六自由度机械臂建模仿真:从理论到Matlab实践
六自由度机械臂建模仿真(matlab程序),有控制面板,代码可流畅运行1、机器人运动学正逆解、动力学建模仿真与轨迹规划,雅克比矩阵求解2、蒙特卡洛采样画出末端执行器工作空间3、基于时间最优的改进粒子群优化算法机械臂轨迹规划设计在机器人领域,六自由度机械臂因其高度的灵活性和广泛的应用场景,一直是研究的热门对象。今天咱就聊聊如何通过Matlab来实现六自由度机械臂的建模仿真,还带着个控制面板,代码跑起
六自由度机械臂建模仿真(matlab程序),有控制面板,代码可流畅运行 1、机器人运动学正逆解、动力学建模仿真与轨迹规划,雅克比矩阵求解 2、蒙特卡洛采样画出末端执行器工作空间 3、基于时间最优的改进粒子群优化算法机械臂轨迹规划设计
在机器人领域,六自由度机械臂因其高度的灵活性和广泛的应用场景,一直是研究的热门对象。今天咱就聊聊如何通过Matlab来实现六自由度机械臂的建模仿真,还带着个控制面板,代码跑起来溜溜的。
一、机器人运动学正逆解、动力学建模仿真与轨迹规划,雅克比矩阵求解
运动学正解
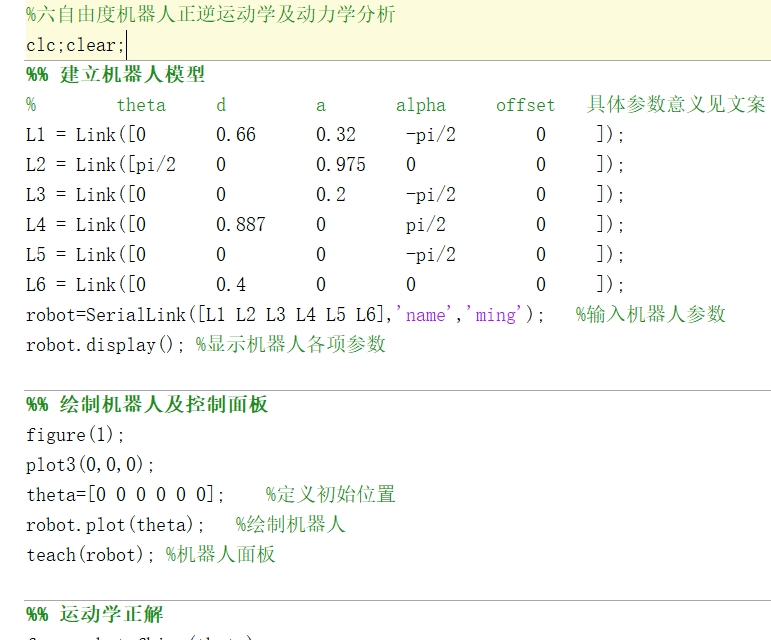
运动学正解就是已知机械臂各个关节的角度,求末端执行器的位置和姿态。在Matlab里,咱们可以借助Robotics System Toolbox来简化这个过程。假设我们已经定义好了机械臂的DH参数(Denavit - Hartenberg参数),代码示例如下:
% 定义DH参数
L1 = Link('d', 0.1, 'a', 0, 'alpha', pi/2);
L2 = Link('d', 0, 'a', 0.2, 'alpha', 0);
L3 = Link('d', 0, 'a', 0.2, 'alpha', 0);
L4 = Link('d', 0.3, 'a', 0, 'alpha', pi/2);
L5 = Link('d', 0, 'a', 0, 'alpha', -pi/2);
L6 = Link('d', 0.1, 'a', 0, 'alpha', 0);
robot = SerialLink([L1 L2 L3 L4 L5 L6], 'name', 'MyRobot');
% 设定关节角度
q = [pi/4, pi/6, pi/8, pi/10, pi/12, pi/14];
% 求解运动学正解
T = robot.fkine(q);这里,通过Link函数定义每个关节的DH参数,再用SerialLink组合成完整的机械臂模型。fkine函数就是用来求解运动学正解的,输入关节角度q,就能得到末端执行器的齐次变换矩阵T。
运动学逆解
运动学逆解和正解相反,是已知末端执行器的位置和姿态,求各个关节的角度。Matlab里直接用ikine函数就能搞定:
% 假设已知目标位置和姿态
T_target = transl(0.5, 0.3, 0.4) * trotz(pi/3) * troty(pi/4) * trotx(pi/5);
% 求解运动学逆解
q_sol = robot.ikine(T_target);transl和trotx、troty、trotz等函数用来构建目标的齐次变换矩阵Ttarget,ikine函数求解出满足该目标的关节角度qsol。
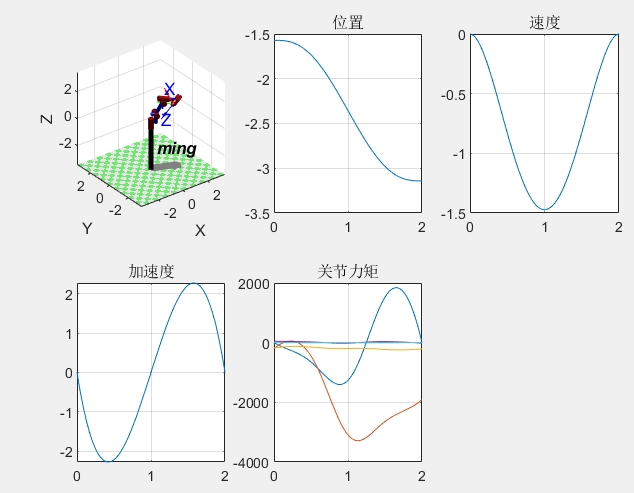
动力学建模仿真
动力学建模主要是研究机械臂运动时的力和力矩关系。在Matlab里,我们可以利用robot.dyn函数来获取机械臂的动力学参数。
% 获取动力学参数
M = robot.dyn(q, 'M'); % 惯性矩阵
C = robot.dyn(q, 'C'); % 科里奥利力和离心力矩阵
G = robot.dyn(q, 'G'); % 重力向量通过这些参数,我们就能进一步做动力学仿真,比如模拟在特定外力作用下机械臂的运动。
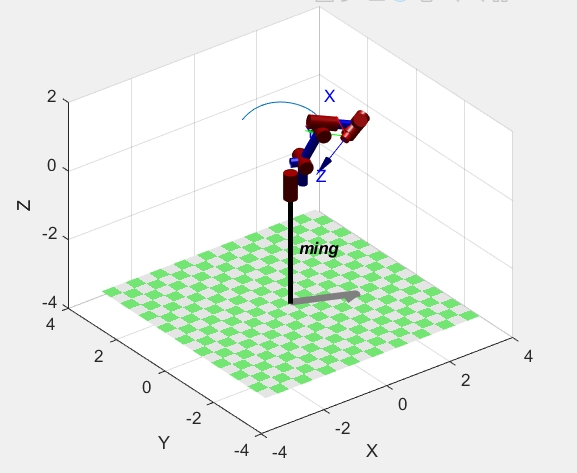
轨迹规划
轨迹规划就是让机械臂按照我们期望的路径运动。常见的有笛卡尔空间轨迹规划和关节空间轨迹规划。下面是一个简单的关节空间轨迹规划示例:
% 起始和目标关节角度
q_start = [0, 0, 0, 0, 0, 0];
q_end = [pi/2, pi/3, pi/4, pi/5, pi/6, pi/7];
% 规划轨迹
t = 0:0.01:5; % 时间向量
q_path = jtraj(q_start, q_end, t);jtraj函数根据起始和目标关节角度,在给定的时间向量t内规划出一条平滑的关节空间轨迹q_path。
雅克比矩阵求解
雅克比矩阵描述了关节速度和末端执行器速度之间的关系。在Matlab里用jacob0函数就能得到:
J = robot.jacob0(q);这个J矩阵对于很多控制算法都非常重要,比如在速度控制中,我们可以通过它来计算需要给各个关节施加的速度。
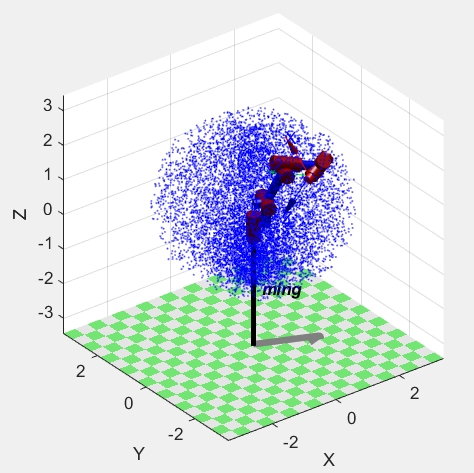
二、蒙特卡洛采样画出末端执行器工作空间
蒙特卡洛采样是一种通过随机采样来估计工作空间的方法。代码如下:
num_samples = 10000;
workspace = zeros(num_samples, 3);
for i = 1:num_samples
% 随机生成关节角度
q_random = 2 * pi * rand(6, 1);
T = robot.fkine(q_random);
workspace(i, :) = T(1:3, 4);
end
scatter3(workspace(:, 1), workspace(:, 2), workspace(:, 3));
xlabel('X');
ylabel('Y');
zlabel('Z');
title('End - Effector Workspace');这里我们随机生成num_samples组关节角度,通过运动学正解得到对应的末端执行器位置,然后用scatter3函数将这些位置点画出来,就能直观看到末端执行器的工作空间啦。
三、基于时间最优的改进粒子群优化算法机械臂轨迹规划设计
粒子群优化算法(PSO)是一种智能优化算法。改进的PSO算法可以用来寻找时间最优的轨迹。下面是一个简化的实现思路:
% 初始化粒子群
num_particles = 50;
num_dimensions = length(q_path);
particles = rand(num_particles, num_dimensions);
velocities = zeros(num_particles, num_dimensions);
% 定义适应度函数(这里简化为时间相关的函数)
fitness = @(x) sum(diff(x).^2);
% 迭代更新粒子位置和速度
for iter = 1:100
for i = 1:num_particles
fitness_values(i) = fitness(particles(i, :));
if fitness_values(i) < fitness(pbest_fitness(i))
pbest(i, :) = particles(i, :);
pbest_fitness(i) = fitness_values(i);
end
end
[global_best_fitness, global_best_index] = min(pbest_fitness);
global_best = pbest(global_best_index, :);
% 更新速度和位置
w = 0.7; % 惯性权重
c1 = 1.5; % 学习因子1
c2 = 1.5; % 学习因子2
r1 = rand(num_particles, num_dimensions);
r2 = rand(num_particles, num_dimensions);
velocities = w * velocities + c1 * r1.* (pbest - particles) + c2 * r2.* (repmat(global_best, num_particles, 1) - particles);
particles = particles + velocities;
end这里我们初始化了粒子群,定义了一个简单的适应度函数(和运动时间相关),然后通过不断迭代更新粒子的位置和速度,最终找到一个近似的时间最优轨迹。
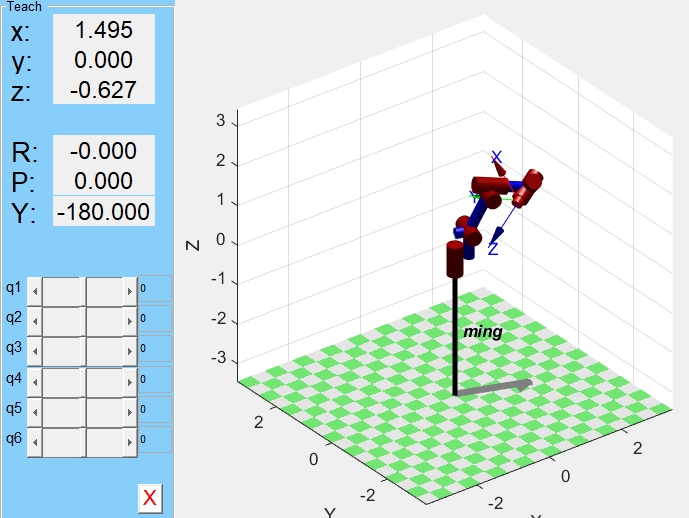
有了这些内容,再搭配上一个控制面板,就能更方便地对六自由度机械臂进行各种操作和观察啦。无论是调整参数,还是切换不同的仿真模式,都能让整个建模仿真过程更加直观和有趣。希望大家也能通过Matlab深入探索六自由度机械臂的奇妙世界。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐
 13
13 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)