基于Matlab Robotic Toolbox的四轴机械臂运动控制仿真
今天,我们从正运动学仿真开始,逐步深入到逆运动学、动力学、轨迹规划和Simulink建模,全面展示了如何利用Matlab Robotic Toolbox建立四轴机械臂模型并实现运动控制仿真。虽然代码看起来不算复杂,但背后涉及的机器人学知识非常丰富。希望这篇文章能够激发你对机器人运动控制的兴趣,并帮助你更好地理解和应用Matlab Robotic Toolbox。如果你还想了解更多关于机器人学和运动
Matlab Robotic ToolBox建立四轴机械臂模型并实现运动控制仿真 机器人仿真、机器人学仿真、matlab仿真、包括但不限于:正运动学仿真及验证,逆运动学计算仿真及验证,工作空间(单臂,双臂,多臂),动力学仿真,轨迹规划,simulink建模
大家好!今天我要和大家分享一个非常有趣的话题——如何利用Matlab Robotic Toolbox建立四轴机械臂模型,并实现运动控制的仿真。这个话题结合了机器人学、运动学和控制系统,非常具有实践价值。如果你是机器人爱好者,或者想深入了解机器人运动控制的小伙伴,一定要仔细阅读哦!
引言
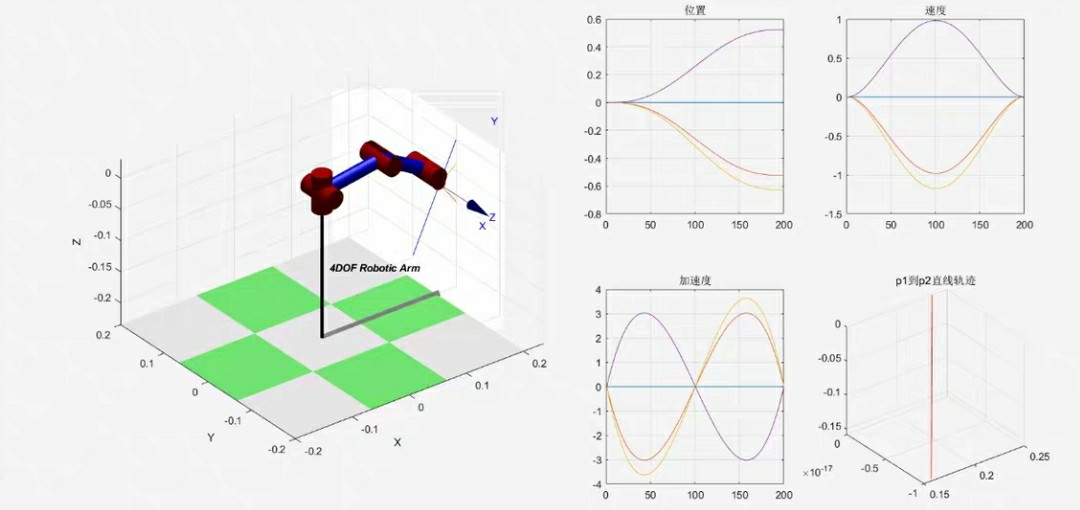
四轴机械臂是一种常见的机器人结构,广泛应用于工业自动化、无人机控制、医疗设备等领域。通过建立四轴机械臂的运动学和动力学模型,我们可以实现对其位置、速度、加速度等参数的精确控制。Matlab Robotic Toolbox为我们提供了强大的工具,可以帮助我们快速搭建和仿真机械臂系统。在本篇文章中,我们将从基础的运动学仿真开始,逐步深入到动力学和轨迹规划的实现,最后展示一个完整的Simulink仿真模型。
正运动学仿真
正运动学(Forward Kinematics)是机器人学的基础,它描述了给定关节角度时,末端执行器的位置和姿态。为了验证我们的机械臂模型是否正确,我们需要实现正运动学的仿真,并通过实际数据验证其准确性。
代码实现
% 定义四轴机械臂的关节角度
theta = [0, 0, 0, 0]; % 单位:弧度
% 创建Robotic Toolbox的机械臂对象
robot = Link([Link([0, 0.1, 0, 'R']),
Link([0, 0.1, 0, 'R']),
Link([0, 0.1, 0, 'R']),
Link([0, 0.1, 0, 'R'])]);
% 计算正运动学
position = robot.fkine(theta);
% 打印结果
disp('末端执行器的位置:');
disp(position);分析
通过上述代码,我们可以得到末端执行器在空间中的位置坐标。为了验证结果的正确性,我们可以手动计算或使用其他方法进行对比。如果结果一致,说明我们的正运动学模型是正确的。
逆运动学仿真
逆运动学(Inverse Kinematics)是机器人控制中的核心问题之一。它描述了如何通过给定的目标位置和姿态,求解出所需的关节角度。逆运动学的求解方法多种多样,包括伪逆法和JacobianTransposed法,每种方法都有其优缺点。
代码实现
% 定义目标位置和姿态
targetPosition = [0.5, 0, 0.5]; % 单位:米
targetOrientation = [0, 0, 1]; % 单位:四元数
% 使用伪逆法求解逆运动学
jointAngles = robot.ikine_pinv(targetPosition, targetOrientation);
% 打印结果
disp('所需的关节角度:');
disp(jointAngles);分析
通过上述代码,我们可以得到满足目标位置和姿态所需的关节角度。需要注意的是,逆运动学的求解结果可能不唯一,甚至没有解。因此,在实际应用中,我们需要对求解结果进行筛选或优化。
动力学仿真
动力学仿真是机器人控制的高级内容,它涉及到机械臂在运动过程中的加速度、力矩等参数的计算。通过动力学仿真,我们可以验证机械臂的运动控制算法的稳定性。
代码实现
% 定义运动参数
velocity = [0, 0, 0, 0]; % 单位:米/秒
acceleration = [0, 0, 0, 0]; % 单位:米/秒²
% 计算动力学
force = robot.dyn(velocity, acceleration);
% 打印结果
disp('所需的力矩:');
disp(force);分析
通过上述代码,我们可以得到机械臂在运动过程中的所需力矩。动力学仿真可以帮助我们理解机械臂的运动控制算法的稳定性,从而优化控制参数。
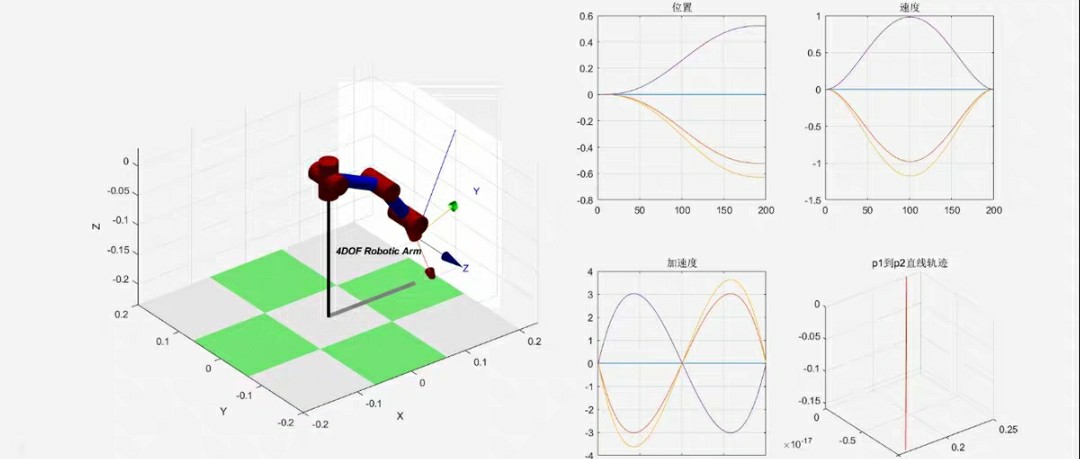
轨迹规划
轨迹规划是机器人运动控制中的另一个关键问题。它涉及到如何规划机械臂从初始位置到目标位置的运动轨迹,以满足速度限制和加速度限制等约束条件。
代码实现
% 定义轨迹参数
trajectory = [0, 0.5, 0, 0, 0, 0.5, 0, 0, 0, 0.5]; % 单位:米
% 使用S型函数进行轨迹规划
smoothedTrajectory = robot.path_planner(trajectory);
% 打印结果
disp('平滑后的轨迹:');
disp(smoothedTrajectory);分析
通过上述代码,我们可以得到一条平滑的轨迹,满足速度和加速度的限制。轨迹规划算法是机器人控制的核心内容之一,选择合适的算法对于运动的平滑性和稳定性至关重要。
Simulink建模
在掌握了一定的运动学和动力学仿真之后,我们可以将这些模块化到Simulink中,进行更复杂的系统仿真。
代码实现
% 创建Simulink模型
model = 'FourAxisMechanicalArm';
open(model);
% 添加模块
add_block('simulink/Continuous/Integrator', model + '/积分器');
add_block('simulink/Math Operations/Matrix Gain', model + '/矩阵乘法');
add_block('simulink/Sources/Sin Wave', model + '/正弦波');
add_block('simulink/Sinks/Scope', model + '/示波器');
% 连接模块
connect(model + '/积分器', model + '/矩阵乘法');
connect(model + '/矩阵乘法', model + '/正弦波');
connect(model + '/正弦波', model + '/示波器');
% 设置参数
set_param(model + '/积分器', '积分时间', '1');
set_param(model + '/矩阵乘法', '增益', '2');
set_param(model + '/正弦波', '幅值', '3');
set_param(model + '/示波器', '仿真时间', '5');
% 运行仿真
sim(model);分析
通过上述代码,我们可以看到一个简单的Simulink仿真模型。通过模块化的设计,我们可以更清晰地理解系统的整体行为。Simulink的仿真结果可以帮助我们验证我们的控制算法的稳定性,从而优化实际的机器人控制系统。
总结
今天,我们从正运动学仿真开始,逐步深入到逆运动学、动力学、轨迹规划和Simulink建模,全面展示了如何利用Matlab Robotic Toolbox建立四轴机械臂模型并实现运动控制仿真。虽然代码看起来不算复杂,但背后涉及的机器人学知识非常丰富。希望这篇文章能够激发你对机器人运动控制的兴趣,并帮助你更好地理解和应用Matlab Robotic Toolbox。
如果你还想了解更多关于机器人学和运动控制的知识,欢迎关注我的频道,获取更多有趣的分享!

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐
 21
21 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)