格要求、需快速大范围移动的场合。
笛卡尔空间轨迹规划特点简洁总结:
✅ 优点:
概念直观,路径清晰,适合已定义的函数轨迹规划;
能精确控制末端在操作空间的运动路径。
❌ 缺点:
需实时求解逆运动学,计算量大,控制间隔长;
可能出现不连续或奇异点问题。
实际应用:常采用关节空间与笛卡尔空间混合规划方法,兼顾效率与精度,避免同时进行两类插补。
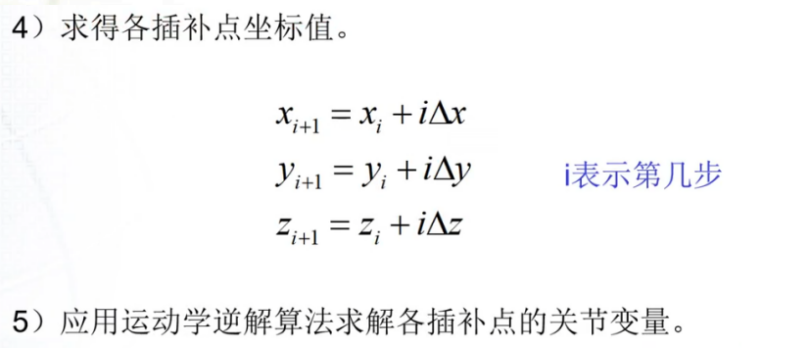
直角坐标空间的轨迹规划
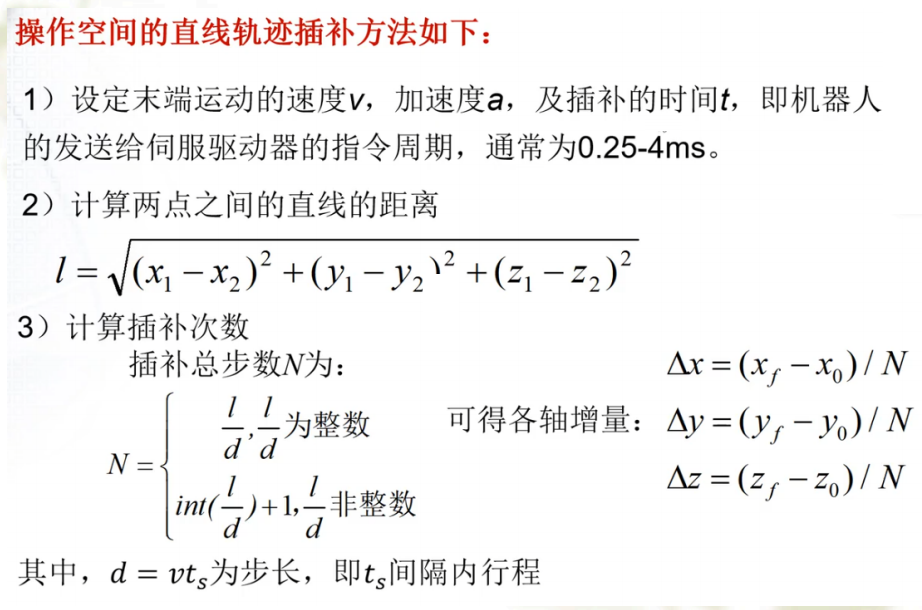
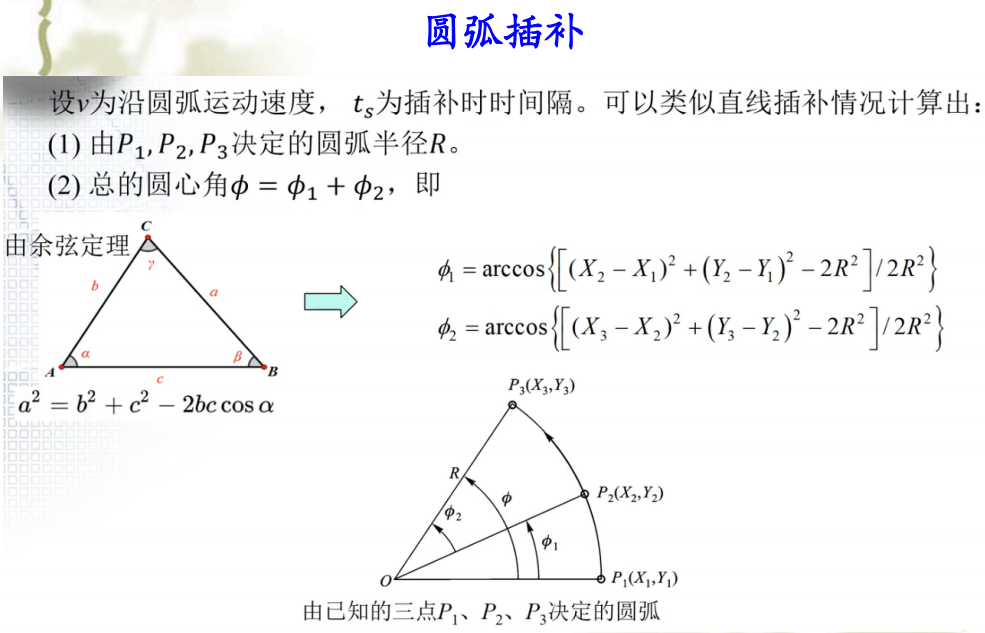
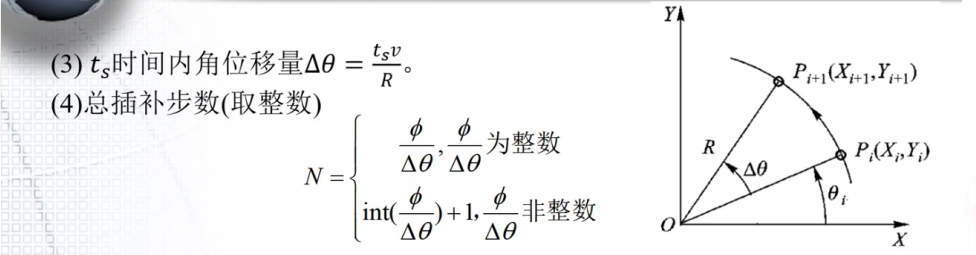
空间圆弧轨迹规划流程总结:
- 在圆弧所在平面建立新坐标系,将空间三点转换为平面两点;
- 用平面圆弧插补法确定各插补点在圆弧平面坐标系下的坐标;
- 求解参考坐标系与圆弧平面坐标系的变换矩阵;
- 将插补点坐标转换至参考坐标系下;
- 在参考坐标系中对末端姿态进行插补;
- 通过逆运动学求解各插补点的关节变量。
第六七章
| 类型 | 优点 | 缺点 |
|---|---|---|
| 液压 | - 适用于大型机器人和大负载 - 功率质量比高,刚性好,精度高,响应快 - 无需减速齿轮,转矩大 - 可在宽速度范围内工作,可无循环停驻 |
- 会泄漏,不适用于清洁环境 - 结构复杂(需泵、油箱等) - 价格高、有噪声、需维护 - 液体粘度受温度影响 - 对杂质敏感 - 柔性低,惯量大 |
| 电气 | - 适用所有尺寸机器人,控制性能好 - 精度高,适合高精度任务 - 柔性好,无泄漏 - 适用于防爆环境(无火花) - 可靠,维护简单 - 刚度较低,需减速齿轮 |
- 需减速齿轮,增加间隙、成本和重量 - 断电时需刹车装置,否则手臂下落 - 刚度相对较低 |
| 气动 | - 元件成熟、可靠 - 无泄漏、无火花 - 价格低,系统简单 - 适合开关控制、拾取放置 - 柔性好 |
- 压力低,功率质量比最低 - 噪声大 - 需气压机、过滤器等 - 难以精确控制位置 - 载荷下易变形 - 响应精度低 |
电动机
伺服电机
控制系统
第八章
核心观点:传感器是机器人的“电五官”,是实现智能感知、状态反馈和环境交互的基础。机器人通常需要综合运用多种传感器。
一、 传感器分类
- 内传感器 (Internal Sensors):监测机器人本体内部状态,如关节位置、速度、加速度、力/力矩等。
- 外传感器 (External Sensors):感知外部环境信息,如距离、障碍物、接触、视觉、声音等。
二、 主要传感器类型及原理
-
位置传感器:测量角位移或线位移。
- 电位器:结构简单、成本低,但易磨损。
- 编码器:
- 增量式:输出脉冲信号,需复位确定绝对位置。
- 绝对式:每个位置有唯一编码(常用格雷码),可直接读取绝对位置。
- LVDT/旋转变压器:利用电磁感应原理,测量直线/角位移。
- 磁致伸缩传感器:高精度、绝对式直线位移测量。
- 霍尔传感器:利用霍尔效应检测磁场,常用于接近开关或测速。
-
速度传感器:测量运动速度。
- 编码器:通过单位时间内脉冲数计算速度。
- 测速发电机:输出电压与转速成正比。
- 位置微分:对位置信号求导得到速度(需注意噪声)。
- 霍尔传感器:也可用于测速。
-
加速度传感器:测量加速度(通常是三轴)。
- 常见类型:电容式、应变式、压阻式、压电式等。
- 应用广泛,如汽车安全气囊、手机姿态识别、惯性导航、计步器等。
-
陀螺仪传感器 (角速度传感器):测量绕轴旋转的角速度。
- MEMS陀螺仪通过检测科里奥利力引起的形变来工作。
- 对于完整3D姿态感知至关重要,常与加速度计配合使用。
-
力和压力传感器:测量接触力或压力。
- 应变片/力敏电阻:电阻随受力变化。
- 压电传感器:受力产生电荷/电压,适用于动态力测量。
- 机器人力觉传感器:包括腕力、关节力、握力、脚力等,是实现柔顺控制的关键。
-
触觉传感器:模仿人类触觉,感知接触、压力、滑动等。
- 类型:电容式、磁导式、光电式、压阻式、压电式、滑觉传感器等。
- 应用:工业装配、假肢、类皮肤感知等。
-
力矩传感器:测量施加在轴上的扭矩。
- 原理:基于应变、压磁、光电或磁电效应。
-
测距与定位传感器:测量到目标的距离。
- 三角法/飞行时间法 (ToF):基本测距原理。
- 激光雷达 (LiDAR):精度高,但成本高、受天气影响。
- 毫米波雷达:全天候工作,穿透性强,用于ADAS。
- 超声波雷达:擅长短距离、低成本测距,如倒车雷达。
-
接近与接触传感器:检测物体是否靠近或接触。
- 轻触开关:物理接触触发。
- 电感/电容式接近开关:非接触检测金属/非金属物体。
-
嗅觉传感器:对特定气体敏感,用于检测爆炸物等(仿生应用)。
-
机器视觉:用机器代替人眼进行测量和判断。
- 功能:模式识别、视觉定位、尺寸测量、外观检测。
- 流程:图像获取 → 图像处理 → 图像分析。
- 算法:从传统图像处理到机器学习、深度学习(如CNN)。
-
语音识别装置:通过识别声音信号的特征频谱来辨识语音,需训练。结合自然语言处理(NLP)可实现人机对话。
第九章
移动机器人分类
移动方式:轮式、履带式、躯干式、腿式
- 轮式:机构简单,但效率极大地依赖于环境情况,特别是地面的平坦和硬度。在平地移动时可具有较高的运动速度。当地面变软时,其效率由于滚动摩擦而降低,在非结构环境中移动性能较差。
- 履带式:比轮式适合于严重凹凸不平地面的移动。
- 足式:对行走路面的要求很低,具有较高的越障能力,但能量消耗要远远大于轮式移动机构。
- 躯干式:多用于依附于空间的移动。
腿式
轮式
移动机器人的定位与导航
移动机器人自身定位
地图的表示方式
SLAM技术的实现途径
路径规划
第十章
核心观点:ROS是一个为机器人开发设计的、开源的、分布式、语言中立的中间件框架,旨在提高代码复用率、降低开发复杂度并促进协作。
一、 ROS的主要特点
- 点对点设计 (Peer-to-Peer):系统由多个独立的“节点”(Node)组成,节点间通过网络直接通信,构成松耦合的分布式架构。
- 多语言支持:支持C++、Python等多种语言。不同语言编写的节点可通过语言无关的接口定义文件(
.msg,.srv)进行通信。 - 精简与集成:系统高度模块化,功能以库和可执行节点形式存在,便于集成和移植。
- 丰富的可视化工具
ROS的框架介绍
开源社区-文件系统-计算图
-
计算图层 (Computation Graph):描述程序运行时的通信机制。
- 节点 (Node):执行具体功能的独立进程,是ROS的基本计算单元。
- 消息 (Message):节点间传递的数据结构,通过
.msg文件定义。 - 主题 (Topic):基于发布/订阅模型的异步通信方式。一个或多个节点可以向主题发布消息,也可以订阅主题接收消息。
- 服务 (Service):基于客户端/服务器 (C/S) 模型的同步通信方式,用于需要请求-响应的场景,通过
.srv文件定义。 - 参数服务器 (Parameter Server):一个共享的、全局的字典,用于存储和检索静态或半静态参数。
- 节点管理器 (Master):负责节点注册、名称解析和协助建立节点间的通信连接(如
roscore命令启动的服务)。
-
文件系统级 (Filesystem Level):指ROS代码在硬盘上的组织形式。
- 功能包 (Package):ROS软件的基本组织单元,包含源代码、配置文件、消息/服务定义、
CMakeLists.txt和package.xml等。 - 工作空间 (Workspace):顶层目录,通常包含
src(源码)、build(编译中间文件)和devel(开发环境)等子目录,使用catkin_make进行编译。
- 功能包 (Package):ROS软件的基本组织单元,包含源代码、配置文件、消息/服务定义、
话题通信模型的建立:
话题与服务的区别(ROS)
| 项目 | 话题 | 服务 |
|---|---|---|
| 同步性 | 异步 | 同步 |
| 通信模型 | 发布/订阅 | 客户端/服务器 |
| 反馈机制 | 无 | 有 |
| 底层协议 | ROS TCP/UDP | ROS TCP/UDP |
| 缓冲区 | 有 | 无 |
| 实时性 | 弱 | 强 |
| 节点关系 | 多对多 | 一对多(一个Server) |
| 使用场景 | 弱逻辑处理,多数据传输 | 强逻辑处理,少数数据传输 |

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐
 14
14 0
0- 0



 已为社区贡献5条内容
已为社区贡献5条内容

所有评论(0)