探索路径规划算法:DWA、A*、RRT 及其融合
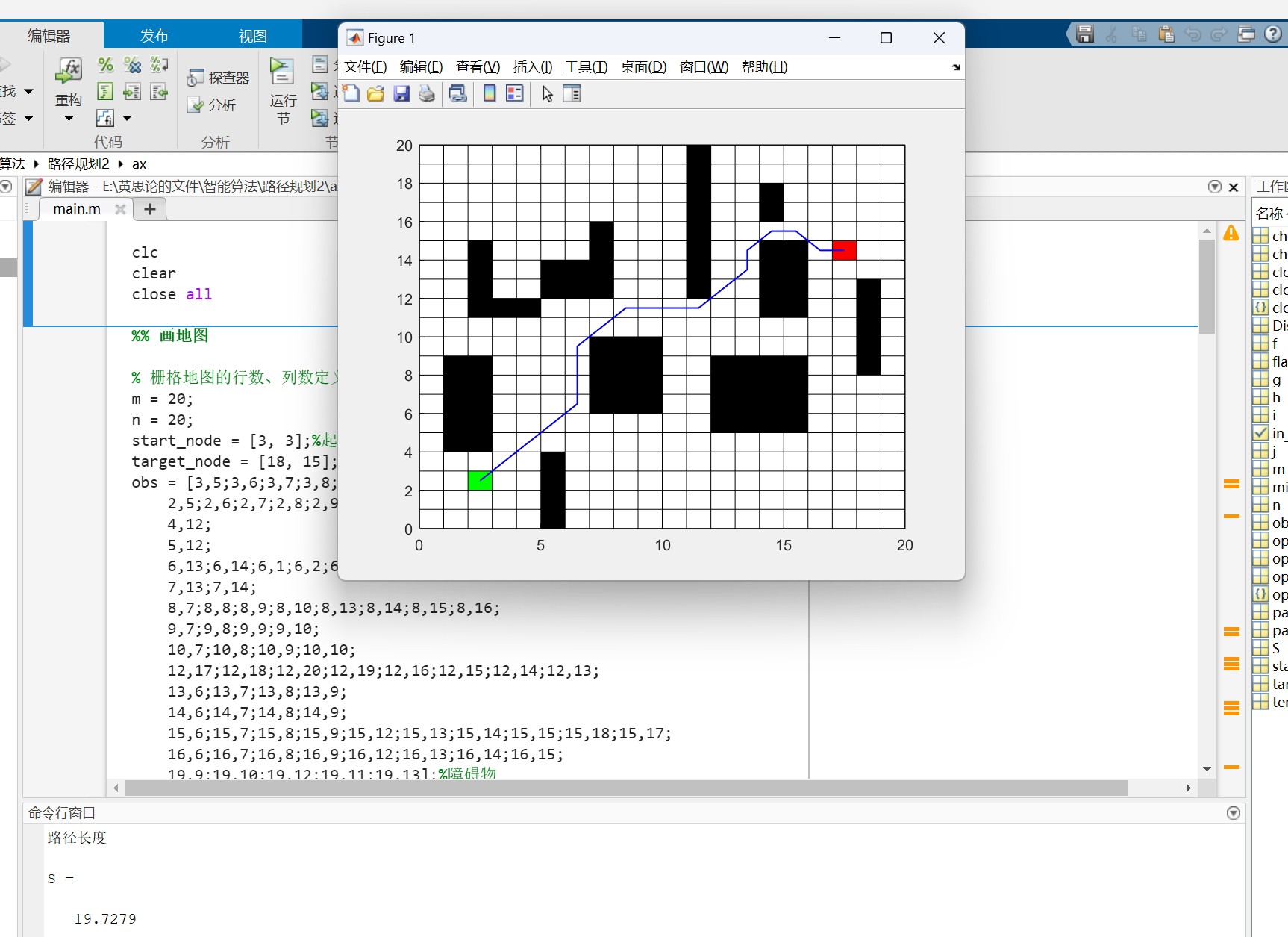
为了测试这些算法,我们可以自定义地图。以简单的二维地图为例,地图可以用二维数组表示,0 表示自由空间,1 表示障碍物。map = [在实际应用中,地图可以从文件读取或者通过传感器实时生成。以上这些算法各有优劣,在实际项目中,我们可以根据具体场景选择合适的算法或者算法融合方案。希望这篇博文能帮助你对路径规划算法有更深入的了解。运行效果就像我们看到的图示那样,不同算法在自定义地图上各展神通,为机器人规
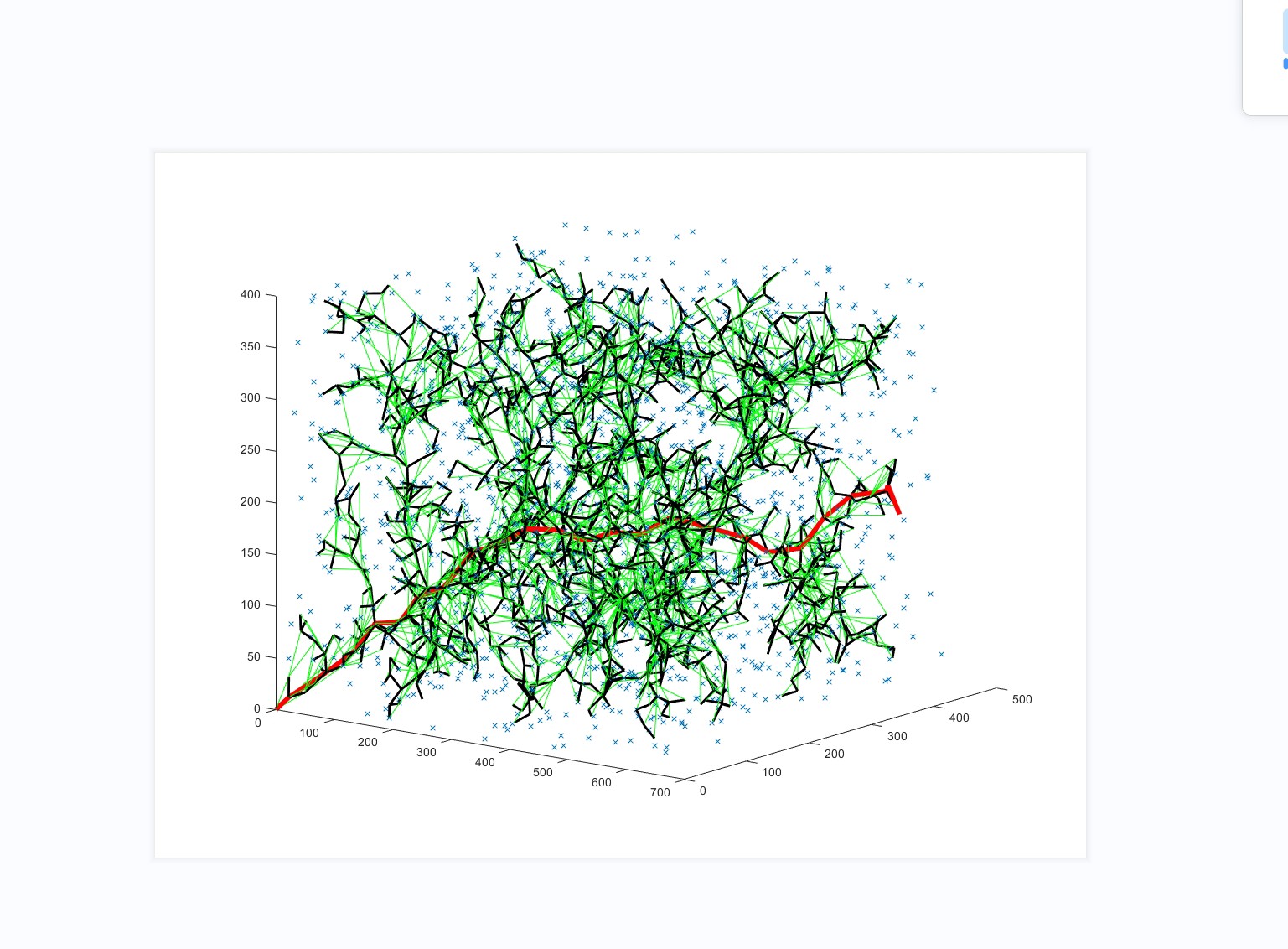
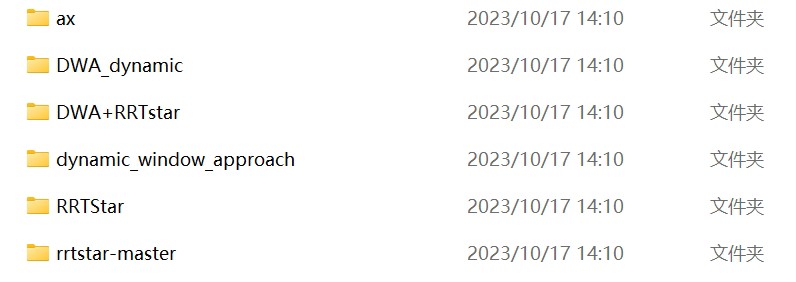
DWA算法与RRT*融合算法,。 还有单独dwa,单独A*,RRT,RRT*(2/3d地图)等路径规划算法,可自定义地图。 运行效果如图所示
在机器人运动规划领域,路径规划算法一直是核心话题。今天咱们就唠唠 DWA 算法、A算法、RRT 算法以及 RRT算法,还有它们之间的融合,以及如何自定义地图来测试这些算法。
DWA 算法
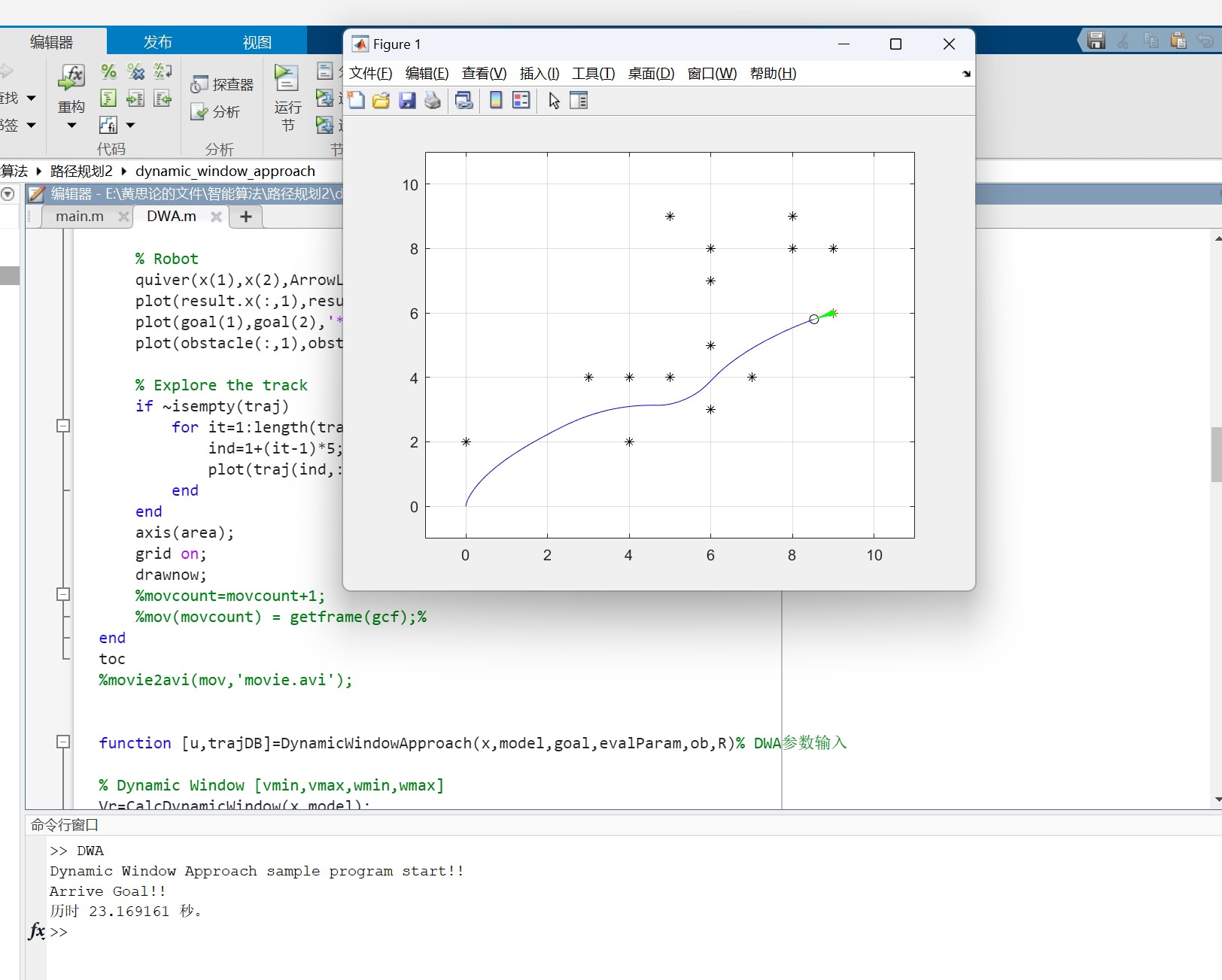
DWA(Dynamic Window Approach)算法主要用于动态环境下的局部路径规划。它通过考虑机器人当前的速度和加速度限制,在一个动态窗口内搜索最优的速度和转向角。
以下是简化的 DWA 代码示例(Python 伪代码):
def dwa_algorithm(robot_state, obstacles, goal):
# 获取机器人的速度限制和加速度限制
min_vel, max_vel, min_omega, max_omega = get_robot_limits(robot_state)
# 定义动态窗口
dynamic_window = [(v, omega) for v in np.arange(min_vel, max_vel, 0.1) for omega in np.arange(min_omega, max_omega, 0.1)]
best_score = -np.inf
best_vel = None
for vel, omega in dynamic_window:
# 预测下一时刻的状态
predicted_state = predict_state(robot_state, vel, omega)
# 计算代价函数,这里简单以到目标点的距离为例
score = -distance_to_goal(predicted_state, goal) - collision_cost(predicted_state, obstacles)
if score > best_score:
best_score = score
best_vel = (vel, omega)
return best_vel这段代码首先确定机器人的速度和转向角范围,形成动态窗口。然后对窗口内每个可能的速度和转向角组合进行状态预测,并根据到目标点的距离和碰撞代价计算得分,最终选择得分最高的组合作为下一时刻的控制指令。
A* 算法
A*算法是经典的全局路径规划算法,它结合了 Dijkstra 算法的广度优先搜索和贪心算法的最佳优先搜索思想。通过一个启发函数(比如曼哈顿距离或欧几里得距离)来引导搜索朝着目标前进。
import heapq
def a_star(start, goal, map):
open_set = []
heapq.heappush(open_set, (0, start))
came_from = {}
g_score = {node: float('inf') for node in map.nodes()}
g_score[start] = 0
f_score = {node: float('inf') for node in map.nodes()}
f_score[start] = heuristic(start, goal)
while open_set:
_, current = heapq.heappop(open_set)
if current == goal:
path = []
while current in came_from:
path.append(current)
current = came_from[current]
path.append(start)
path.reverse()
return path
for neighbor in map.neighbors(current):
tentative_g_score = g_score[current] + cost(current, neighbor)
if tentative_g_score < g_score[neighbor]:
came_from[neighbor] = current
g_score[neighbor] = tentative_g_score
f_score[neighbor] = tentative_g_score + heuristic(neighbor, goal)
if neighbor not in [i[1] for i in open_set]:
heapq.heappush(open_set, (f_score[neighbor], neighbor))
return None这里通过优先队列 openset 来存储待扩展节点,根据 fscore(gscore 加上启发函数值)来排序。gscore 表示从起点到当前节点的实际代价,heuristic 函数估计从当前节点到目标节点的代价。不断扩展节点,直到找到目标节点或者队列为空。
RRT 与 RRT* 算法
RRT(Rapidly - exploring Random Tree)算法是一种基于采样的路径规划算法,通过随机采样空间中的点,并逐步扩展搜索树,找到从起点到目标点的路径。
import random
class Node:
def __init__(self, state):
self.state = state
self.parent = None
def rrt(start, goal, map, max_iter):
root = Node(start)
tree = [root]
for i in range(max_iter):
sample = sample_free(map)
nearest = nearest_neighbor(tree, sample)
new_state = steer(nearest.state, sample)
if not collision(new_state, map):
new_node = Node(new_state)
new_node.parent = nearest
tree.append(new_node)
if distance(new_state, goal) < goal_threshold:
goal_node = Node(goal)
goal_node.parent = new_node
tree.append(goal_node)
path = []
current = goal_node
while current.parent:
path.append(current.state)
current = current.parent
path.append(start)
path.reverse()
return path
return None上述代码中,rrt 函数不断在地图的自由空间采样点 sample,找到树中距离采样点最近的节点 nearest,向采样点方向前进得到新节点 new_node,如果新节点不与障碍物碰撞则加入树中,直到找到接近目标点的路径。
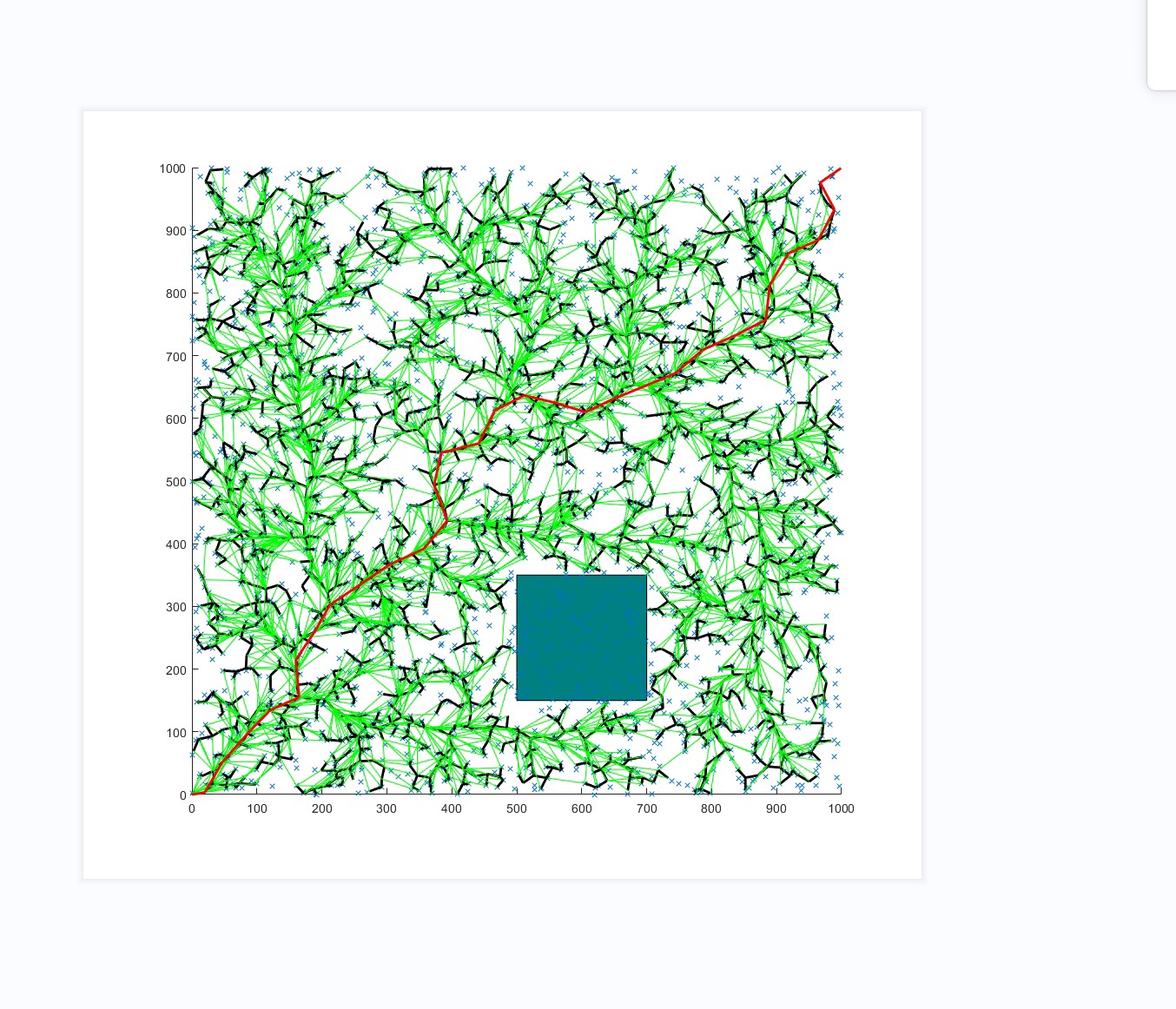
RRT* 是 RRT 的改进版本,它在扩展树的过程中,通过重新布线(rewiring)操作来优化路径,使得生成的路径更优。
def rrt_star(start, goal, map, max_iter):
root = Node(start)
tree = [root]
for i in range(max_iter):
sample = sample_free(map)
nearest = nearest_neighbor(tree, sample)
new_state = steer(nearest.state, sample)
if not collision(new_state, map):
new_node = Node(new_state)
new_node.parent = nearest
nearby = nearby_nodes(tree, new_state)
best_parent = select_best_parent(new_node, nearby)
new_node.parent = best_parent
tree.append(new_node)
rewire(new_node, nearby)
if distance(new_state, goal) < goal_threshold:
goal_node = Node(goal)
goal_node.parent = new_node
tree.append(goal_node)
path = []
current = goal_node
while current.parent:
path.append(current.state)
current = current.parent
path.append(start)
path.reverse()
return path
return None在 rrtstar 函数里,selectbest_parent 函数从附近节点中选择一个使新节点代价最小的节点作为父节点,rewire 函数则尝试优化附近节点的父节点,以降低整个树的代价。
DWA 与 RRT* 融合算法
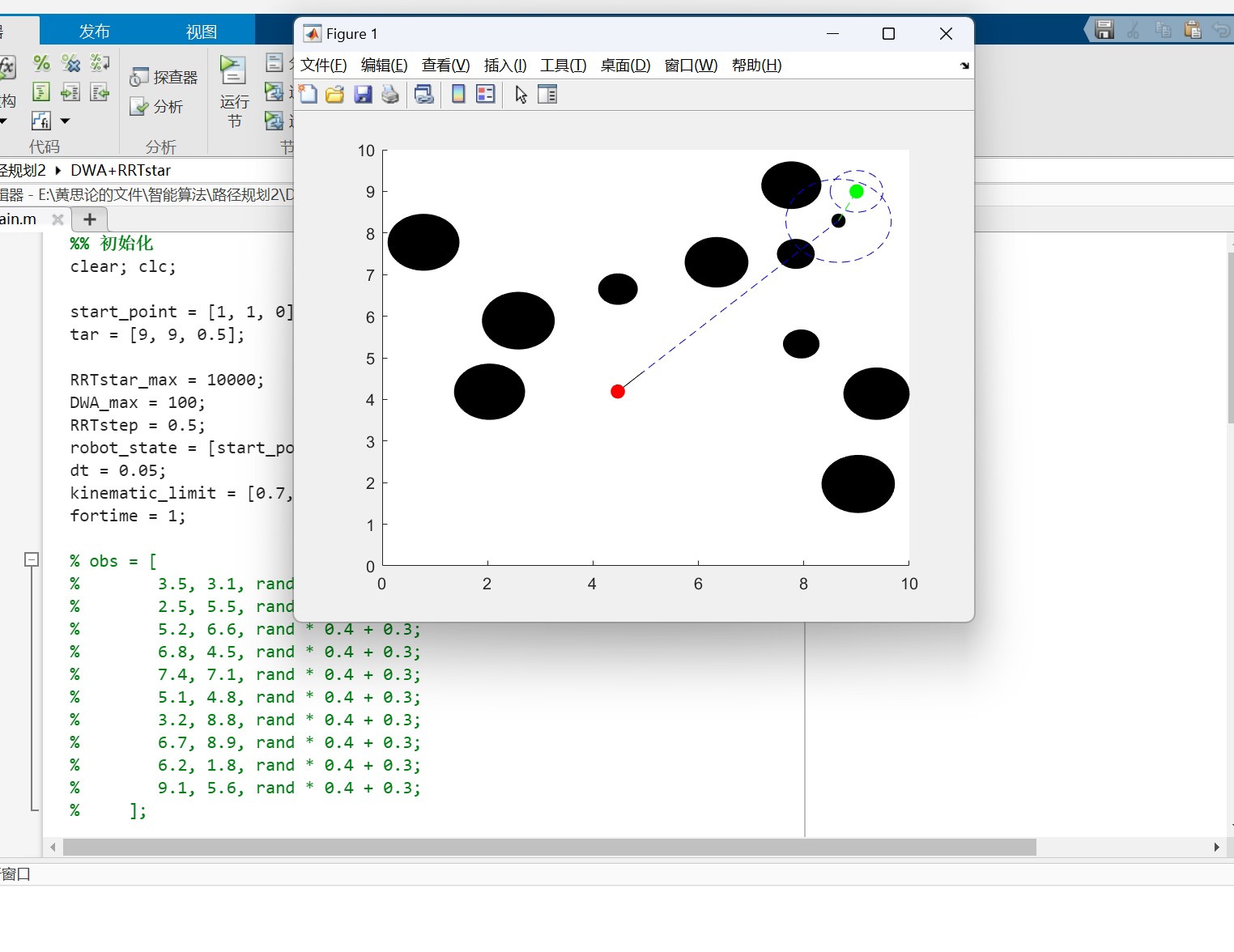
融合 DWA 和 RRT 算法可以结合全局路径规划和局部动态规划的优势。先使用 RRT 算法生成全局路径,然后在机器人沿着全局路径行进时,使用 DWA 算法进行局部路径调整,以应对动态障碍物。
def dwa_rrt_star(start, goal, map):
global_path = rrt_star(start, goal, map, max_iter=1000)
if not global_path:
return None
robot_state = start
for i in range(len(global_path) - 1):
sub_goal = global_path[i + 1]
while distance(robot_state, sub_goal) > sub_goal_threshold:
vel, omega = dwa_algorithm(robot_state, get_obstacles(map), sub_goal)
robot_state = update_state(robot_state, vel, omega)
return global_path这段代码先用 rrtstar 生成全局路径,然后机器人沿着全局路径分段前进,每段使用 dwaalgorithm 调整路径,以适应动态环境。
自定义地图
为了测试这些算法,我们可以自定义地图。以简单的二维地图为例,地图可以用二维数组表示,0 表示自由空间,1 表示障碍物。
map = [
[0, 0, 0, 0, 0],
[0, 1, 0, 1, 0],
[0, 0, 0, 0, 0],
[0, 1, 1, 1, 0],
[0, 0, 0, 1, 0]
]在实际应用中,地图可以从文件读取或者通过传感器实时生成。
以上这些算法各有优劣,在实际项目中,我们可以根据具体场景选择合适的算法或者算法融合方案。希望这篇博文能帮助你对路径规划算法有更深入的了解。运行效果就像我们看到的图示那样,不同算法在自定义地图上各展神通,为机器人规划出一条条或全局最优、或适应动态环境的路径。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐
 6
6 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)