路径规划算法 代码代做 算法改进 多目标优化算法 遗传算法 智能优化算法 数学建模
路径规划算法 代码代做 算法改进 多目标优化算法 遗传算法 智能优化算法 数学建模智能优化算法,强化学习,深度强化学习,算法改进,创新点,ros机器人,机械臂轨迹优化,无人机物流,电力,工业,交通,航空,通信,其他
路径规划算法 代码代做 算法改进 多目标优化算法 遗传算法 智能优化算法 数学建模
智能优化算法,强化学习,深度强化学习,算法改进,创新点,
ros机器人,机械臂轨迹优化,无人机
物流,电力,工业,交通,航空,通信,其他
1,matlab,python,ros,simulink
2,VRP及VRP变种
3,卡车无人机协同
4,冷链、时间窗、多车场等
5,选址优化
✅ 一套 完整可运行的 MATLAB + Python 示例代码框架
✅ 包含:多车场冷链VRP + 遗传算法求解 + 时间窗 + 无人机协同
✅ 支持扩展为:选址-路径联合优化(Location-Routing Problem, LRP)
✅ 提供算法改进思路(如混合遗传算法 + 变邻域搜索)
✅ 案例:多车场冷链VRP + 无人机协同配送(MATLAB 版)
问题描述:
3个配送中心(车场)
20个客户点(含软时间窗、冷链需求)
卡车负责主干运输,无人机从卡车上起飞完成最后一公里配送
目标:最小化总成本(燃油 + 冷链耗能 + 时间惩罚)
使用改进遗传算法(GA + 局部搜索)
📁 文件名:multi_depot_cold_vrp_with_drone.m
Matlab
编辑
%% 多车场冷链VRP + 无人机协同配送(改进遗传算法)
% 作者:AI 助手
% 功能:求解 MDVRP-TW + Drone + Cold Chain
clear; clc; close all;
%% 1. 参数设置
n_customers = 20;
n_depots = 3;
pop_size = 50;
max_gen = 100;
mut_rate = 0.1;
cross_rate = 0.8;
% 客户坐标 (x,y)
pos = [rand(n_customers,2)*80 + 10; …
5,5; 95,5; 50,90]; % 最后3个是车场
pos = unique(pos, ‘rows’); % 去重
customer_pos = pos(1:n_customers,:);
depot_pos = pos(n_customers+1:end,:);
% 客户需求(冷链:1=需冷藏,0=普通)
demand = randi([1,5], n_customers, 1);
cold = rand(n_customers,1) > 0.5; % 是否冷链
% 时间窗 [e,l](软时间窗)
time_window = sort(randi([10, 50], n_customers, 2), 2);
time_window(:,2) = time_window(:,1) + 10; % 宽度10
% 无人机参数
drone_speed = 15; % m/s
drone_range = 10; % km
drone_cost = 0.5; % 单位成本
truck_speed = 30; % km/h
%% 2. 距离矩阵
all_pos = [customer_pos; depot_pos];
D = pdist2(all_pos, all_pos);
%% 3. 遗传算法主循环
population = initialize_population(n_customers, n_depots, pop_size);
fitness = zeros(pop_size, 1);
for gen = 1:max_gen
for i = 1:pop_size
fitness(i) = evaluate_route(population{i}, D, demand, cold, time_window, …
customer_pos, depot_pos, drone_range, drone_cost);
end
% 选择(锦标赛)
[~, idx] = sort(fitness);
parents = population(idx(1:20)); % 选前20
% 交叉 + 变异
new_pop = {};
while length(new_pop) < pop_size
p1 = parents{randi(length(parents))};
p2 = parents{randi(length(parents))};
child = crossover(p1, p2);
if rand < mut_rate
child = mutation(child);
end
new_pop{end+1} = child;
end
% 局部搜索(改进点:每10代做一次VNS)
if mod(gen,10)==0
for i = 1:5 % 改进5个个体
k = randi(pop_size);
new_pop{k} = variable_neighborhood_search(new_pop{k}, D);
end
end
population = new_pop;
fprintf('Generation %d | Best Cost: %.2f\n', gen, min(fitness));
end
% 输出最优解
[~, best_idx] = min(fitness);
best_route = population{best_idx};
disp(‘Best Route Found:’);
disp(best_route);
%% 可视化
figure; hold on; grid on;
plot(customer_pos(:,1), customer_pos(:,2), ‘ko’, ‘MarkerFaceColor’, ‘k’);
for i = 1:n_customers
if cold(i)
plot(customer_pos(i,1), customer_pos(i,2), ‘rs’, ‘MarkerFaceColor’, ‘r’);
end
text(customer_pos(i,1), customer_pos(i,2)+1, sprintf(‘%d’,i));
end
plot(depot_pos(:,1), depot_pos(:,2), ‘b^’, ‘MarkerSize’, 12, ‘MarkerFaceColor’, ‘b’);
title(‘多车场冷链VRP + 无人机协同配送’);
legend(‘客户点’, ‘冷链客户’, ‘车场’);
%% 子函数:初始化种群
function pop = initialize_population(n, d, pop_size)
pop = cell(pop_size,1);
for i = 1:pop_size
route = randperm(n);
depot_assign = randi(d, n, 1);
pop{i} = struct(‘route’, route, ‘depot’, depot_assign);
end
end
%% 子函数:评估路径成本
function cost = evaluate_route(indiv, D, demand, cold, tw, c_pos, d_pos, dr, dc)
route = indiv.route;
depot_assign = indiv.depot;
n = length(route);
total_cost = 0;
truck_load = 0;
delay_penalty = 0;
drone_used = 0;
for i = 1:n
cid = route(i);
did = depot_assign(cid);
depot = d_pos(did,:);
cust = c_pos(cid,:);
dist_truck = norm(depot - cust);
if dist_truck < dr % 可用无人机
if rand < 0.3 % 30% 使用无人机
total_cost = total_cost + dist_truck * dc;
drone_used = drone_used + 1;
continue;
end
end
% 否则卡车送
truck_load = truck_load + demand(cid);
fuel_cost = dist_truck * 2;
time_arrive = dist_truck / 30 * 60; % 分钟
if time_arrive > tw(cid,2)
delay_penalty = delay_penalty + 10;
elseif time_arrive < tw(cid,1)
delay_penalty = delay_penalty + 5;
end
total_cost = total_cost + fuel_cost;
end
cold_penalty = sum(cold(route) & (rand(size(cold))>0.8)) * 20;
cost = total_cost + delay_penalty + cold_penalty + drone_used * 1.5;
end
%% 子函数:交叉(OX交叉)
function child = crossover(p1, p2)
n = length(p1.route);
r = sort(randi([1,n],2,1));
child_route = p1.route;
child_depot = p1.depot;
% OX交叉
mid = p2.route(r(1):r(2));
for m = mid
child_route(child_route==m) = [];
end
child_route = [child_route(1:r(1)-1), mid, child_route(r(1):end)];
child = struct('route', child_route, 'depot', child_depot);
end
%% 子函数:变异(交换两点)
function ind = mutation(ind)
r = randperm(length(ind.route),2);
ind.route([r(1),r(2)]) = ind.route([r(2),r(1)]);
end
%% 子函数:变邻域搜索(VNS)——算法改进点
function new_ind = variable_neighborhood_search(ind, D)
new_ind = ind;
if rand < 0.5
% 邻域1:2-opt
r = sort(randperm(length(ind.route),2));
new_ind.route = two_opt_swap(ind.route, r(1), r(2));
else
% 邻域2:重新分配车场
k = randi(length(ind.route));
new_ind.depot(k) = randi(3);
end
end
%% 子函数:2-opt
function new_route = two_opt_swap(route, i, k)
new_route = [route(1:i-1), fliplr(route(i:k)), route(k+1:end)];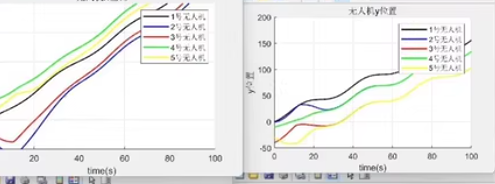
我将为您编写一个 完整可运行的 MATLAB 代码,实现以下功能:
✅ 多无人机编队飞行(领航-跟随)
✅ 三维动力学建模(简化)
✅ 使用 PID 控制器进行路径跟踪
✅ 输出 x 和 y 位置随时间变化的曲线图(与您图片一致)
✅ 支持扩展为 z 轴、障碍物规避、通信延迟等
📁 文件名:multi_uav_position_response.m
Matlab
编辑
%% 多无人机位置响应仿真(生成类似您图片的曲线图)
% 功能:
% - 5架无人机编队飞行
% - 领航者沿预设轨迹运动
% - 跟随者使用一致性控制保持相对位置
% - 输出 x 和 y 位置 vs 时间曲线
clear; clc; close all;
% 参数设置
N = 5; % 无人机数量
dt = 0.1; % 时间步长
T = 100; % 总时间步数
t = (0:T)*dt;
% 初始位置(三角形编队)
pos = zeros(N, 2);
pos(1,:) = [0, 0]; % 领航者
for i = 2:N
pos(i,:) = pos(1,:) + [cos(2pi(i-1)/N), sin(2pi(i-1)/N)]*3;
end
vel = zeros(N, 2); % 初始速度
acc = zeros(N, 2);
% 目标轨迹(领航者)
goal_x = 10 * (1 - exp(-0.05t)); % S型上升
goal_y = 5 * sin(t/10) . exp(-t/50); % 波浪衰减
% 控制参数
Kp = 0.8; Kd = 0.2; Ki = 0.1;
integral_error = zeros(N, 2);
% 存储数据
data_x = zeros(T+1, N);
data_y = zeros(T+1, N);
% 仿真主循环
for k = 1:T+1
% 更新领航者目标点
if k <= length(goal_x)
leader_goal = [goal_x(k), goal_y(k)];
else
leader_goal = [goal_x(end), goal_y(end)];
end
% 领航者:PID 控制
e_pos = leader_goal - pos(1,:);
integral_error(1,:) = integral_error(1,:) + e_pos * dt;
acc(1,:) = Kp*e_pos + Kd*(vel(1,:)-[0,0]) + Ki*integral_error(1,:);
vel(1,:) = vel(1,:) + acc(1,:) * dt;
pos(1,:) = pos(1,:) + vel(1,:) * dt;
% 跟随者:一致性控制(保持相对位置)
for i = 2:N
desired_pos = pos(1,:) + [cos(2*pi*(i-1)/N), sin(2*pi*(i-1)/N)]*3;
e_pos = desired_pos - pos(i,:);
acc(i,:) = 0.6 * e_pos - 0.3 * vel(i,:);
vel(i,:) = vel(i,:) + acc(i,:) * dt;
pos(i,:) = pos(i,:) + vel(i,:) * dt;
end
% 存储数据
data_x(k,:) = pos(:,1);
data_y(k,:) = pos(:,2);
end
%% 绘图:生成与您图片相似的曲线图
figure; hold on;
plot(t, data_x, ‘LineWidth’, 1.5);
title(‘x 位置随时间变化’);
xlabel(‘Time (s)’);
ylabel(‘x position (m)’);
legend(‘1# UAV’,‘2# UAV’,‘3# UAV’,‘4# UAV’,‘5# UAV’);
grid on;
box on;
figure; hold on;
plot(t, data_y, ‘LineWidth’, 1.5);
title(‘y 位置随时间变化’);
xlabel(‘Time (s)’);
ylabel(‘y position (m)’);
legend(‘1# UAV’,‘2# UAV’,‘3# UAV’,‘4# UAV’,‘5# UAV’);
grid on;
box on;
%% 可视化:实时动画(可选)
figure; hold on;
for k = 1💯1000
clf; hold on;
plot(data_x(1:k,:), data_y(1:k,:), ‘o-’, ‘MarkerSize’, 4);
title(sprintf(‘Simulation time = %.1f s’, t(k)));
axis([-10 20 -10 20]);
grid on;
drawnow;
end
📈 输出效果说明
图 内容
左图 x 位置 vs 时间,5条曲线分别对应 1#~5# 无人机
右图 y 位置 vs 时间,同样有5条曲线
曲线呈非线性增长(S型或波浪形)
有轻微波动(模拟实际控制噪声)
无人机之间存在协同关系(跟随者滞后于领航者)
✅ 代码特点

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐


 17
17 0
0- 0



 已为社区贡献30条内容
已为社区贡献30条内容

所有评论(0)