abb机器人gsd文件_关于ABB机器人拐角路径警告50024
关于ABB机器人拐角路径警告50024
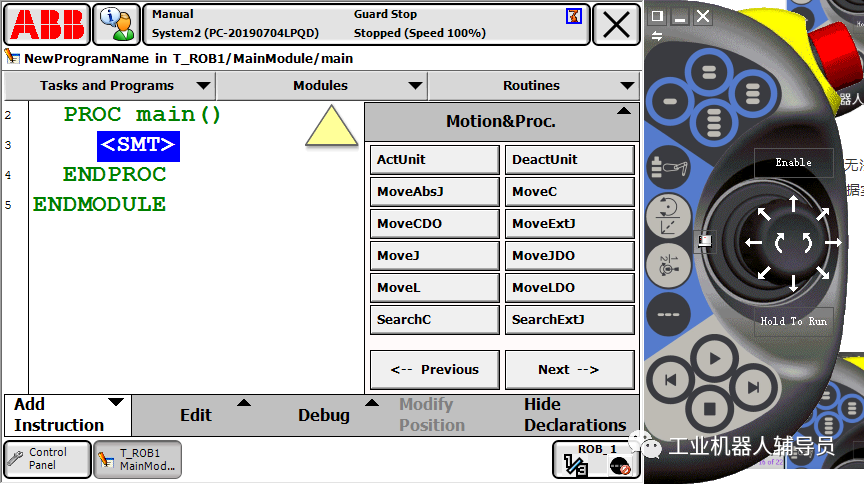
遇到50024是警告提示,设备能正常运行的可不做处理。如下图这种
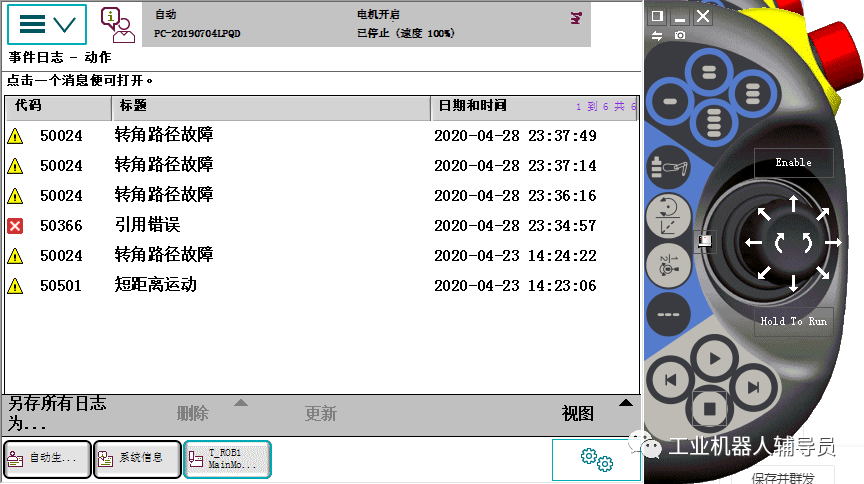
如何取消提示,如下通过系统提示的信息,使用指令CornerPathWarning取消该警告。
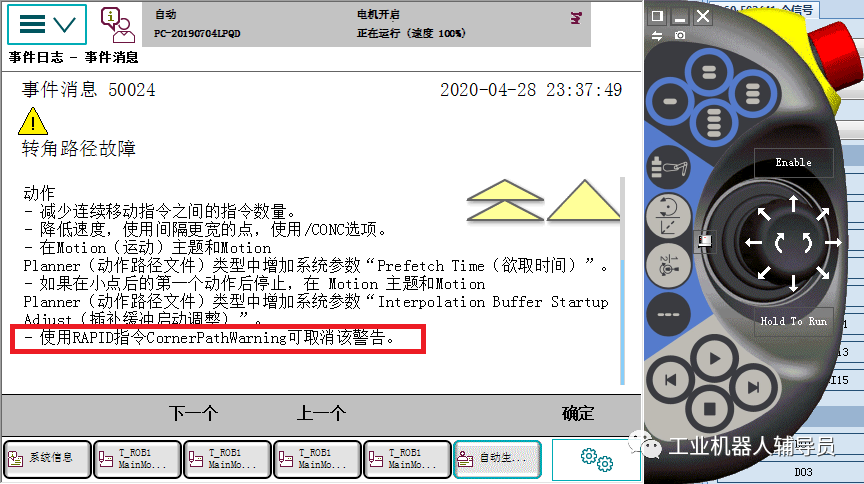
在程序中添加此指令,并将其置为FLASE即可。或者将最后运动结束的指令Z值改为fine。(指令添加在在Setting中选择)
产生原因:程序最后如果是运动指令,且不是fine点精确到达,会导致无法预读此拐角,计算不出拐角会报此故障。有些设备产生走走停停的就必须要根据实际情况修改拐角半径了。
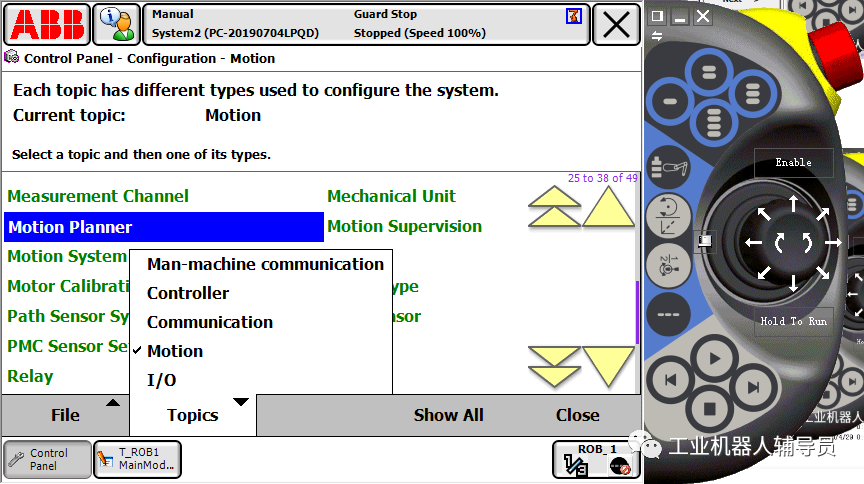
另外,如果遇到ABB 5.几的版本等没有此指令怎么办?
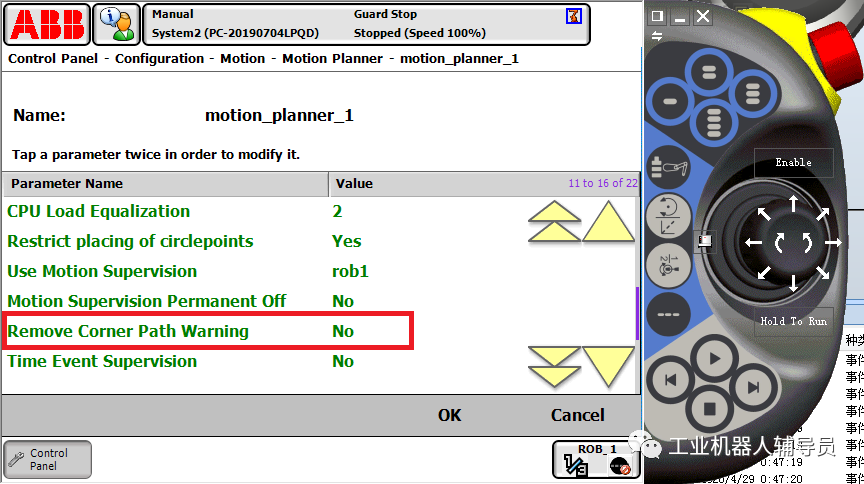
可以通过控制面板配置运动中取消,如下,改为YES重启即可。
最后,非常时期,在外面打工,工作的时候,能够尽量自己做饭,最好动手自己做!实在不行,尽量去通风人少的地方去!
更多信息请查看历史记录
FANUC机器人系统常用变量总结
KUKA电机与编码器引脚关系图表
YASKAWA机器人设备维护要点分析
ABB喷涂机器人吹扫系统的主要作用是什么
关于KUKA机器人程序运行BCO
YAMAHA机器人RCX240 I/O接线表(备用)
视觉检测(FANUC)与OFFSET补偿方式分类
关于YAMAHA机器人原点复位的问题
关于ABB机器人动作监控(手动)灵敏度修改的问题
ABB机器人检修时间如何消除(现场备用)
ABB机器人电池更换时回零程序Reference
ABB机器人视觉IP地址设置方法参考
YAMAHA机器人故障视频案例(系统备份方法)
YAMAHA机器人E17故障排除案例参考
FANUC伺服焊枪压力标定参考
FANUC伺服焊枪零点标定参考
工业机器人伺服焊枪设置(FANUC详细完整)
工业机器人故障管理与预防性工作
ABB机器人码垛包位置调整参考
关于安川机器人平衡气缸故障现象
关于安川机器人平衡气缸维护要点参考
FANUC机器人故障 SRVO-062解除方法
FANUC机器人电机编码器分析(图解)
FANUC机器人负载手动设置方法参考
安川机器人并行IO分配 (查询)
工业机器人电气设计元件选取规则参考
安川电机与伺服放大器电路接线图
ABB机器人减速机漏油检漏测试
ABB机器人紧凑型控制柜内部结构(图)
KUKA机器人CCU板信号指示灯(从颜色判断状态)
工业机器人伺服电机故障分析
感谢关注,有问题请留言!转载请注明出处!

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐

 0
0 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)