库卡机器人手臂维修示教器-插拔操作步骤
库卡机器人维修示教器的基本操作涵盖了诸多关键方面,其中包括如何更改示教器的语言设置,正确的手持示教器与使能器的使用方法
库卡机器人维修示教器的基本操作涵盖了诸多关键方面,其中包括如何更改示教器的语言设置,正确的手持示教器与使能器的使用方法,以及熟练掌握机器人运行状态的诊断输出技能,还包括示教器的拔插操作。
关于示教器的插拔操作,KUKA机器人的smartPAD具备便捷的热插拔功能,这意味着在不需要使用时,操作人员可以直接将其拔掉。拔下smartPAD的过程具有以下几个显著特点:
- 先在机器人系统处于接通状态时,操作人员也可以安全地取下smartPAD;
- smartPAD可以随时被重新插入;

- 新插入的smartPAD会自动适应机器人控制器的当前运行方式;
- 在插入时,smartPAD的固件版本并不会对操作产生任何影响,因为系统会自动进行必要的升级或降级处理;
- 值得注意的是,在插入后的30秒内,紧急停止和确认键的功能将暂时失效,需等待30秒后方可恢复正常;
- smartHMI(操作界面)会在大约15秒内自动重新显示。
拔下smartPAD的具体库卡机器人维修操作步骤如下:
- 先要按下专门用于拔下示教器smartPAD的按钮,
- 库卡的smartHMI上会显示一个清晰的信息提示和一个计时器,信息提示用于告知操作人员当前正在进行拔下smartPAD的操作,而计时器则开始计时25秒,操作人员必须在这个时间段内从机器人控制系统(KRC4)上拔下smartPAD。
- 打开配电箱门(V)KRC4,按照图示步骤从机器人控制器中拔下smartPAD插头。
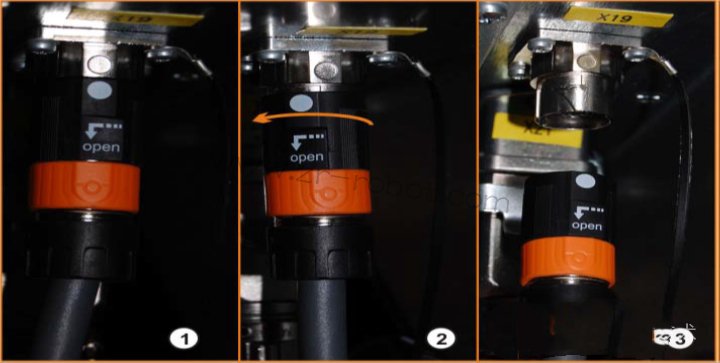
在此过程中,有几点需要特别注意:插头在插接状态时,应沿箭头方向将上部的黑色部件旋转约25°后再向下拔下插头;如果在计数器未运行的情况下取下示教器smartPAD,会触发紧急停止,只有重新插入示教器smartPAD后,紧急停止状态才能被取消;在计时器计时期间,如果没有拔下示教器smartPAD,则此次计时将失效,操作人员可以再次按下用于拔下的按钮,以重新显示信息和计时器;当smartPAD拔出后,则无法再通过其上的紧急停止按钮来使设备停机,必须在机器人控制系统上外接一个紧急停止装置以确保安全;示教器smartPAD拔出后,应立即从设备中撤离并妥善保管,放在KUKA机械臂进行作业的视线范围内,以避免有效的和无效的紧急停止装置被混淆,从而防止可能的人身伤害及财产损失。
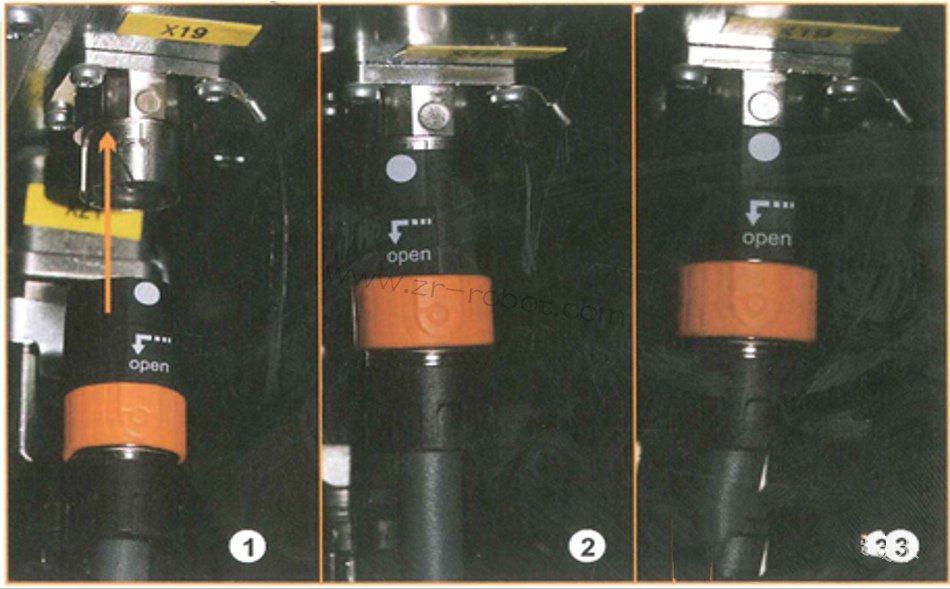
在插入库卡机器人维修示教器smartPAD之前,先要确保使用的是与当前机器人控制器相匹配的smartPAD规格。具体操作步骤如下:首先打开配电箱门(V)KRC4,然后准备插入smartPAD插头,在此过程中,需要注意插口和smartPAD插头上的标记以确保正确插入;接着,将插头向上推入插口,推上时,上部的黑色部件会自动旋转约25°直到插头自动卡止;最后,关闭配电箱门(V)KRC4,此时示教器即插入完成。需要注意的是,操作人员在将smartPAD插到机器人控制器上后,至少必须在smartPAD旁停留30秒,直到紧急停止和确认键再次恢复正常功能。这样可以确保在紧急情况下,能够正常使用紧急停止装置来停止设备的运行。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐

 4
4 0
0- 0



 已为社区贡献12条内容
已为社区贡献12条内容

所有评论(0)