水下机器人控制与路径跟踪仿真
它的核心思想是根据系统的偏差(即期望值与实际值的差),通过比例、积分和微分三个环节的计算,来调整系统的输出,使得系统更快、更准确地达到目标状态。总之,增量 PID 在水下机器人路径跟踪中的应用,为我们提供了一种有效的解决方案。增量 PID 的核心思想是将控制输入分解为增量量,即每次只调整当前的控制输入,而不考虑之前的所有历史信息。在实际应用中,水下机器人的路径跟踪还需要考虑更多因素,比如环境的动态
增量PID轨迹跟踪 MATLAB仿真 水下机器人控制 无人船无人艇 USV路径跟随
大家好!今天我将和大家分享一个有趣的主题:增量PID轨迹跟踪在水下机器人中的应用。这个主题结合了控制理论、算法优化和实际工程应用,非常值得探讨。
首先,我想先介绍一下PID控制是什么。PID控制全称是比例积分微分控制,是一种经典的控制算法,广泛应用于工业控制、机器人控制等领域。它的核心思想是根据系统的偏差(即期望值与实际值的差),通过比例、积分和微分三个环节的计算,来调整系统的输出,使得系统更快、更准确地达到目标状态。
现在,我们来看看水下机器人。水下机器人,也就是无人船(UV)和无人艇(USV),它们在海洋中执行各种任务,比如搜索与打捞、环境监测、物资运输等。这些机器人的路径跟踪控制是其核心功能之一,确保它们能够准确地沿着预定路径行驶。
然而,水下环境具有很多特殊性。首先,水下机器人需要应对复杂的水流环境,水流的速度和方向可能随时间变化。其次,水下机器人本身具有一定的惯性,控制它们需要更长的时间响应。此外,水下机器人还受到水声、传感器噪声等因素的影响,这些都会影响控制效果。
那么,如何实现水下机器人 accurate path tracking 呢?这里,我们可以采用 PID 控制算法。PID 控制器通过调整控制输入,使得系统的输出(即机器人位置)能够快速跟踪预定轨迹。
传统 PID 控制器的结构非常简单,由比例、积分和微分三个部分组成,数学表达式为:
u(t) = Kp e(t) + Ki ∫e(τ) dτ + K_d * (e(t) - e(t-1))
其中,u(t) 是控制输入,e(t) 是偏差,Kp、Ki、K_d 是比例、积分、微分增益。
然而,传统 PID 控制器在某些情况下可能会遇到问题。例如,当系统存在时滞或高频干扰时,可能会导致跟踪精度下降,甚至出现振荡。因此,如何改进 PID 控制器的性能,是一个值得探讨的问题。
这里,我想介绍一种改进型 PID 控制器——增量 PID。增量 PID 的核心思想是将控制输入分解为增量量,即每次只调整当前的控制输入,而不考虑之前的所有历史信息。这样做的好处在于,增量 PID 可以更好地处理系统中的时滞和不确定性,提高跟踪精度。
增量 PID 的数学表达式为:
Δu(t) = Kp e(t) + Ki ∫e(τ) dτ + K_d * (e(t) - e(t-1))
其中,Δu(t) 是控制输入的增量,u(t) = u(t-1) + Δu(t)。
通过比较传统 PID 和增量 PID,可以发现两者的区别主要在于控制输入的计算方式。传统 PID 是直接计算当前的控制输入,而增量 PID 是计算相对于前一次的增量。这种改进使得增量 PID 更加鲁棒,尤其是在处理时滞较大的系统时。
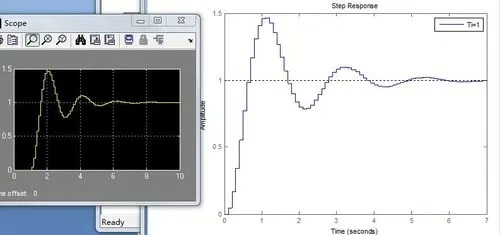
接下来,我将通过一个 MATLAB 仿真实例,来展示增量 PID 在水下机器人路径跟踪中的应用效果。
首先,我们建立一个简单的水下机器人运动模型。假设机器人在二维平面内运动,其位置由坐标 (x, y) 表示。机器人需要跟踪的轨迹是一条复杂的曲线,比如螺旋形或波浪形。为了实现路径跟踪,我们需要设计一个 PID 控制器,使得机器人能够沿着预定轨迹移动。
在 MATLAB 中,我们可以使用 ode45 求解器来模拟机器人运动。设机器人在 x 和 y 方向的加速度分别为 ax 和 ay,那么:
ax = -Kp (xref - x) - Ki ∫(xref - x) dt - Kd * (axprev)
ay = -Kp (yref - y) - Ki ∫(yref - y) dt - Kd * (ayprev)
其中,xref 和 yref 是当前时间的参考位置,axprev 和 ayprev 是上一次的加速度。
通过调整 PID 增益 Kp、Ki、K_d,可以得到不同的控制效果。传统 PID 和增量 PID 的效果会有显著差异。增量 PID 在处理时滞较大的情况下,能够更好地跟踪目标轨迹,同时保持系统稳定性。
通过这个仿真实验,我们可以直观地看到增量 PID 在水下机器人路径跟踪中的优势。此外,还可以进一步研究不同参数设置对系统性能的影响,以及在不同环境条件下的鲁棒性。
总结一下,增量 PID 在水下机器人路径跟踪中的应用,具有以下优势:
- 增量 PID 通过分解控制输入为增量量,能够更好地处理系统中的时滞和不确定性。
- 增量 PID 在高阶系统中具有更好的稳定性,尤其是在存在高频干扰或系统时滞的情况下。
- 增量 PID 的结构简单,易于实现,适合实际工程应用。
当然,这个只是一个基本的仿真例子。在实际应用中,水下机器人的路径跟踪还需要考虑更多因素,比如环境的动态变化、机器人自身的物理限制、传感器的精度等。因此,如何在复杂的实际环境中优化 PID 控制器,是一个值得深入研究的方向。
最后,我想强调的是,理论与实践的结合非常重要。在进行仿真研究的同时,也应该进行实验验证,以确保算法在实际系统中的有效性。通过不断的实验和调整,才能得到满意的控制效果。
总之,增量 PID 在水下机器人路径跟踪中的应用,为我们提供了一种有效的解决方案。通过 MATLAB 仿真,我们可以深入理解算法的工作原理,同时为实际应用打下基础。希望这篇文章能够激发大家对水下机器人控制和 PID 控制算法的兴趣,共同推动相关领域的研究与技术进步。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐
 25
25 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)