高等机器人学(七):刚体的构形和速度旋量(Twist的几何表达 - Screw Motion)
第一部分:核心概念回顾与串联
-
刚体构形: 描述刚体在空间中的位置和朝向,由位置向量和旋转矩阵定义。
-
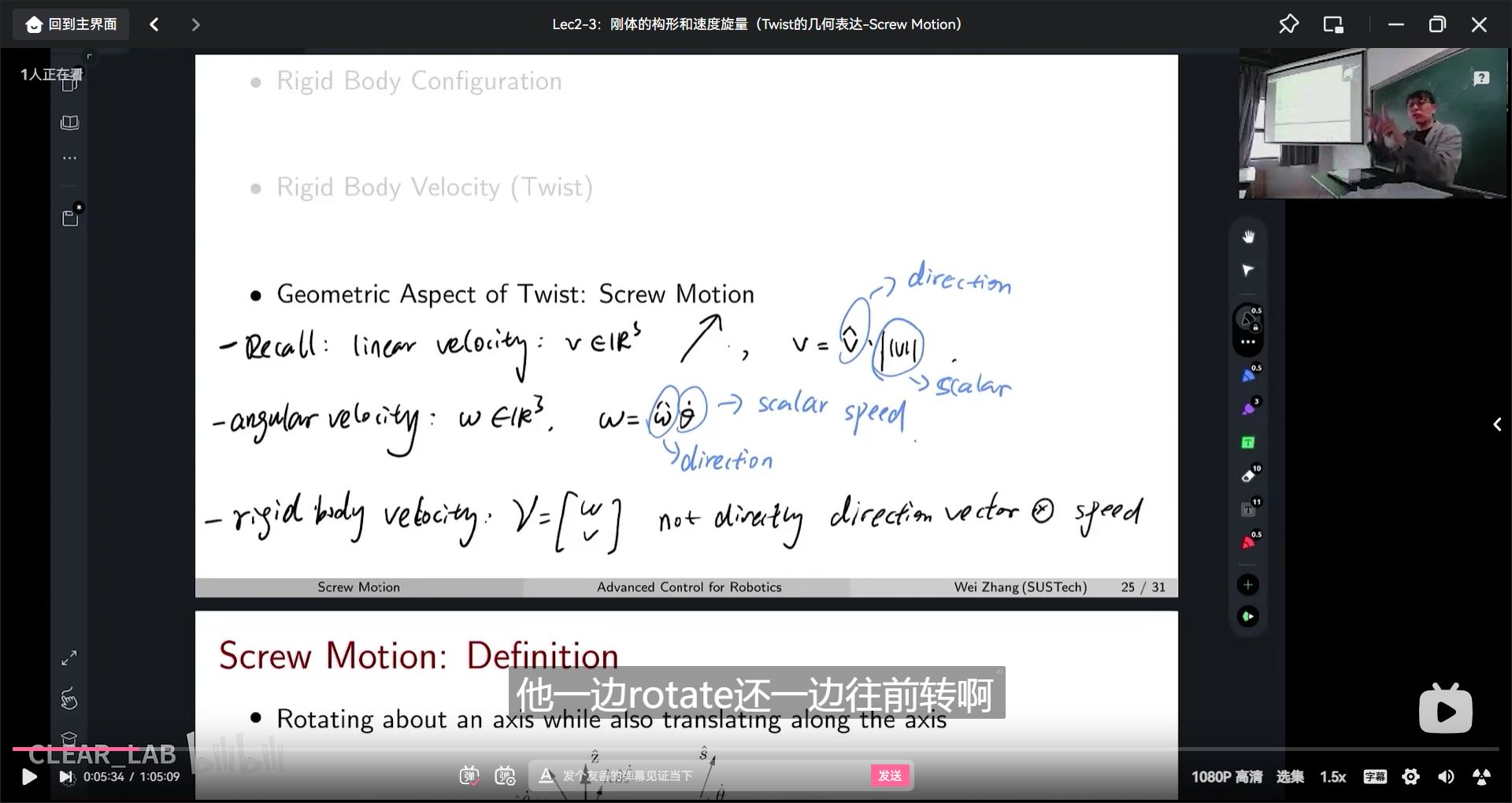
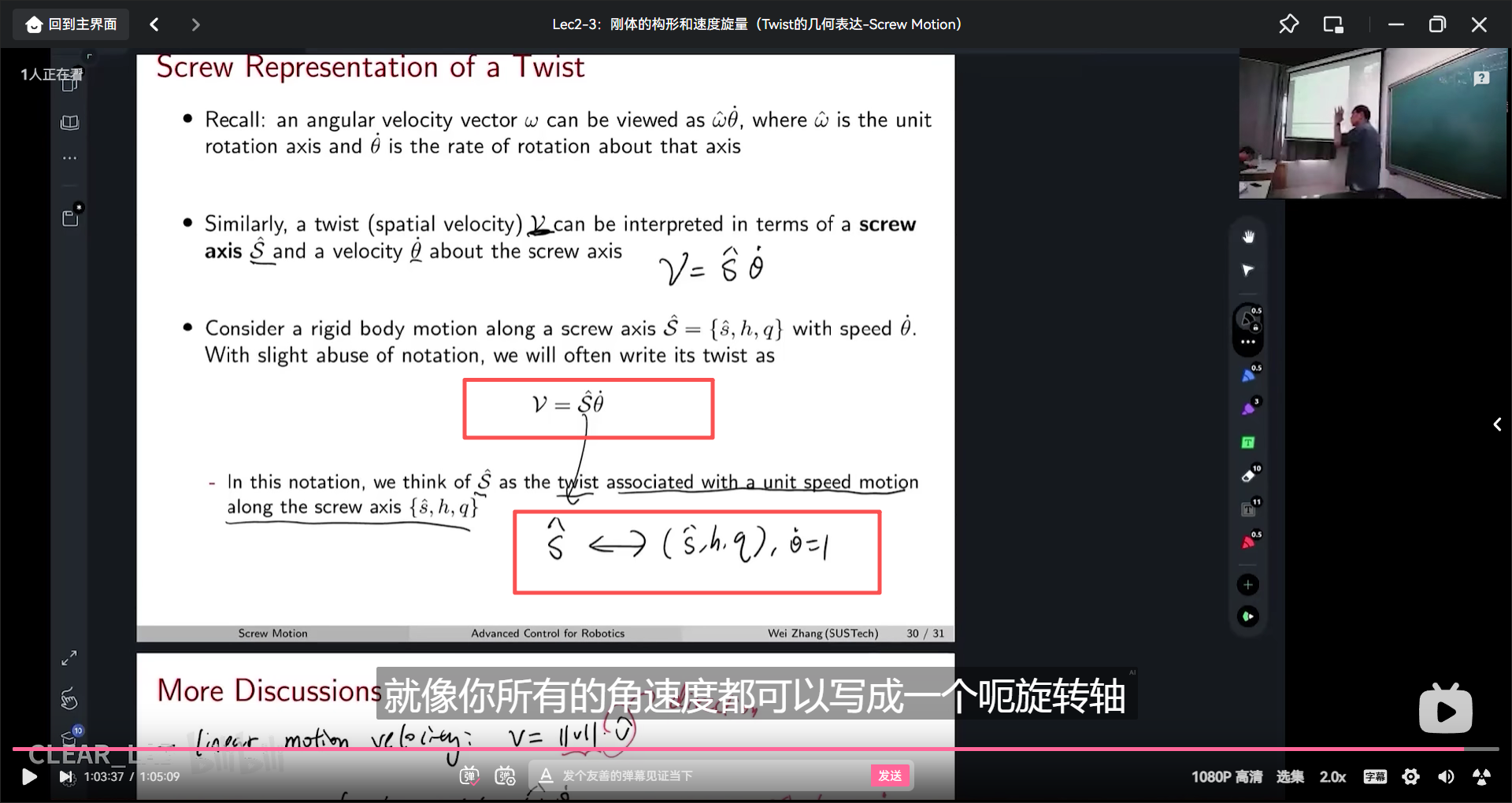
刚体速度: 即旋量,是一个六维向量
Twist = (ω, v),完整描述了刚体的瞬时运动(包括移动和转动)。 -
旋量的几何表达: 本页幻灯片的重点,即螺旋运动。它揭示了旋量最深刻的几何本质
1. 旋量的两种特殊形式
螺旋运动理论完美地统一了刚体的两种基本运动:
-
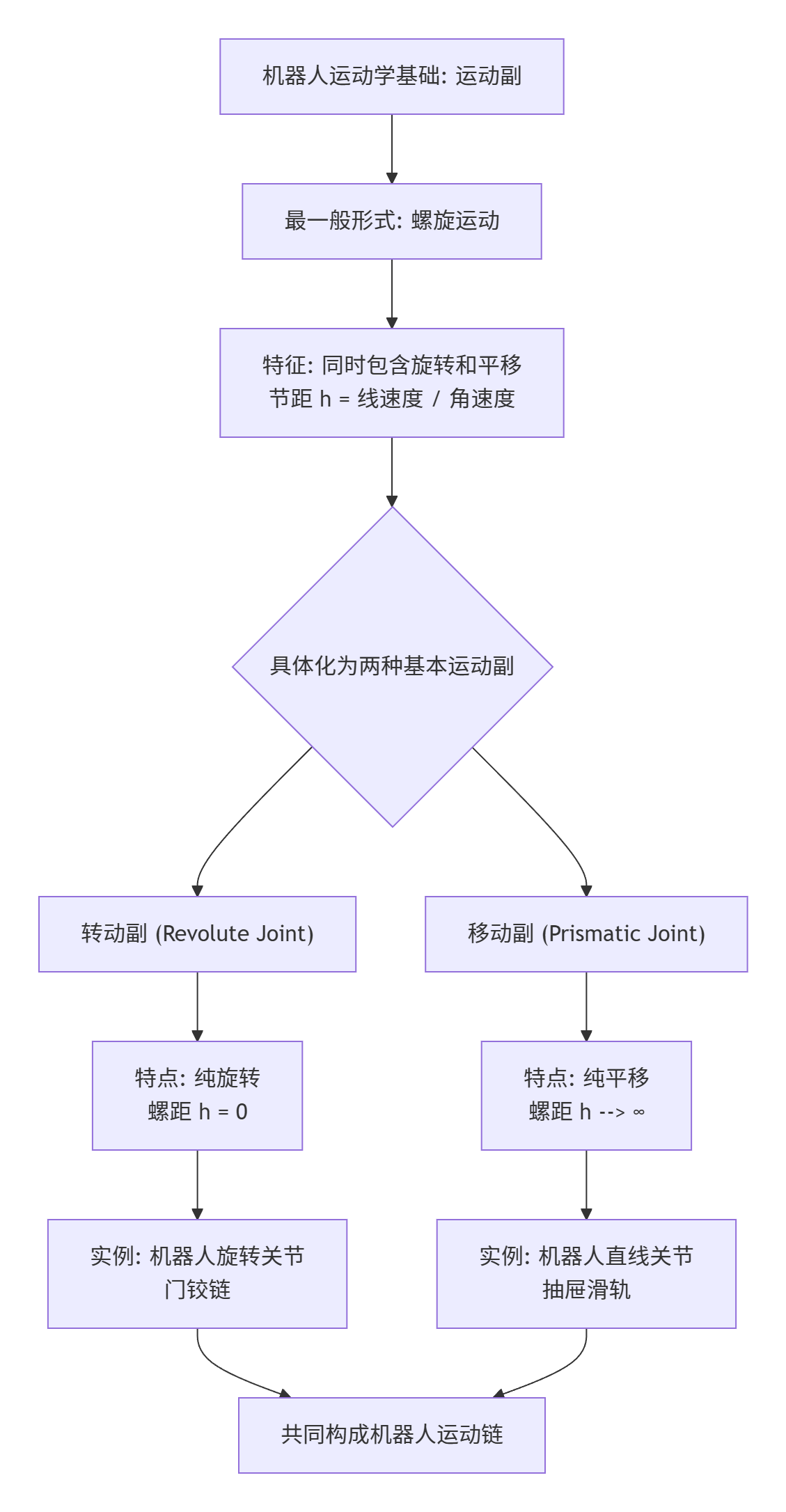
纯旋转: 当沿轴线的平移速度
v = 0时,节距p = 0。运动退化为绕一根固定轴的纯旋转。例如,门绕门轴的转动。 -
纯平移: 当旋转角速度
ω = 0时,节距p趋于无穷大。这意味着“旋转一周所需要平移的距离为无穷大”,即运动没有旋转,只有平移。此时,旋量退化为(0, v)。
2. 在机器人学中的应用
螺旋运动理论是现代机器人运动学的基石,主要体现在:
-
运动链描述: 机器人的每个关节(转动副或移动副)都可以看作一个产生螺旋运动的关节。转动副产生纯旋转(节距为0),移动副产生纯平移(节距为无穷大)。
-
指数积公式: 机器人的整体运动可以表示为各个关节螺旋运动的指数乘积。这是机器人正运动学分析的强大数学工具。
-
运动规划: 在规划机器人末端执行器的路径时,可以规划一条光滑的螺旋运动轨迹,而不是独立的旋转和平移,从而使运动更自然、高效。
几何图像——螺旋运动。
-
核心思想: 任何刚体的瞬时运动,都可以看作一个螺旋运动,即绕一根轴旋转并沿该轴平移。
-
数学工具: 旋量 是描述该螺旋运动的数学量,
ω决定轴方向和转速,v决定平移速度。 -
关键参数: 节距
p = v / ω量化了运动的“螺旋”程度。 -
重要性: 此理论是连接机器人机构学、运动学、动力学和控制理论的桥梁。
第一部分:螺旋运动的定义
幻灯片开篇明义,给出了螺旋运动的直观定义:
-
原文:
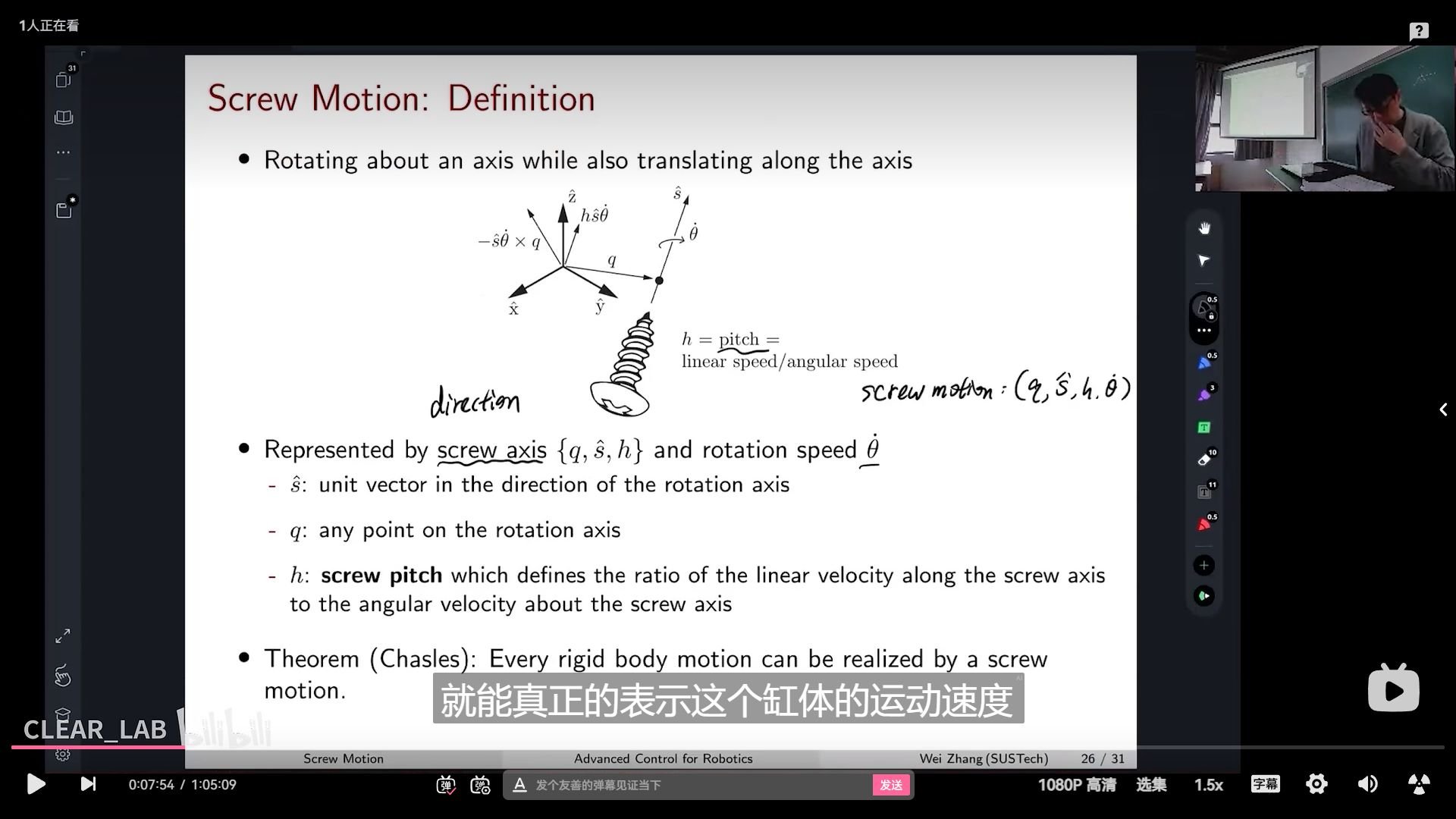
Rotating about an axis while also translating along the axis -
中文: 绕一根轴旋转,同时沿该轴平移。
-
实例: 最经典的例子就是拧螺丝。螺丝刀驱动螺丝绕其中心轴旋转,同时螺丝沿着这个轴向木头内部前进。这个复合运动就是一个螺旋运动。
第二部分:螺旋运动的数学表示(核心参数)
1. 螺旋轴的方向 (ŝ)--单位向量
-
ŝ: 一个单位向量,指明了螺旋轴在空间中的方向。 -
解释: 这个向量定义了刚体旋转的轴线方向以及平移的方向。它是一个方向矢量,长度为1。
2. 螺旋轴的位置 (q)--位置向量
-
q: 螺旋轴上任意一点的位置向量(用于确定轴的空间位置 -
解释: 仅凭方向矢量
ŝ只能确定一根无限长直线的方向,无法确定其具体位置。点q的作用就是“固定”这根轴在空间中的位置。理论上,可以选择轴上的任意一点。
3. 螺距 (h)--比例关系 标量
-
h: 螺距。这是螺旋运动的一个关键参数,它定义了旋转和平移的比例关系。 -
定义公式:
h = linear speed / angular speed(线速度 / 角速度)。 -
物理意义:
-
它表示刚体绕轴旋转单位角度时,沿该轴所平移的距离。
-
更常见的解释是:旋转一整圈(360° 或 2π 弧度)时,沿轴前进的距离。例如,标准螺丝的螺距就是螺纹的间距。
-
4. 运动速度 (θ̇)--绕螺旋轴的角速度大小 标量
-
θ̇(theta dot): 刚体绕螺旋轴旋转的角速度。 -
作用: 以上三个参数
(q, ŝ, h)定义了运动的几何形态(即“如何动”)。而θ̇则定义了运动的快慢(即“动多快”)。一旦给定了角速度,沿轴的线速度也就确定了:v = h * θ̇
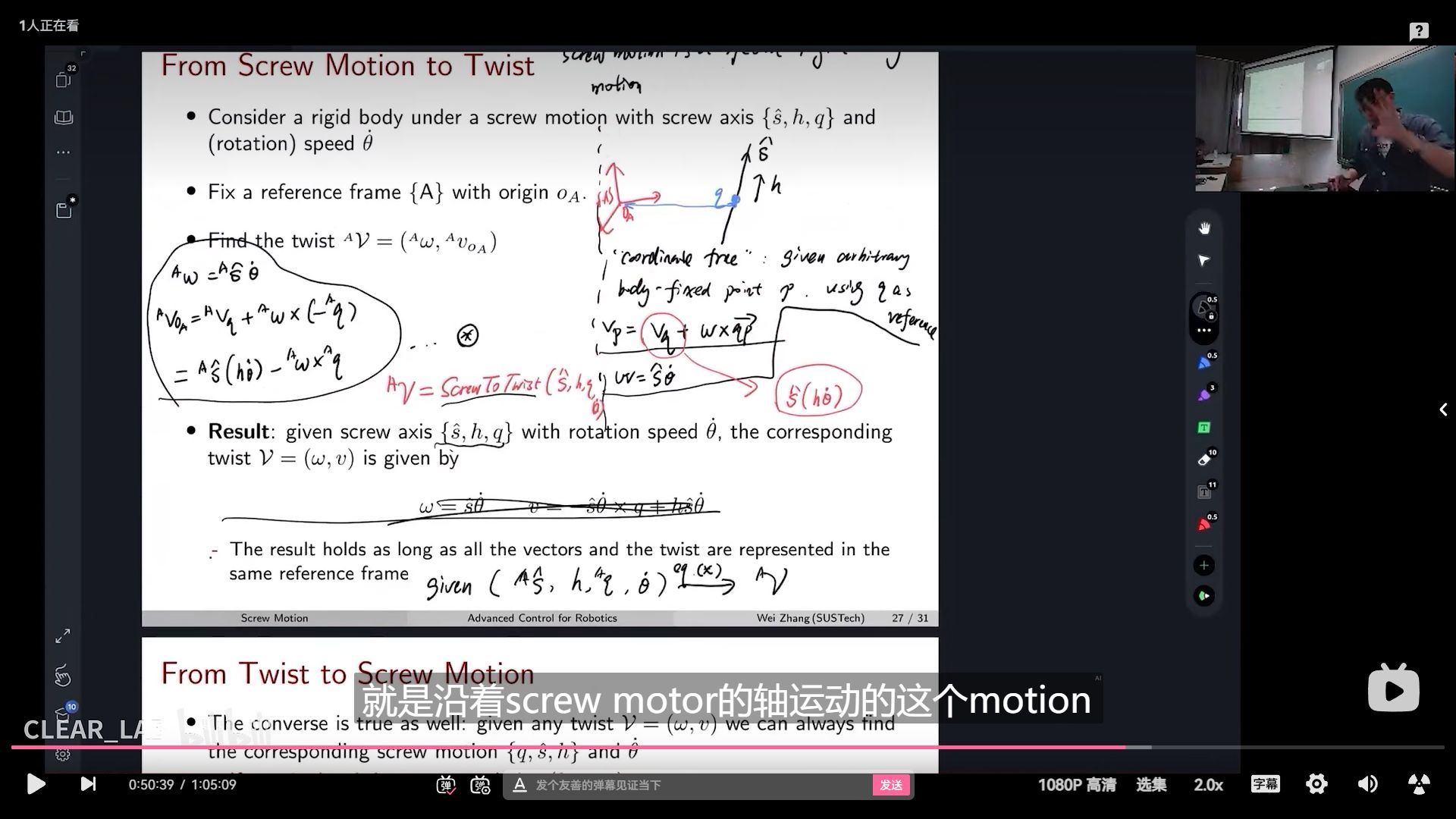
这些参数(ŝ, q, h, θ̇)的矢量表示,必须针对一个明确的、统一的参考坐标系而言。
这个参考系通常被称为空间坐标系或固定参考系(例如,机器人学中的世界坐标系 {W}或基坐标系 {B})
第三部分:沙勒定理(Theorem (Chasles))
幻灯片提到了一个极其重要的定理:
-
原文:
Every rigid body motion can be realized by a screw motion. -
中文: 任何刚体运动都可以通过一个螺旋运动来实现。
-
深刻含义:
-
这个定理意味着,无论一个刚体的运动看起来多么复杂(比如机器人的手臂在空中挥舞),在任何一个瞬时时刻,它的运动都可以被等价为绕某一根特定轴线的螺旋运动。
-
这根轴就是瞬时螺旋轴。刚体在该瞬时的运动,就是绕此轴以某个角速度
θ̇旋转,并沿此轴以由螺距h决定的线速度平移。
-
第四部分:知识扩展与深入理解
1. 螺旋运动是刚体运动的最一般形式
螺旋运动理论统一了刚体的基本运动:
-
当螺距 h = 0 时: 线速度
v = h * θ̇ = 0。运动退化为绕固定轴的纯旋转。例如,一扇门绕门轴转动。 -
当螺距 h → ∞ 时: 为了使线速度
v为有限值,角速度θ̇必须趋近于零。运动退化为沿直线的纯平移。这可以理解为绕一根在无穷远处的轴的旋转。
因此,平移和旋转都是螺旋运动的特例。
2. 与旋量的关系
幻灯片中提到的“就能真正的表示这个刚体的运动速度”指出了螺旋运动与旋量 的紧密联系。
-
旋量 是一个六维向量
(ω, v),用于描述刚体的瞬时运动。 -
螺旋运动 为旋量提供了直观的几何解释。一个旋量
(ω, v)本质上就定义了一根螺旋轴:-
ω的方向决定了轴的方向ŝ。 -
ω和v的相互关系决定了螺距h。 -
通过计算可以找到这根轴在空间中的位置
q。
-
所以,旋量是描述运动的代数工具,而螺旋运动是其几何图像。
总结
|
核心概念 |
说明 |
意义 |
|---|---|---|
|
螺旋运动定义 |
绕轴旋转 + 沿轴平移 |
描述了刚体最一般的运动形式。 |
|
螺旋轴 (q, ŝ, h) |
定义了运动的几何:位置、方向、旋转/平移比。 |
为运动提供了清晰的几何图像。 |
|
沙勒定理 |
任何运动瞬时都可看作螺旋运动。 |
奠定了用螺旋运动理论分析所有刚体运动的基础。 |
|
与旋量关系 |
旋量的几何实现。 |
连接了代数和几何,是机器人运动学分析的强大 |
物理表达:
p为刚体上固定一点
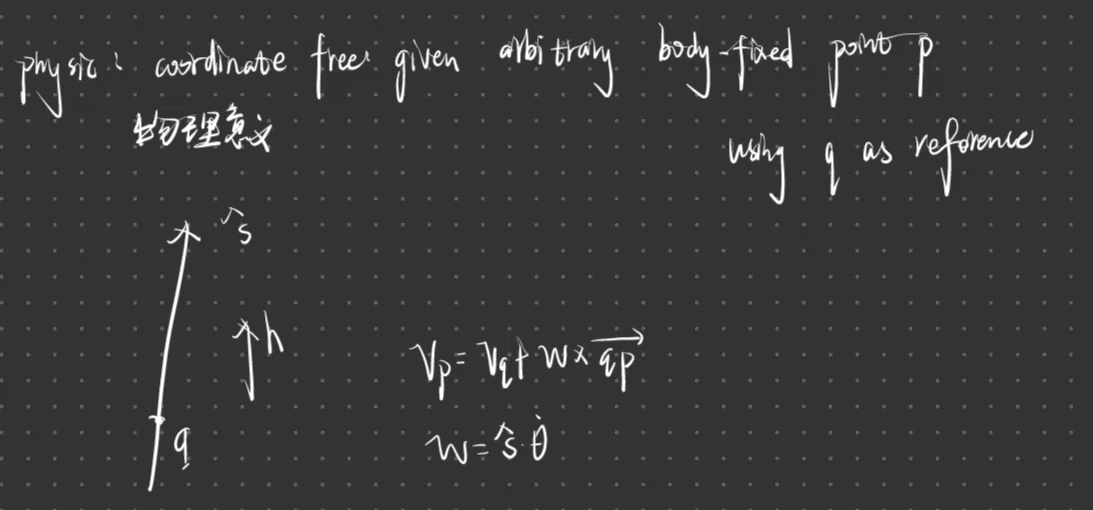
选取坐标系 数学表达
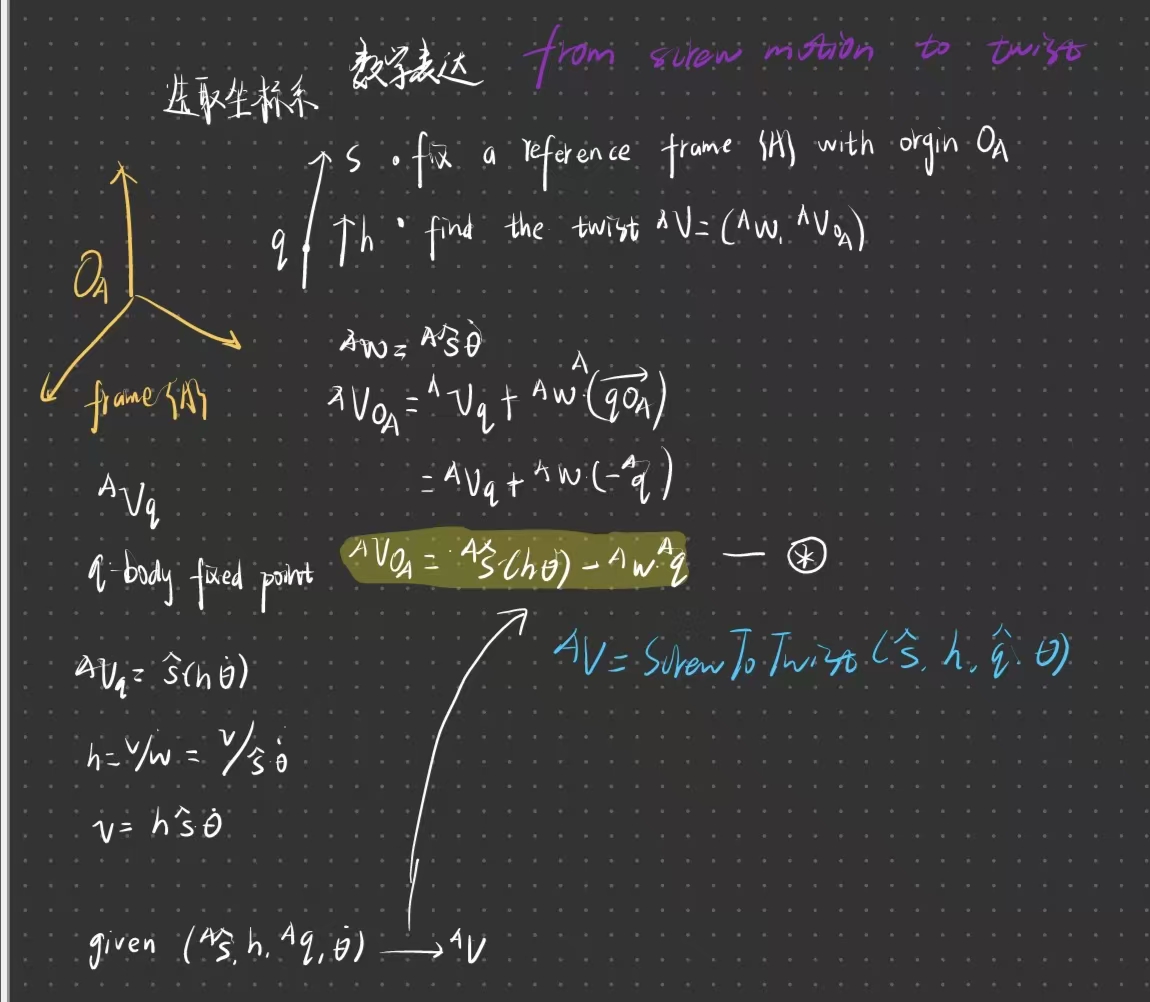
也是screw motion 如何转为twist的方法
根据twist转换为screw motion
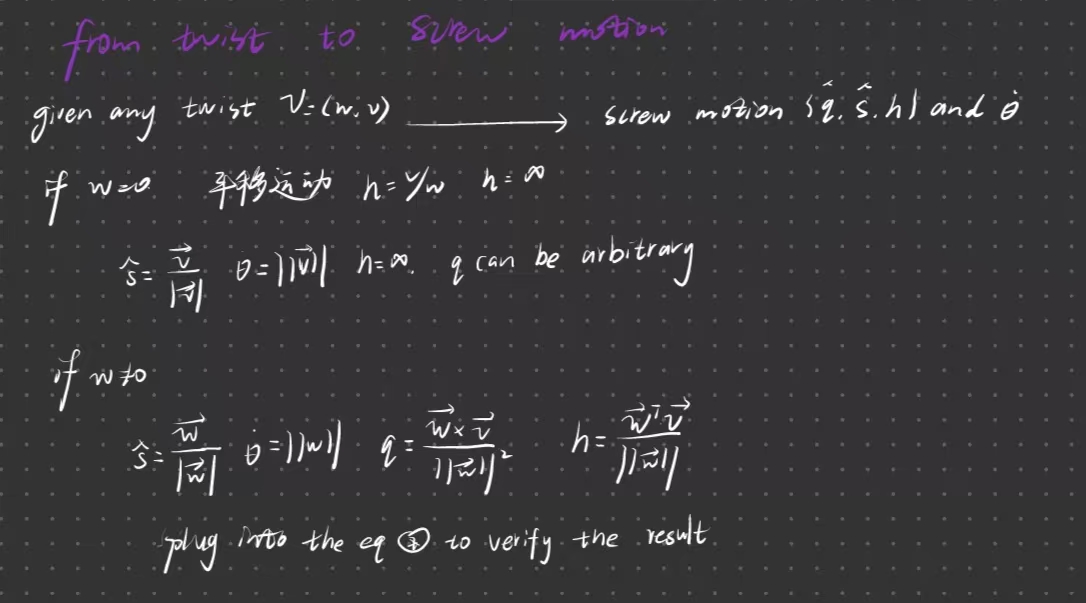
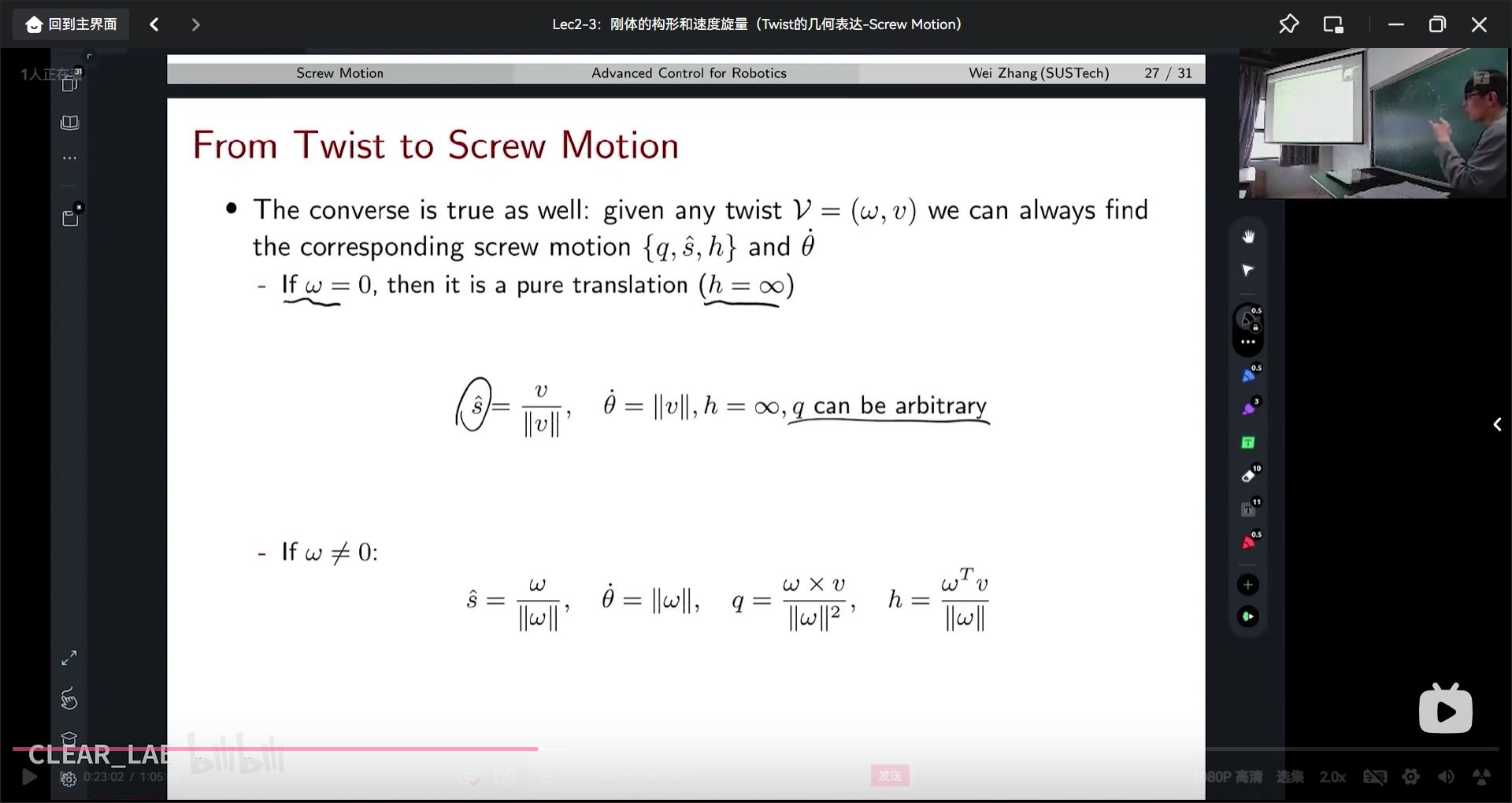
“当我们已知一个刚体的运动旋量(一组数字)时,它对应的实际物理运动是什么样子的?” 答案就是:它对应一个螺旋运动。幻灯片给出了从旋量 V=(ω,v)求解该螺旋运动具体参数的完整公式
Q1:如果要规划机器人的轨迹按照这种方法 任何一个瞬时时刻都有一个瞬时旋转轴 那么机器人的轨迹规划计算不应该非常麻烦吗 要进行坐标之间的变换 这个问题在具体项目中是如何解决的
图片中的Chasles定理(任何刚体运动瞬时都可看作螺旋运动)揭示了运动的本质,而实际轨迹规划则是在此基础上发展出的高效计算方法。
核心解决思路:从“瞬时轴”到“整体变换”
“每个瞬时时刻都有一个瞬时旋转轴”是完全正确的。但规划轨迹时,我们通常不会真的去计算每一个瞬时的螺旋轴。相反,我们利用一个更强大的数学工具:刚体运动的指数坐标

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐
 15
15 0
0- 0



 已为社区贡献6条内容
已为社区贡献6条内容

所有评论(0)