【ROS 2 进阶】拒绝万向节死锁!从 Eigen 矩阵运算到 Rviz 四元数实战
📌 前言
很多初学者(包括之前的我)喜欢用欧拉角(Roll-Pitch-Yaw)来描述旋转,因为它直观。但在实际工程中,ROS 2 和 MuJoCo 底层强制使用 四元数 (Quaternion)。为什么?因为欧拉角有著名的“万向节死锁”问题。
这两天,我利用 Eigen 3 数学库和 ROS 2 TF2 工具,打通了从“数学推导”到“可视化验证”的全流程。本文将深入浅出地讲解背后的数学原理,并附上完整的 C++ 实现代码。
一、 理论核心:机器人是怎么“定位”的?
在写代码之前,必须先搞懂两个核心数学概念。
1. 齐次变换矩阵 (Homogeneous Transformation)
机器人身上的每个部件(雷达、相机、脚尖)都有自己的坐标系。我们要解决的问题通常是:已知障碍物在雷达坐标系 {B}\{B\}{B} 里的位置 BP{}^BPBP,求它在世界坐标系 {A}\{A\}{A} 里的位置 AP{}^APAP。
通用公式如下:
AP=BAT⋅BP {}^AP = {}^A_BT \cdot {}^BP AP=BAT⋅BP
这里的 BAT{}^A_BTBAT 是一个 4×44 \times 44×4 的大矩阵,它包含了两部分信息:
- 旋转 (RRR):3×33 \times 33×3 矩阵,描述 {B}\{B\}{B} 姿态相对于 {A}\{A\}{A} 转了多少。
- 平移 (PPP):3×13 \times 13×1 向量,描述 {B}\{B\}{B} 原点在 {A}\{A\}{A} 中的位置。
2. 为什么要用四元数 (Quaternion)?
我们在 ROS 2 的 msg.pose.orientation 里看到的 x, y, z, w 就是四元数。既然欧拉角(Roll, Pitch, Yaw)这么直观,为什么不用它?
💡 深度解析:什么是“万向节死锁” (Gimbal Lock)?
很多教程只说“欧拉角会导致死锁”,但很少解释清楚为什么。这里用一个**“高射炮打蚊子”**的例子来直观理解。
想象你操控一台双轴高射炮:
- 底座 (Yaw):负责水平 360° 旋转。
- 炮管 (Pitch):负责上下抬起。
正常情况:
蚊子在前方 45° 天空。你转动底座(左右移),抬起炮管(上下移)。“左”和“上”是两个独立的维度,你可以轻松瞄准任何位置。
死锁情况:
蚊子飞到了你的正头顶(天顶)。你把炮管垂直向上抬起 90度。
此时,如果你想让炮口往“原本的左边”稍微偏一点点(去追稍微飞偏的蚊子),你会发现做不到!
- 转动底座?炮口只是在原地自转(像螺旋桨一样),并没有指向新的方向。
- 转动炮管?只能让炮口降下来,离开天顶。
结论:当 Pitch = 90° 时,“水平转动”这个功能失效了(或者说它和“自转”重合了)。我们原本拥有两个自由度,现在丢失了一个,这就叫死锁。
四元数为何能解?
欧拉角是分步走(先转底座,再抬炮管),这导致了步骤之间的依赖。而四元数是一步到位:它直接定义空间中的一根轴(Vector),让物体绕着这根轴一次性转过去。既然是一次性成型,就不存在“谁卡住谁”的问题,从而彻底解决了死锁。
二、 代码实战 A:Eigen 3 与 ROS 2 的结合
C++ 标准库没有矩阵运算,所以我们必须引入 Eigen 3。这是机器人领域的标配数学库。
1. CMake 配置 (避坑点)
Eigen 是 Header-only (纯头文件) 库,不需要链接 .so 文件,但必须告诉编译器头文件在哪里。
CMakeLists.txt 关键配置:
find_package(Eigen3 REQUIRED)
# 关键:${Eigen3_INCLUDE_DIRS} 变量有时会失效
# 如果报错,可以直接指定系统路径:/usr/include/eigen3
target_include_directories(math_node PUBLIC
$<BUILD_INTERFACE:${CMAKE_CURRENT_SOURCE_DIR}/include>
${Eigen3_INCLUDE_DIRS}
)
2. 核心算法:欧拉角转四元数
利用 Eigen 的几何模块 (Eigen::Geometry),我们可以一行代码完成转换,避免手写复杂的三角函数。
#include <Eigen/Dense>
#include <Eigen/Geometry>
// 1. 定义欧拉角 (例如:绕 Z 轴旋转)
// ⚠️ 注意:计算机只认弧度,不认角度!务必转换!
double yaw_rad = 90.0 * M_PI / 180.0;
// 2. 使用 Axis-Angle (轴角) 构建旋转
// Vector3d::UnitZ() 代表 Z 轴 (0, 0, 1)
Eigen::AngleAxisd t_V(yaw_rad, Eigen::Vector3d::UnitZ());
// 3. 转换为四元数
Eigen::Quaterniond q(t_V);
// 4. 打印 (Eigen 顺序是 w, x, y, z)
RCLCPP_INFO(this->get_logger(), "四元数: w=%.2f, x=%.2f, y=%.2f, z=%.2f",
q.w(), q.x(), q.y(), q.z());
三、 代码实战 B:TF2 广播与 Rviz 可视化
为了验证我们的四元数是对的,我写了一个 ROS 2 节点,利用 tf2_ros 把计算结果广播出去,然后在 Rviz 里看箭头转动。
1. TF 广播器代码要点
// 创建 TF 消息
geometry_msgs::msg::TransformStamped t;
t.header.stamp = this->get_clock()->now();
// ⚠️ 关键设置:父子坐标系不能搞反!
t.header.frame_id = "world"; // 父坐标系 (不动)
t.child_frame_id = "my_dog"; // 子坐标系 (旋转的物体)
// 填充我们算出来的四元数
t.transform.rotation.w = q.w();
t.transform.rotation.x = q.x();
// ...
// 发送!
tf_broadcaster_->sendTransform(t);
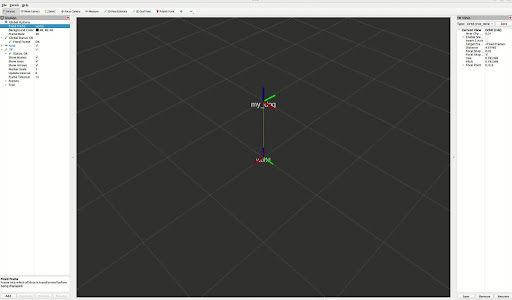
2. 成果展示
在 Rviz2 中添加 TF 插件,将 Fixed Frame 设为 world,成功看到了一根离地 1 米的坐标轴正在绕 Z 轴旋转。
四、 总结与展望
- 数学 是机器人的灵魂。
- ROS 2 是机器人的神经。
- Eigen 是连接两者的桥梁。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐
 49
49 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)