ROS系统URDF机器人建模
本文介绍了在ROS中使用URDF文件实现机器人模型可视化的方法。通过创建包含底盘、传感器等部件的URDF文件,利用XML语法描述机器人结构,包括几何形状(立方体/圆柱体/球体)、材质颜色和坐标系偏移等属性。详细说明了RViz的配置流程,包括添加RobotModel组件、设置固定坐标系和保存配置文件等关键步骤。同时提供了优化RViz启动的方法,通过launch文件参数自动加载配置文件。最终实现了在R
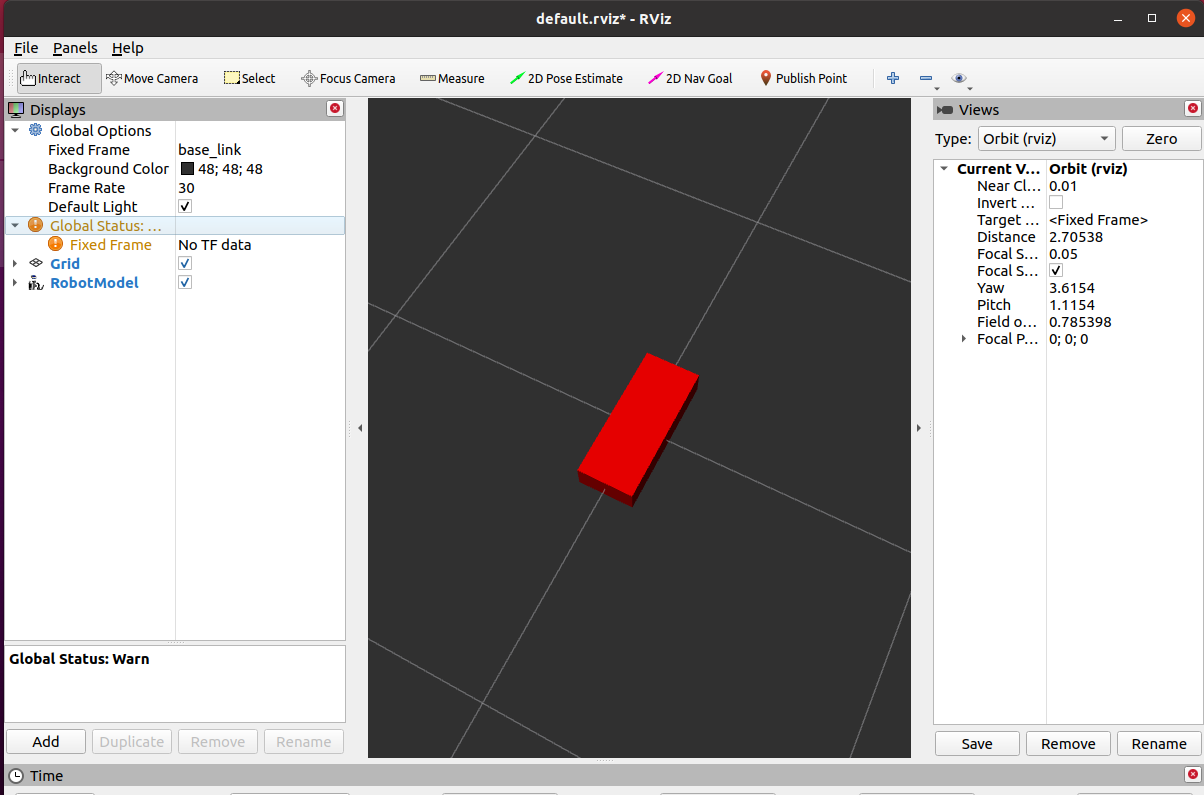
1:在rviz显示红色小方块
可以以一种 XML 的方式描述机器人的部分结构,比如底盘、摄像头、激光雷达、机械臂以及不同关节的自由度.....,该文件可以被 C++ 内置的解释器转换成可视化的机器人模型,是 ROS 中实现机器人仿真的重要组件。
安装git
sudo apt install git
下载课中要用到的文件
git clone https://github.com/zx595306686/sim_demo.git
得到如下文件:
本节所需要实现任务:在rviz显示红色小方块
1:新建功能包,导入依赖:urdf与xacro
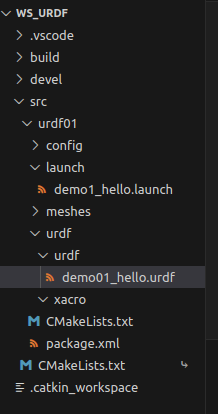
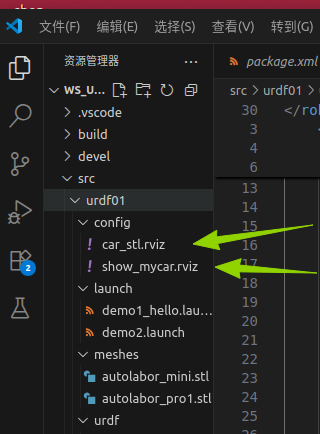
2:在当前功能包下,再新建几个目录:
urdf: 存储 urdf 文件的目录
meshes:机器人模型渲染文件(暂不使用)
config: 配置文件
launch: 存储 launch 启动文件
如图所示:
3:创建launch与urdf文件
urdf:
<robot name="mycar">
<link name="base_link">
<visual>
<geometry>
<box size="0.5 0.2 0.1" />
</geometry>
</visual>
</link>
</robot>launch:
<launch>
<!-- 设置参数 -->
<param name="robot_description" textfile="$(find urdf01)/urdf/urdf/demo01_hello.urdf" />
<!-- 启动 rviz -->
<node pkg="rviz" type="rviz" name="rviz" />
</launch>启动launch文件
roslaunch urdf01 demo1_hello.launch
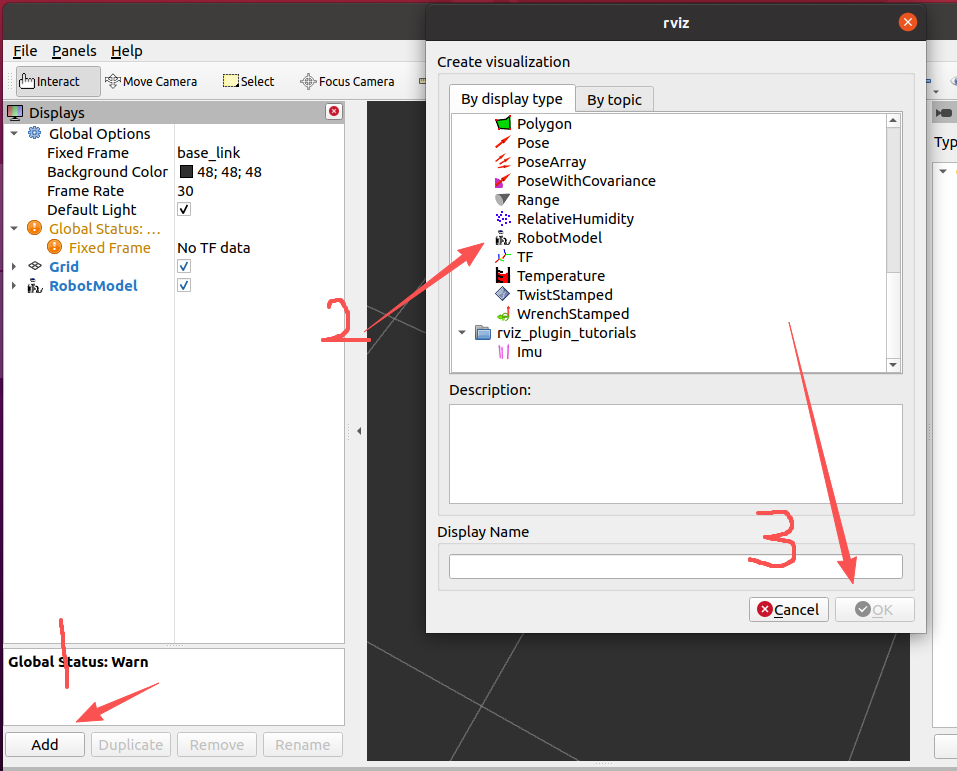
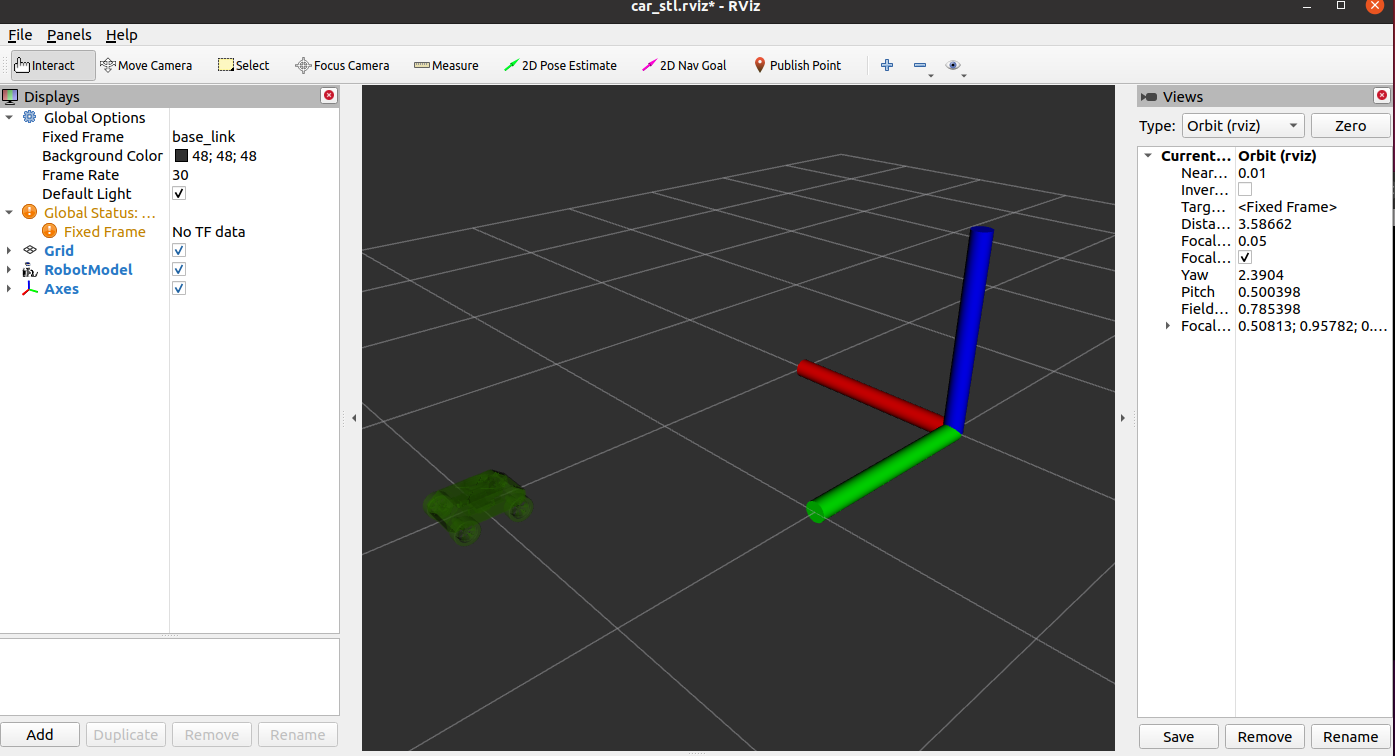
4:rviz 启动后,会发现并没有盒装的机器人模型,这是因为默认情况下没有添加机器人显示组件,需要手动添加,添加方式如下:
-
Fixed Frame: 要与launch文件设置的保持一致: <link name="base_link">。设置为
base_link→ 表示 RViz 的 “固定坐标系” 是你 URDF 中定义的base_link(机器人的基础连杆坐标系),所有数据都会基于这个坐标系显示。 -
Background Color:
48;48;48→ RViz 的背景色是深灰色(RGB 值为 48,48,48)。 -
Frame Rate:
30→ RViz 的渲染帧率为 30 帧 / 秒。 -
Grid: 已勾选→ 会在 RViz 中显示 “网格地面”,方便观察机器人的位置。
-
RobotModel: 已勾选→ 用于显示你定义的 URDF 机器人模型。
5:重复启动launch文件时,Rviz 之前的组件配置信息不会自动保存,需要重复执行步骤4的操作,为了方便使用,可以使用如下方式优化:
首先,将当前配置保存进config目录
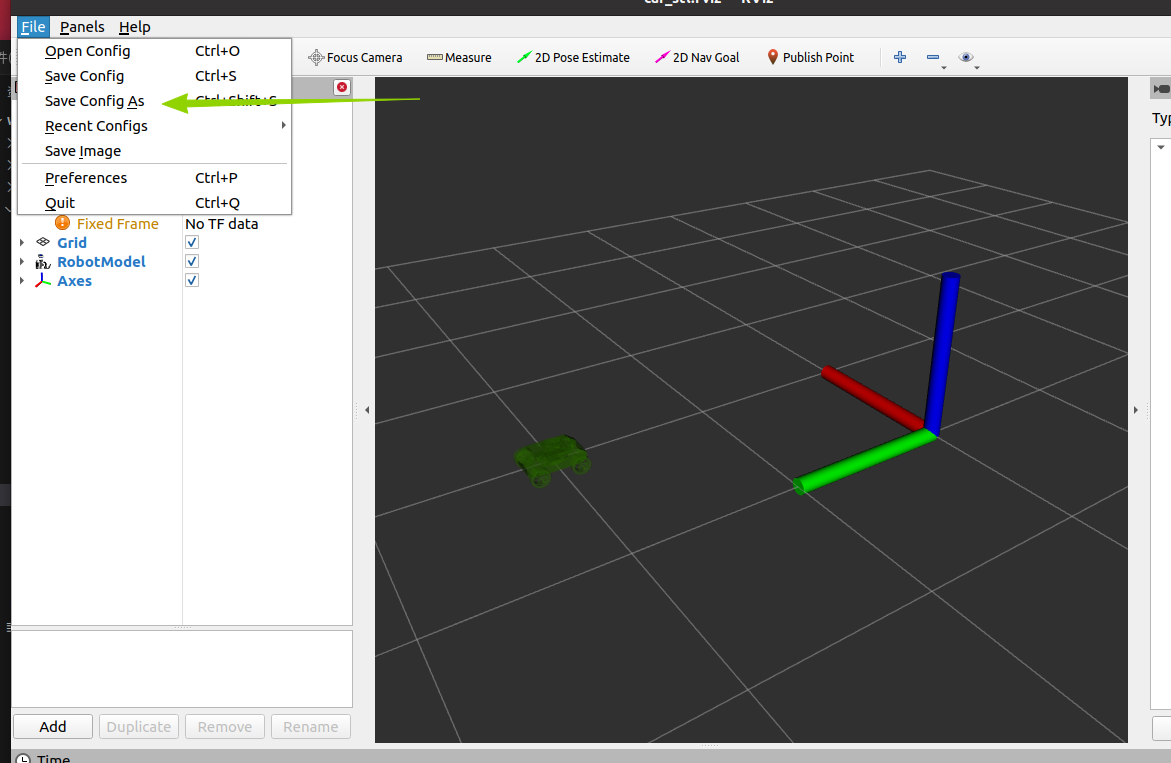
launch文件中 Rviz 的启动配置添加参数:args,值设置为-d 配置文件路径
<launch>
<!-- 设置参数 -->
<param name="robot_description" textfile="$(find urdf01)/urdf/urdf/demo_link.urdf" />
<!-- 启动 rviz -->
<node pkg="rviz" type="rviz" name="rviz" args="-d $(find urdf01)/config/car_stl.rviz" />
</launch>2:link语法
urdf 中的 link 标签用于描述机器人某个部件(也即刚体部分)的外观和物理属性,比如: 机器人底座、轮子、激光雷达、摄像头...每一个部件都对应一个 link, 在 link 标签内,可以设计该部件的形状、尺寸、颜色、惯性矩阵、碰撞参数等一系列属性。
1.属性
-
name ---> 为连杆命名
2.子标签
-
visual ---> 描述外观(对应的数据是可视的)
-
geometry 设置连杆的形状
-
标签1: box(盒状)
- 属性:size=长(x) 宽(y) 高(z)
-
标签2: cylinder(圆柱)
- 属性:radius=半径 length=高度
-
标签3: sphere(球体)
- 属性:radius=半径
-
标签4: mesh(为连杆添加皮肤)
-
属性: filename=资源路径(格式:package://<packagename>/<path>/文件)
-
-
-
origin 设置偏移量与倾斜弧度
-
属性1: xyz=x偏移 y便宜 z偏移
-
属性2: rpy=x翻滚 y俯仰 z偏航 (单位是弧度)
-
-
metrial 设置材料属性(颜色)
-
属性: name
-
标签: color
- 属性: rgba=红绿蓝权重值与透明度 (每个权重值以及透明度取值[0,1])
-
-
-
collision ---> 连杆的碰撞属性
-
Inertial ---> 连杆的惯性矩阵
代码如下:
<robot name="mycar">
<!--不同形状的机器人部件-->
<link name="base_link">
<visual>
<!-- 形状 -->
<geometry>
<!-- 长方体的长宽高 -->
<!-- <box size="0.5 0.3 0.1" /> -->
<!-- 圆柱,半径和长度 -->
<!-- <cylinder radius="0.5" length="0.1" /> -->
<!-- 球体,半径-->
<!-- <sphere radius="0.3" /> -->
<!-- 导入stl文件 -->
<mesh filename="package://urdf01/meshes/autolabor_mini.stl" />
</geometry>
<!-- 偏移量与倾斜弧度 -->
<origin xyz="1 2 0" rpy="1.57 0 0" />
<!-- 材料颜色 -->
<material name="black">
<color rgba="0.2 0.5 0 0.5" />
</material>
</visual>
</link>
</robot>显示结果:
3:joint语法
rdf 中的 joint 标签用于描述机器人关节的运动学和动力学属性,还可以指定关节运动的安全极限,机器人的两个部件,以"关节"的形式相连接,不同的关节有不同的运动形式: 旋转、滑动、固定、旋转速度、旋转角度限制。比如:安装在底座上的轮子可以360度旋转,而摄像头则可能是完全固定在底座上。
1.属性
-
name ---> 为关节命名
-
type ---> 关节运动形式
-
continuous: 旋转关节,可以绕单轴无限旋转
-
revolute: 旋转关节,类似于 continues,但是有旋转角度限制
-
prismatic: 滑动关节,沿某一轴线移动的关节,有位置极限
-
planer: 平面关节,允许在平面正交方向上平移或旋转
-
floating: 浮动关节,允许进行平移、旋转运动
-
fixed: 固定关节,不允许运动的特殊关节
-
2.子标签
-
parent(必需的)
parent link的名字是一个强制的属性:
- link:父级连杆的名字,是这个link在机器人结构树中的名字。
-
child(必需的)
child link的名字是一个强制的属性:
- link:子级连杆的名字,是这个link在机器人结构树中的名字。
-
origin
- 属性: xyz=各轴线上的偏移量 rpy=各轴线上的偏移弧度。
-
axis
- 属性: xyz用于设置围绕哪个关节轴运动。
launch文件:
<launch>
<param name="robot_description" textfile="$(find urdf01)/urdf/urdf/demo_join.urdf" />
<node pkg="robot_state_publisher" type="robot_state_publisher" name="robot_state_publisher" />
<node pkg="joint_state_publisher_gui" type="joint_state_publisher_gui" name="joint_state_publisher_gui" />
<node pkg="rviz" type="rviz" name="rviz" args="-d $(find urdf01)/config/car_stl.rviz" />
</launch>第一行:rviz会根据demo_join的内容去画出机器人,robot_description会存入机器人参数
第二行:负责读取 robot_description,找到机器人有哪些关节(Joint)。结合角度和模型尺寸,利用正运动学公式,算出每一个部件(Link)相对于世界坐标系的精确位置。发布:将计算结果以 /tf(坐标变换)的形式广播出去。
第三行:出现小滑块,当拖动滑块时,它也会向 /joint_states 话题发布关节角度信息。
第四行:pkg="rviz" type="rviz":启动 Rviz 软件。args:是加载启动参数
joint文件:
<!--
需求: 创建机器人模型,底盘为长方体,
在长方体的前面添加一摄像头,
摄像头可以沿着 Z 轴 360 度旋转
-->
<robot name="mycar">
<!-- 底盘 -->
<link name="base_link">
<visual>
<geometry>
<box size="0.5 0.2 0.1" />
</geometry>
<origin xyz="0 0 0" rpy="0 0 0" />
<material name="blue">
<color rgba="0 0 1.0 0.5" />
</material>
</visual>
</link>
<!-- 摄像头 -->
<link name="camera">
<visual>
<geometry>
<box size="0.02 0.05 0.05" />
</geometry>
<origin xyz="0 0 0" rpy="0 0 0" />
<material name="red">
<color rgba="1 0 0 0.5" />
</material>
</visual>
</link>
<!-- 关节 -->
<joint name="camera2baselink" type="continuous">
<parent link="base_link"/>
<child link="camera" />
<!-- 需要计算两个 link 的物理中心之间的偏移量 -->
<origin xyz="0.2 0 0.075" rpy="0 0 0" />
<axis xyz="0 0 1" />
</joint>
4:实践
创建一个四轮圆柱状机器人模型,机器人参数如下,底盘为圆柱状,半径 10cm,高 8cm,四轮由两个驱动轮和两个万向支撑轮组成,两个驱动轮半径为 3.25cm,轮胎宽度1.5cm,两个万向轮为球状,半径 0.75cm,底盘离地间距为 1.5cm(与万向轮直径一致)
实现如图效果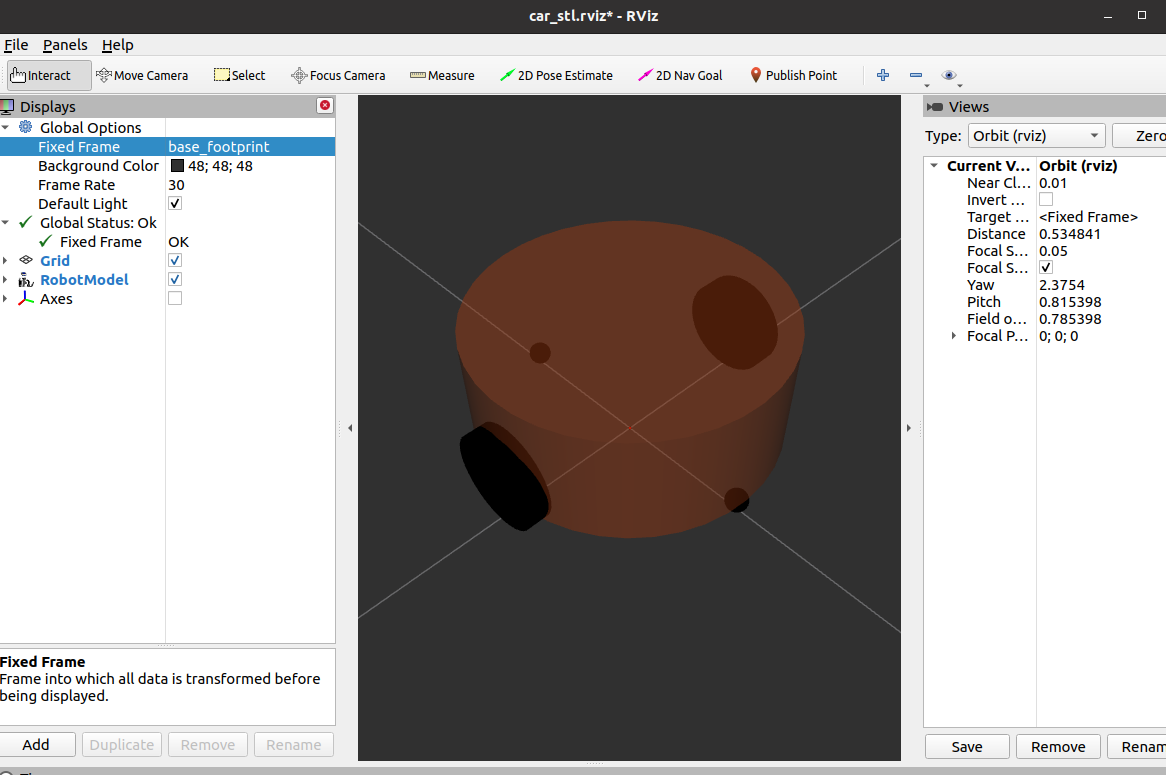
代码:
<robot name="mycar">
<!-- 设置 base_footprint -->
<link name="base_footprint">
<visual>
<geometry>
<sphere radius="0.001" />
</geometry>
</visual>
</link>
<!-- 添加底盘 -->
<!--
参数
形状:圆柱
半径:10 cm
高度:8 cm
离地:1.5 cm
-->
<link name="base_link">
<visual>
<geometry>
<cylinder radius="0.1" length="0.08" />
</geometry>
<origin xyz="0 0 0" rpy="0 0 0" />
<material name="yellow">
<color rgba="0.8 0.3 0.1 0.5" />
</material>
</visual>
</link>
<joint name="base_link2base_footprint" type="fixed">
<parent link="base_footprint" />
<child link="base_link"/>
<origin xyz="0 0 0.055" />
</joint>
<!-- 添加驱动轮 -->
<!--
驱动轮是侧翻的圆柱
参数
半径: 3.25 cm
宽度: 1.5 cm
颜色: 黑色
关节设置:
x = 0
y = 底盘的半径 + 轮胎宽度 / 2
z = 离地间距 + 底盘长度 / 2 - 轮胎半径 = 1.5 + 4 - 3.25 = 2.25(cm)
axis = 0 1 0
-->
<link name="left_wheel">
<visual>
<geometry>
<cylinder radius="0.0325" length="0.015" />
</geometry>
<origin xyz="0 0 0" rpy="1.5705 0 0" />
<material name="black">
<color rgba="0.0 0.0 0.0 1.0" />
</material>
</visual>
</link>
<joint name="left_wheel2base_link" type="continuous">
<parent link="base_link" />
<child link="left_wheel" />
<origin xyz="0 0.1 -0.0225" />
<axis xyz="0 1 0" />
</joint>
<link name="right_wheel">
<visual>
<geometry>
<cylinder radius="0.0325" length="0.015" />
</geometry>
<origin xyz="0 0 0" rpy="1.5705 0 0" />
<material name="black">
<color rgba="0.0 0.0 0.0 1.0" />
</material>
</visual>
</link>
<joint name="right_wheel2base_link" type="continuous">
<parent link="base_link" />
<child link="right_wheel" />
<origin xyz="0 -0.1 -0.0225" />
<axis xyz="0 1 0" />
</joint>
<!-- 添加万向轮(支撑轮) -->
<!-- 添加万向轮(支撑轮) -->
<!--
参数
形状: 球体
半径: 0.75 cm
颜色: 黑色
关节设置:
x = 自定义(底盘半径 - 万向轮半径) = 0.1 - 0.0075 = 0.0925(cm)
y = 0
z = 底盘长度 / 2 + 离地间距 / 2 = 0.08 / 2 + 0.015 / 2 = 0.0475
axis= 1 1 1
-->
<link name="front_wheel">
<visual>
<geometry>
<sphere radius="0.0075" />
</geometry>
<origin xyz="0 0 0" rpy="0 0 0" />
<material name="black">
<color rgba="0.0 0.0 0.0 1.0" />
</material>
</visual>
</link>
<joint name="front_wheel2base_link" type="continuous">
<parent link="base_link" />
<child link="front_wheel" />
<origin xyz="0.0925 0 -0.0475" />
<axis xyz="1 1 1" />
</joint>
<link name="back_wheel">
<visual>
<geometry>
<sphere radius="0.0075" />
</geometry>
<origin xyz="0 0 0" rpy="0 0 0" />
<material name="black">
<color rgba="0.0 0.0 0.0 1.0" />
</material>
</visual>
</link>
<joint name="back_wheel2base_link" type="continuous">
<parent link="base_link" />
<child link="back_wheel" />
<origin xyz="-0.0925 0 -0.0475" />
<axis xyz="1 1 1" />
</joint>
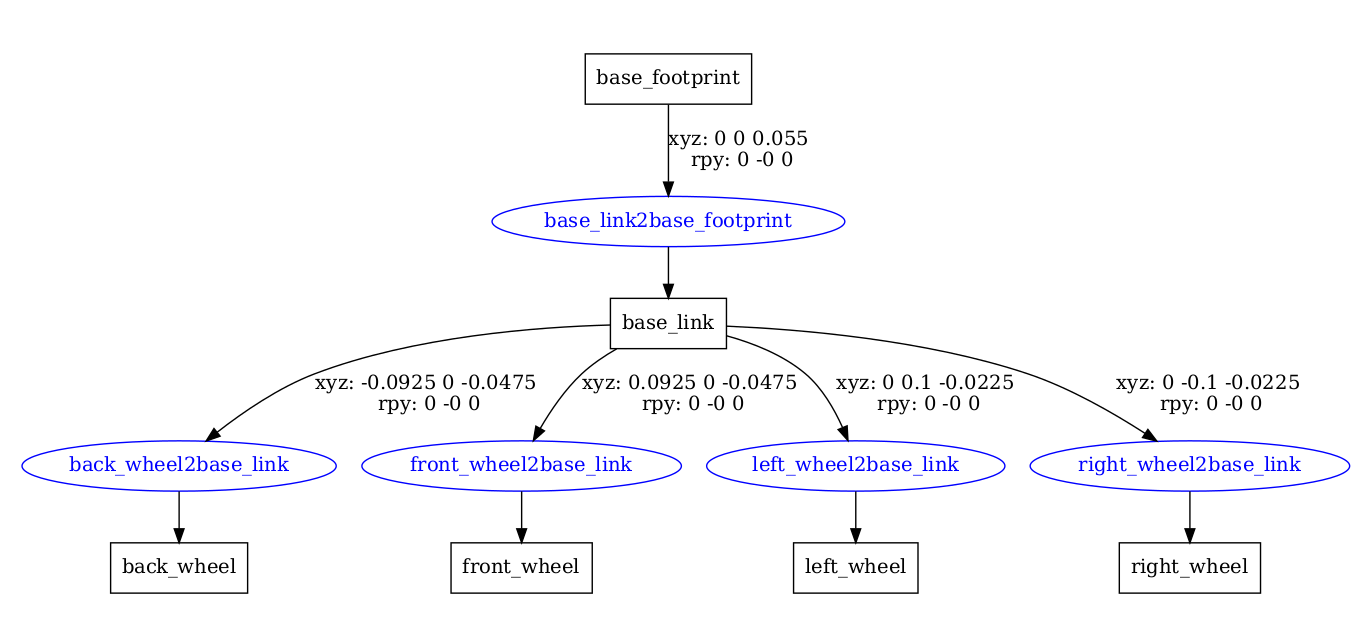
</robot>主要是采用上述link与joint的知识点,进行完整的建立模型。采用了经典的三层架构(base_footprint -> base_link -> wheels),包含一个圆柱体底盘、两个驱动轮和两个万向支撑轮。
<link name="base_footprint">
<visual>
<geometry> <sphere radius="0.001" /> </geometry>
</visual>
</link>使用了一个极小半径(1mm)的球体,几乎不可见,仅用于定位原点。
launch文件:
<launch>
<param name="robot_description" textfile="$(find urdf01)/urdf/urdf/demo04_test.urdf" />
<node pkg="robot_state_publisher" type="robot_state_publisher" name="robot_state_publisher" />
<node pkg="joint_state_publisher_gui" type="joint_state_publisher_gui" name="joint_state_publisher_gui" />
<node pkg="rviz" type="rviz" name="rviz" args="-d $(find urdf01)/config/car_stl.rviz" />
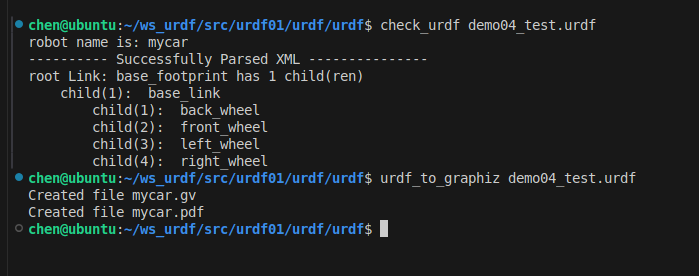
</launch>5:urdf_to_graphiz
sudo apt install liburdfdom-tools安装工具,可以通过pdf直接看不同link的对应关系

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐

 1
1 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)