人形机器人‘平板脚’遭吐槽:科学家偷懒不设计足弓?真相颠覆你的认知!
当你的"骨骼"是航空铝材,"韧带"是伺服电机,"肌肉"是液压杆时,最佳策略就是把脚掌做成焊接钢板——简单粗暴的刚性连接能让力量传递效率高达98%,比人类足弓75%的能量转换率不知道高到哪里去了。就像电动汽车先有"油改电"的蹒跚,才有原生平台的爆发,机器人技术也正在经历它的"婴儿扁平足"阶段。看着波士顿动力机器人行云流水的后空翻,再低头瞄一眼它那双堪比铁板烧的平底脚,不禁让人陷入哲学思考——这年头连
最近刷短视频,总刷到波士顿Atlas后空翻、特斯拉Optimus搬箱子的视频。评论区有人调侃:“机器人走路怎么比我还笨?”但你知道吗?让机器人像人一样“稳稳走路”,背后藏着比造火箭还复杂的力学密码——今天咱们就从人体骨骼说起,拆解人形机器人“腿部骨架”的设计逻辑。
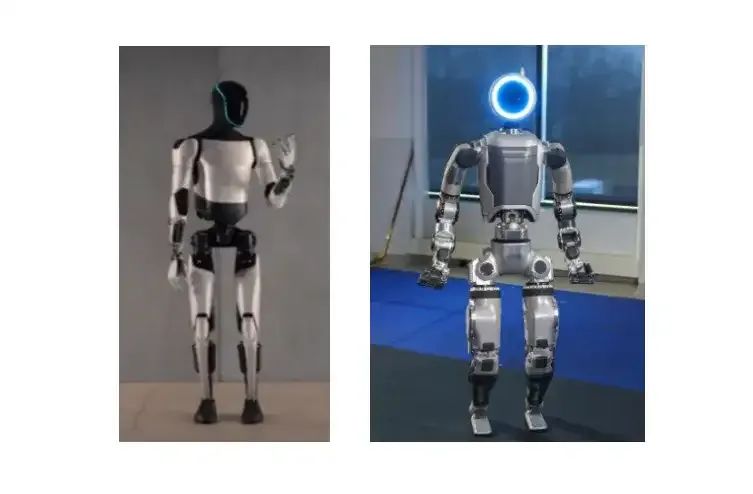
看着波士顿动力机器人行云流水的后空翻,再低头瞄一眼它那双堪比铁板烧的平底脚,不禁让人陷入哲学思考——这年头连扫地机器人都知道装个悬挂系统,为啥这些造价百万的仿生机器人却集体患上了"结构性强直足"?
这种反常识的设计,就像给法拉利装拖拉机轮胎,给芭蕾舞者穿登山靴,让当代机器人专家和人体工学家陷入了史诗级辩论:究竟是工程师们偷偷删除了《解剖学》课本,还是人类的足弓本就是上帝手滑多打的补丁?
要理解机器人界的"扁平足崇拜",得先从它们的生存环境说起。人类祖先花了百万年从树上走到草原,而机器人从工厂诞生那天起就活在平整的实验室地板上。这种堪比"温室花朵"的成长环境,让工程师们理直气壮地选择了"躺平式"设计——毕竟当你的活动范围永远比国标舞比赛场地还光滑时,足弓这种复杂结构就显得像给冰箱装越野轮胎般多余。某机器人研究员的名言道破天机:"我们给Atlas设计的脚掌比网红脸还平,不是因为不懂仿生学,而是因为MIT的走廊地砖比我的未来还平整。"
有一家公司打破了这种魔咒,那就是Cassie的研发公司Agility Robotics。Cassie这个家伙真是不愧于腿式机器人的称号——完全就只是两条腿。

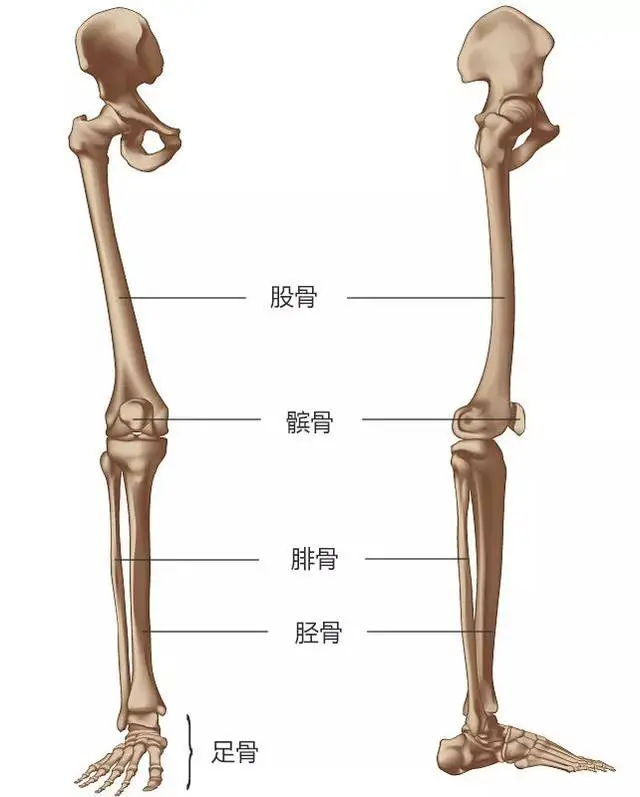
机械世界的物理法则正在重写人体工学教科书。人类的足弓本质上是生物进化的妥协方案:既要承受体重压力,又要兼顾灵活机动,最后进化成了自带弹簧的力学奇迹。但钢铁之躯哪需要这种折中方案?当你的"骨骼"是航空铝材,"韧带"是伺服电机,"肌肉"是液压杆时,最佳策略就是把脚掌做成焊接钢板——简单粗暴的刚性连接能让力量传递效率高达98%,比人类足弓75%的能量转换率不知道高到哪里去了。这就解释了为什么机器人踢足球从不崴脚:它们的脚踝根本就是台虎钳改装的。
减震?那都是碳基生物才需要的奢侈烦恼。当人类一瘸一拐抱怨地砖不平整时,人形机器人正靠着全身50个IMU传感器和1000Hz刷新率的控制算法,在微观尺度上完成着每秒数百次的姿态调整。这种"电子足弓"的减震原理堪称暴力美学:遇到颠簸?算它0.0001秒内调整电机扭矩!失去平衡?用比苍蝇振翅还快的反应速度找回重心!某实验室的经典笑话是:"我们的减震系统装在代码里,你们的减震系统长在脚底——这就叫降维打击。"
东京大学的研究人员就研发出了一款名为Kenshiro的新型人类肌肉骨骼机器人。

Kenshiro模仿的是日本12岁男性的形象,身高158cm,体重50kg。Kenshiro的身体几乎反映了人类的所有主要肌肉——腿部50块,躯干76块,肩部12块,颈部22块总计160块仿生肌肉。这些都使得Kenshiro拥有了更加灵活逼真的运动姿态。
造价与可靠性的二元对立,让足弓成了第一个被牺牲的"奢侈品"。给机器人装上仿生足弓,意味着要多出30个活动关节、15个压力传感器和数不清的故障点,维修难度直逼给蚂蚁做心脏搭桥。相比之下,一块铣削铝合金板既不会得足底筋膜炎,也不会闹关节炎,更不会因为"今天心情不好"就突然罢工。这就像问为什么共享单车不装玛莎拉蒂座椅——当你的产品需要被摔打千万次来训练AI时,最好的设计就是没有设计。
不过最扎心的真相或许是:当代机器人压根不需要行走的艺术。人类用几百万年进化出足弓是为了追羚羊和逃狮子,而机器人被制造出来主要是为了搬箱子和拧螺丝。当波士顿动力展示的跑酷视频让我们高潮迭起时,工业界实际需要的可能只是个会走直线的机械骡子。某工厂老板的吐槽振聋发聩:"我要的是能扛200斤注塑机不喊累的工人,不是能在平衡木上跳芭蕾的艺术家!"这种实用主义至上的逻辑,让机器人足部设计越来越像超市手推车——越傻越耐用。
未来某天,当人形机器人真的需要上山下海时,工程师们或许会重新拾起被遗弃的足弓设计。就像电动汽车先有"油改电"的蹒跚,才有原生平台的爆发,机器人技术也正在经历它的"婴儿扁平足"阶段。到那时,我们或许会看到这样的科技新闻:"
最新人形机器人采用仿生足弓设计,可连续跳跃8小时不抽筋

虽然它依然会以99%的概率选择坐电梯。"但在此之前,让我们继续欣赏这些钢铁生物用最朋克的方式行走世间:用绝对的力量对抗物理法则,用逆天的算法弥补结构缺陷,用实际行动证明
真正的科技进化,就是能把"设计缺陷"变成"行业标准"的神奇魔法。。。。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐


 5
5 0
0- 0



 已为社区贡献10条内容
已为社区贡献10条内容

所有评论(0)