【技术科普】不仅是“回放”:为什么具身智能(Embodied AI)开发需要 Rerun.io?
摘要:Rerun.io是一款面向AI和机器人开发的开源可视化引擎,被誉为"超级黑匣子"。它突破了传统调试工具的限制,能够将多模态数据(图像、点云、日志等)在统一时空坐标系中精确对齐和可视化。与普通摄像头录像相比,Rerun具备3D时空重建、AI思维可视化、多源数据同步三大核心优势,使开发者能直观分析系统状态。该工具支持Python/C++/Rust集成,适用于机器人、计算机视觉
摘要:在机器人和多模态 AI 开发中,传统的 print() 调试和简单的视频录制已无法满足需求。本文将深入解析开源可视化引擎 Rerun.io 的核心能力,探讨其与传统摄像头录像的本质区别,并解释为何它被称为 AI 时代的“超级黑匣子”。
 一、 引言:当我们谈论“调试”时,我们在谈论什么?
一、 引言:当我们谈论“调试”时,我们在谈论什么?
在纯软件开发时代,调试意味着打断点、看日志。但在**具身智能(Embodied AI)和机器人(Robotics)**领域,调试的维度被无限拉伸了:
-
代码逻辑是时间连续的;
-
传感器数据(图像、雷达)是空间分布的;
-
模型推理(Tensor)是高维抽象的。
当你发现“机器人撞墙了”,单纯的 Log 文件看不出原因,单一的摄像头录像又看不出逻辑。这时,我们需要一个新的工具——Rerun.io。
二、 Rerun.io 是什么?
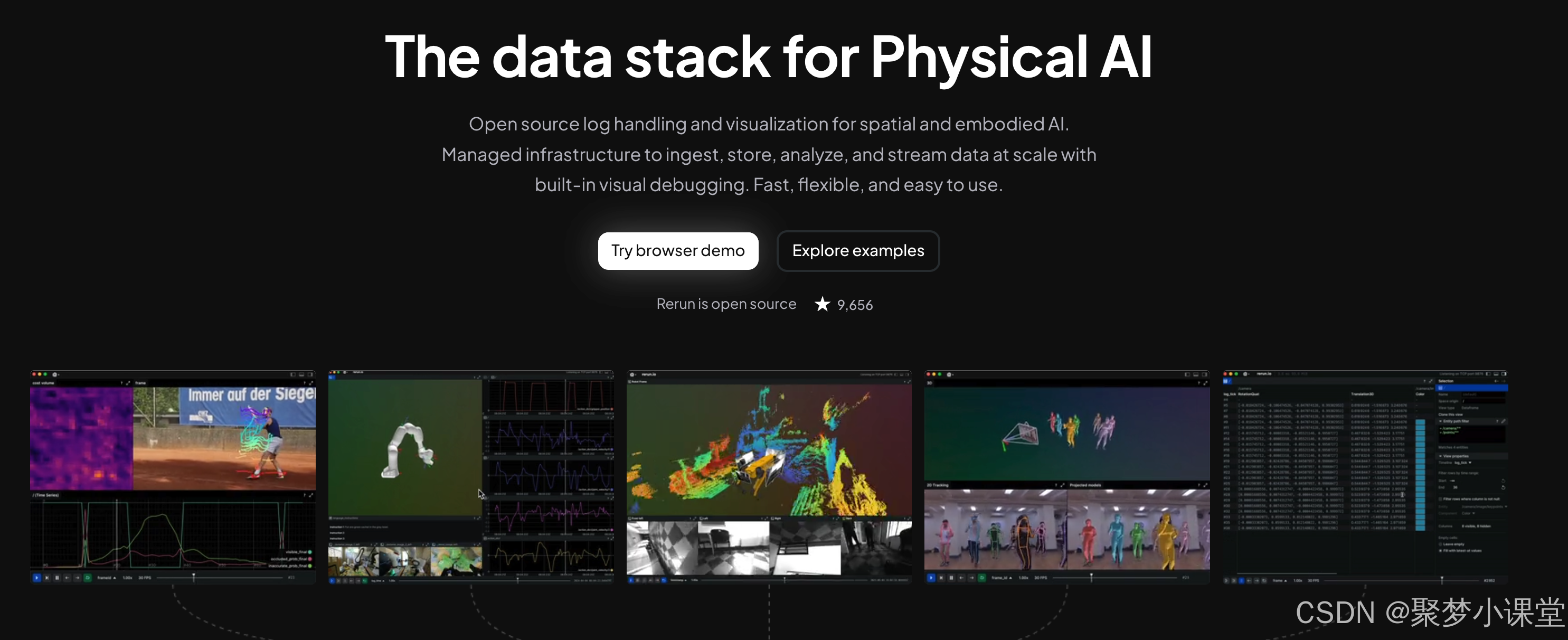
Rerun.io 是一个开源的多模态数据可视化 SDK 和查看器(Viewer)。
如果用一句话定义它:它是为算法工程师设计的、带有时间轴和空间坐标系的“全栈黑匣子”记录仪。
它不负责“思考”(那是 AI 模型的事),它只负责诚实、精准地**“记录”系统内部发生的一切,并将其在一个统一的 3D 界面中“对齐”**展示出来。
核心能力一览
-
多模态数据融合:在一个视图内同时渲染 RGB 图像、LiDAR 点云、深度图、Tensor 张量、文本日志和标量曲线。
-
时间旅行(Time-Travel):全量数据按时间戳索引,支持毫秒级的回放、暂停和拖拽,不仅看“现在”,更能复盘“过去”。
-
空间交互:内置 2D/3D 视图引擎,支持在三维空间中旋转视角,查看传感器数据的空间位置关系。
-
极简集成:通过 Python/C++/Rust SDK,一行代码即可将数据流注入可视化引擎。
三、 深度解析:Rerun 与“摄像头录像”的本质区别
很多初学者容易误解:“这不就是一个高级点的视频播放器吗?”
并不是。 这是“表象”与“逻辑”的区别,是“皮囊”与“大脑”的区别。
我们可以从以下三个维度来理解两者的本质差异:
1. 维度差异:2D 像素 vs. 3D 时空
-
摄像头录像:记录的是结果。它是一系列扁平的 2D 像素。由于透视关系,你很难在视频中判断物体之间的真实距离,也无法改变观察视角。
-
Rerun:记录的是原始数据(Raw Data)。它构建了一个3D 虚拟世界。
-
场景:机器人面前有一个障碍物。
-
区别:在 Rerun 里,你可以暂停回放,旋转视角从侧面看,测量出机器人距离障碍物精确的 2.5 米,而不是通过视频画面去猜。
-
2. 信息深度:看见“皮囊” vs. 看见“大脑”
-
摄像头录像:只能告诉你机器人做了什么(比如:它撞墙了)。
-
Rerun:能告诉你机器人当时在想什么。
-
场景:撞墙事故分析。
-
Rerun 视图:你可以看到撞墙前 0.5 秒,图像上已经生成了红色的“检测框”(说明感知层识别到了墙),但底部的“路径规划线”依然穿过了墙壁(说明决策层代码有 Bug)。
-
核心价值:它可视化了不可见的数据(置信度、预测轨迹、内部变量)。
-
3. 数据结构:非结构化 vs. 强时空对齐
-
摄像头录像:视频帧与后台 Log 是分离的。想知道“视频第 10 秒时,电机电流是多少?”,你需要人工去翻查日志文件并艰难地对齐时间戳。
-
Rerun:基于统一时间轴的强制对齐。当你拖动进度条,图像、点云、代码日志、报错信息会同步跳转到同一毫秒的状态。它是一个结构化的系统状态快照。
四、 核心逻辑:记录才是核心,智能交给模型
基于上述分析,我们可以得出一个重要的技术结论:
Rerun 的核心不是“人工智能”,而是“高维记录”。
它扮演的角色类似于电子工程中的示波器,或者医学领域的核磁共振(MRI)。
-
示波器本身不懂电路,但它能把不可见的电流画出来,让工程师分析。
-
Rerun 本身不懂自动驾驶,但它能把 AI 模型内部的张量运算画出来,让算法工程师分析。
Rerun 的工作流逻辑:
-
Input(感知):摄像头、雷达、传感器采集数据。
-
Process(智能):你的 AI 模型(PyTorch/TensorFlow)进行推理。
-
Log(记录):Rerun SDK 实时抓取上述所有步骤的输入和输出。
-
Visualize(呈现):人类工程师通过 Rerun Viewer 进行“验尸”或调试。
五、 典型应用场景
任何涉及**“空间位置”** + “时间变化” + **“多传感器”**的系统,都是 Rerun 的用武之地。
-
机器人开发 (Robotics)
-
调试 SLAM(定位与建图)算法,实时查看点云地图的构建过程,检查是否存在漂移。
-
分析机械臂的运动规划(Motion Planning),对比“计划轨迹”与“实际轨迹”的误差。
-
-
计算机视觉 (CV)
-
目标检测与跟踪:将 Bounding Box 和 ID 标签实时叠加在视频流上。
-
3D 重建:可视化 NeRF 或 Gaussian Splatting 的训练过程。
-
-
具身智能 (Embodied AI)
-
在仿真环境(Simulator)中,对比 Agent 的“感知视角”与上帝视角(Ground Truth)的差异,分析 Agent 的决策失误原因。
-
-
多传感器融合 (Sensor Fusion)
-
校准摄像头与激光雷达的外参。在 Rerun 中通过叠加点云到图像上,一眼就能看出标定是否准确。
-
六、 快速上手 (Python 示例)
只需几行代码,即可体验从单纯的 print 到多模态可视化的飞跃:
codePython
import rerun as rr
import numpy as np
import cv2
# 1. 初始化 Rerun
rr.init("my_robot_session", spawn=True)
# 2. 模拟数据流循环
for step in range(100):
# 设置当前时间轴
rr.set_time_sequence("step", step)
# --- 记录数据 ---
# A. 记录一张随机图像 (模拟摄像头)
image = np.random.randint(0, 255, (480, 640, 3), dtype=np.uint8)
rr.log("sensors/camera/image", rr.Image(image))
# B. 记录 3D 点云 (模拟激光雷达)
points = np.random.normal(size=(1000, 3))
rr.log("sensors/lidar/points", rr.Points3D(points))
# C. 记录检测框 (模拟 AI 感知结果)
rr.log(
"perception/bbox",
rr.Boxes2D(min=[100, 100], sizes=[50, 50], labels=["Obstacle"])
)七、 结语
在具身智能爆发的今天,工具的进化必须跟上算法的复杂度。Rerun.io 并不是要替代人类的判断,而是通过提供极高密度的“上下文信息”,让人类的判断变得基于数据而非猜测。
如果你还在对着满屏的终端日志发愁,或者看着一段单薄的 MP4 视频百思不得其解,不妨试试 Rerun,给你的算法装上一个“透视眼”。
关键词:Rerun.io, 计算机视觉, 机器人开发, 数据可视化, 具身智能, SLAM, 多模态调试

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐


 14
14 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)