Simpro4.1环境下实现KUKA机器人与末端执行器联动仿真
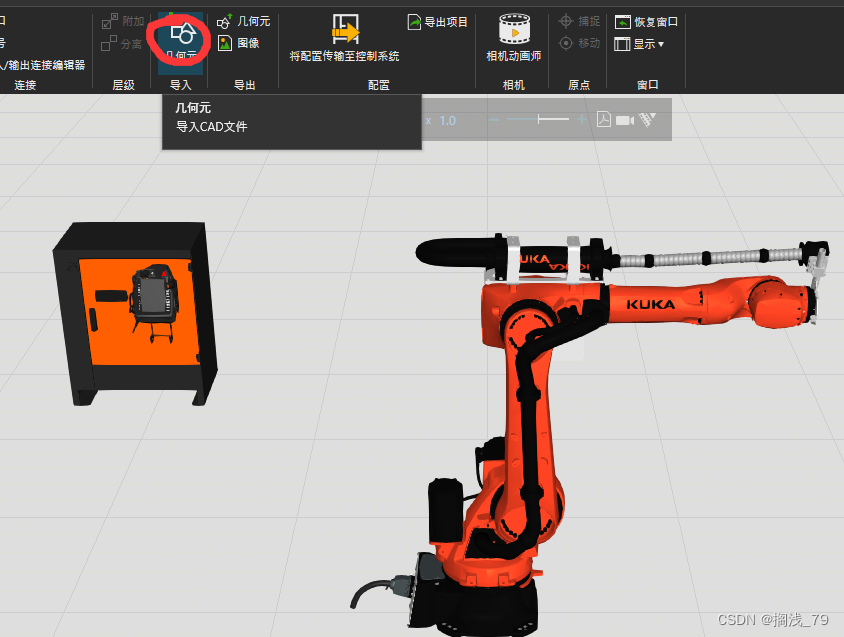
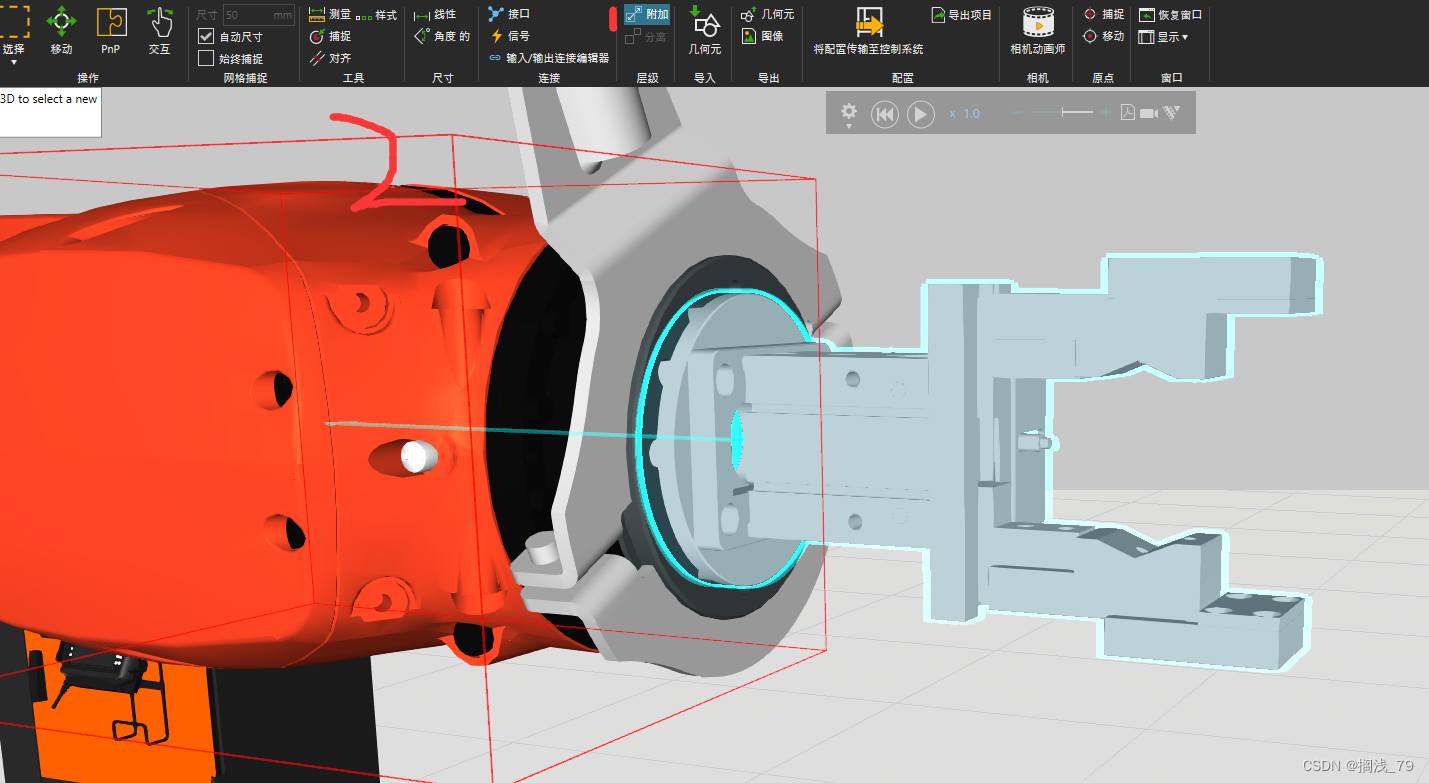
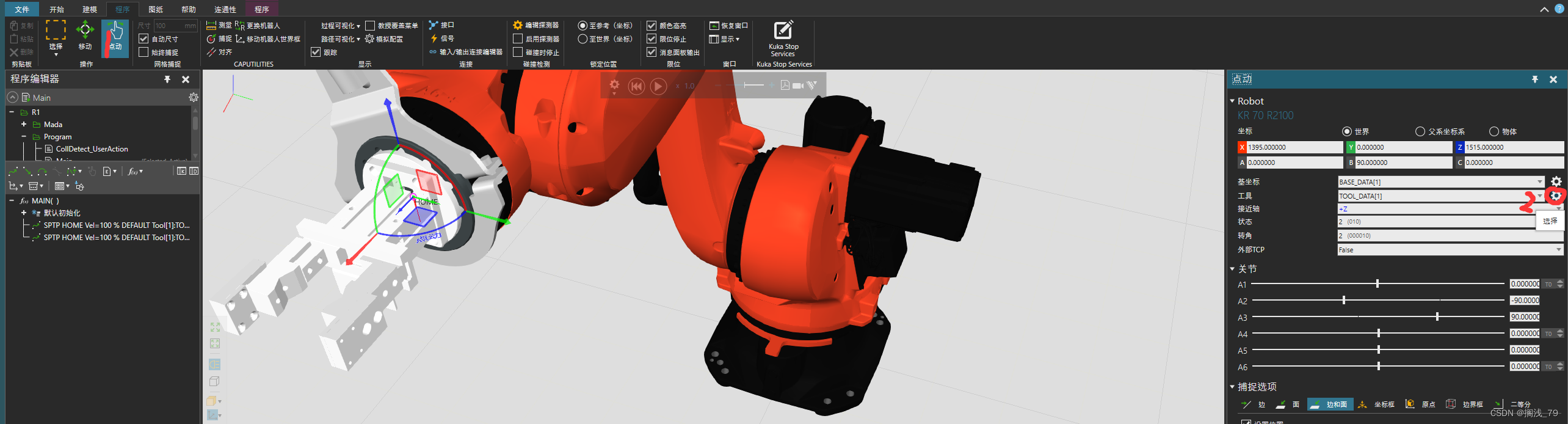
导入机器人与控制柜模块,再导入夹具末端,(.路径:\39062源文件\39062源文件\3D模型文件\夹具工具.IGS)在开始界面下选中夹具,选择:开始>操作>PnP,点击“工具>捕捉”将夹具固定在机器人末端法兰面,设置角度对齐。点击“层级>附加”,将夹具与A6轴绑定。此时夹具能跟随机器人运动。
1.导入模块
导入机器人与控制柜模块,再导入夹具末端,(夹具文件,提取码:s4k2.路径:\39062源文件\39062源文件\3D模型文件\夹具工具.IGS)
在开始界面下选中夹具,选择:开始>操作>PnP,点击“工具>捕捉”将夹具固定在机器人末端法兰面,设置角度对齐。
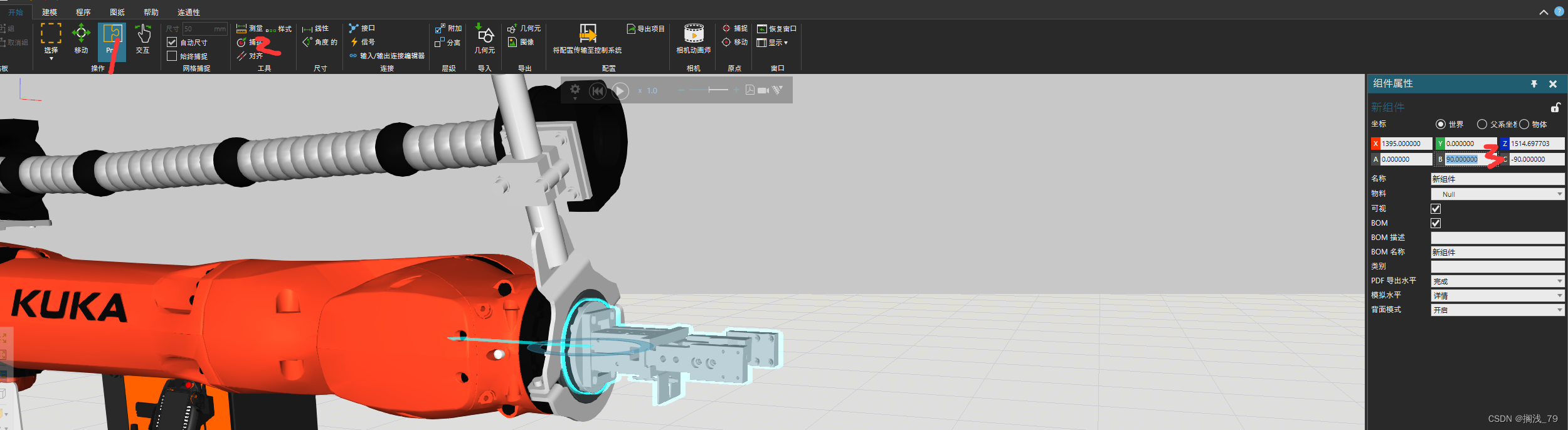
点击“层级>附加”,将夹具与A6轴绑定。此时夹具能跟随机器人运动。
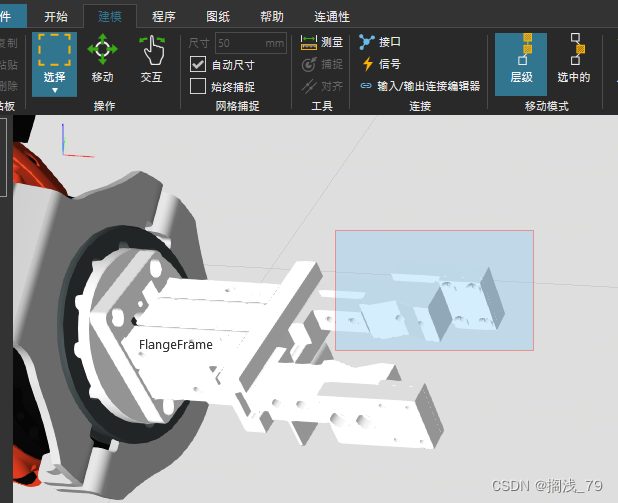
2.配置夹具
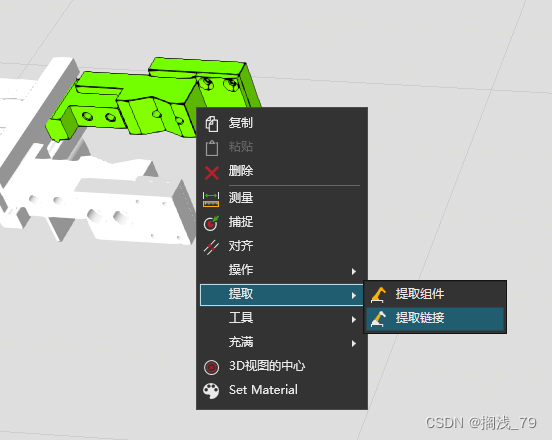
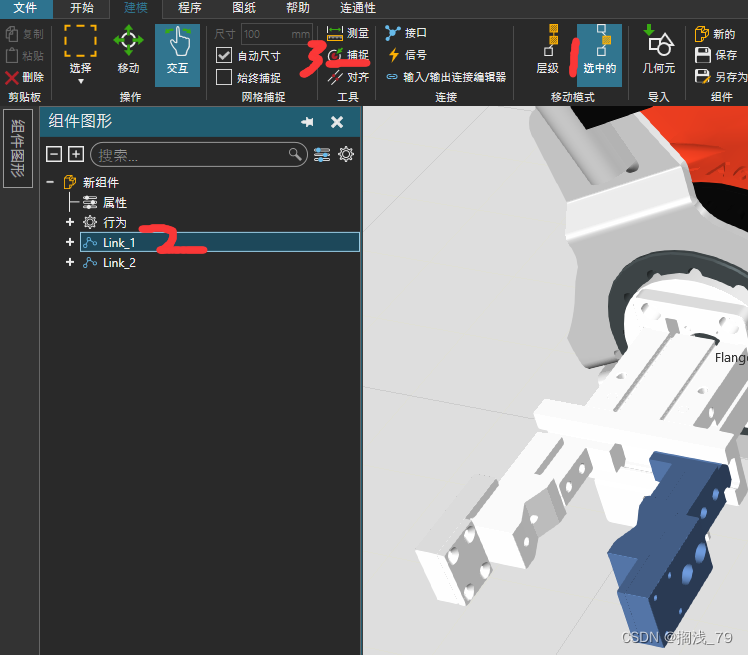
建模>操作>选择,选中夹具爪一边,右击选择“提取链接”。
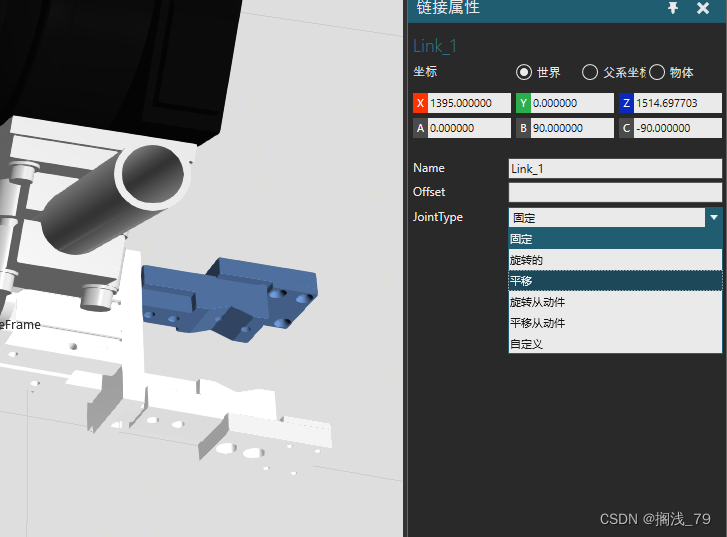
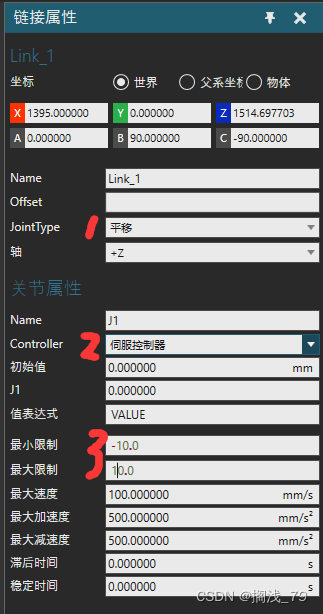
在链接属性选择平移,设置伺服控制器和移动限制范围
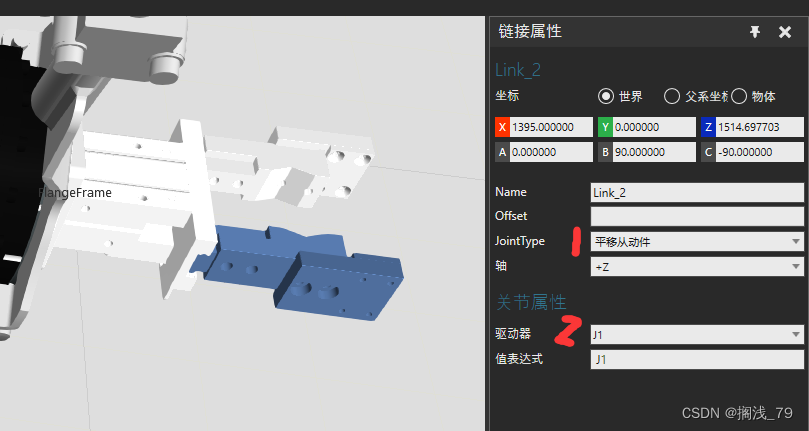
夹具爪另一边同样的设置,不同的是要选中“平移传动件”,驱动器是刚才设置的J1。
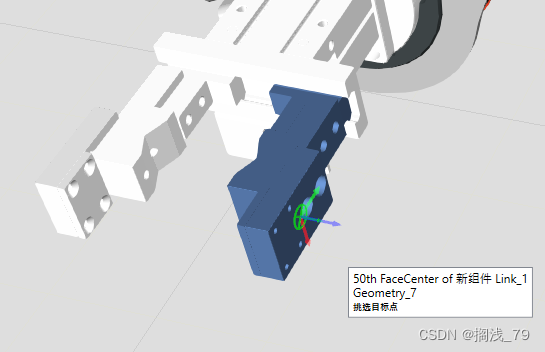
依此点击下图:,捕捉夹具一边的坐标原点(对应link1)。夹具另一边的原点设置步骤完全一致,(对应link2)。此时在“交互”界面选中情况下鼠标拖动夹具一边,夹具另一边跟着动。
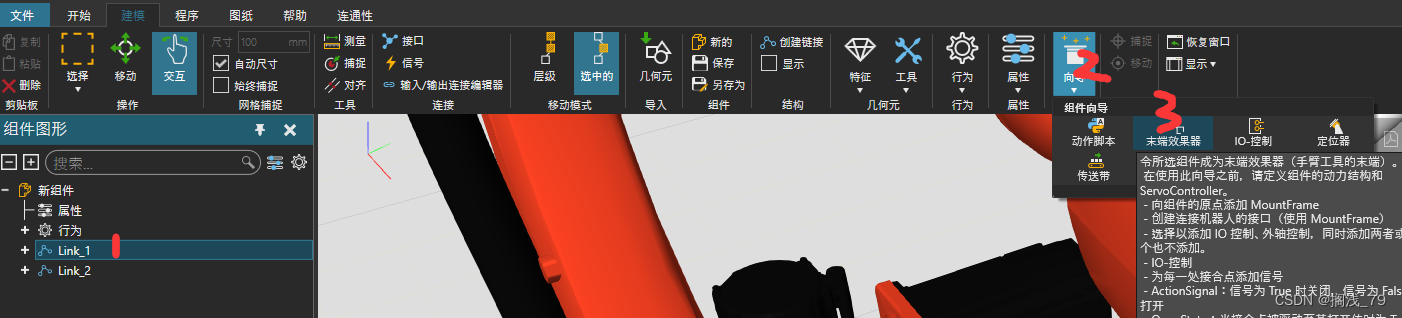
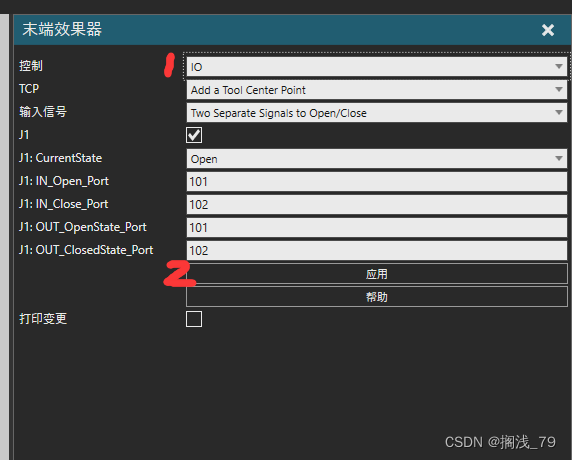
随后配置IO控制夹具。选择link1:,末端效果器中选择“IO”,默认J1的开、关是两个信号(101、102)控制的。点击应用。
此时组件图形显示:
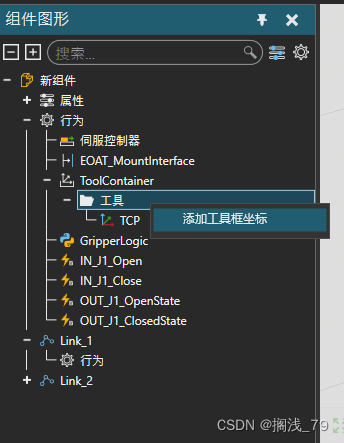
右击工具填加坐标系Tool。选中这个新添加的Tool,点击捕捉,选择“2点”,依此点击夹具两边,确定坐标原点在两爪子的中间。
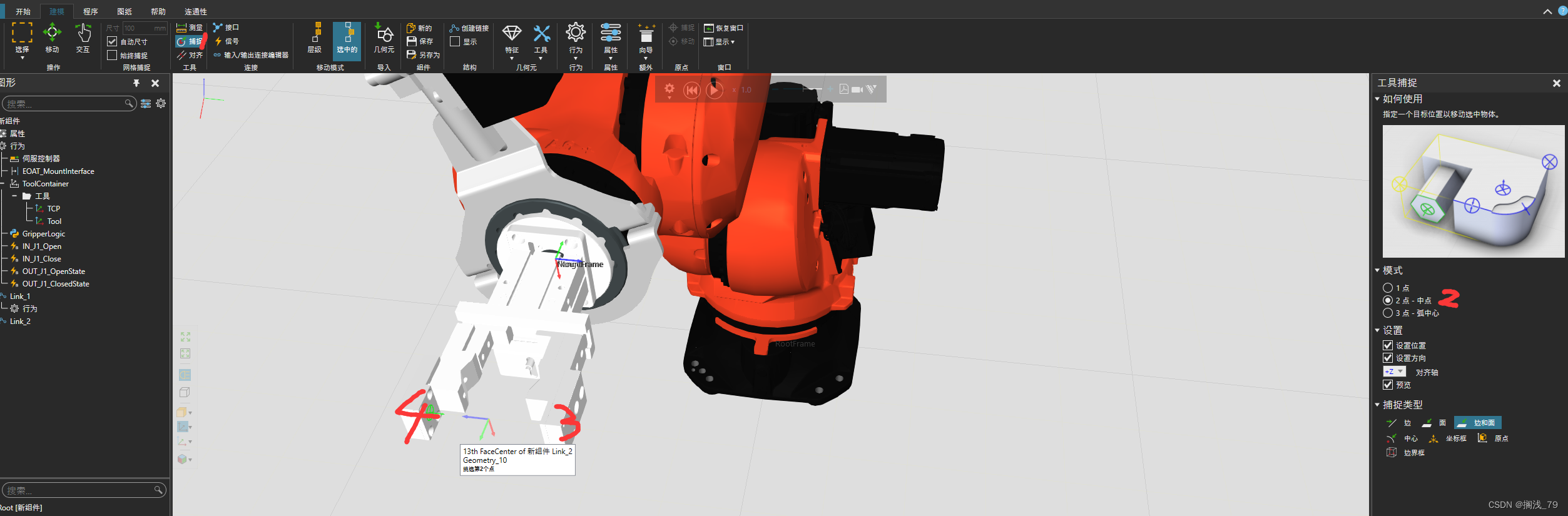
点击“组件图形”的“EOAT_MountInterface”,依次选择:
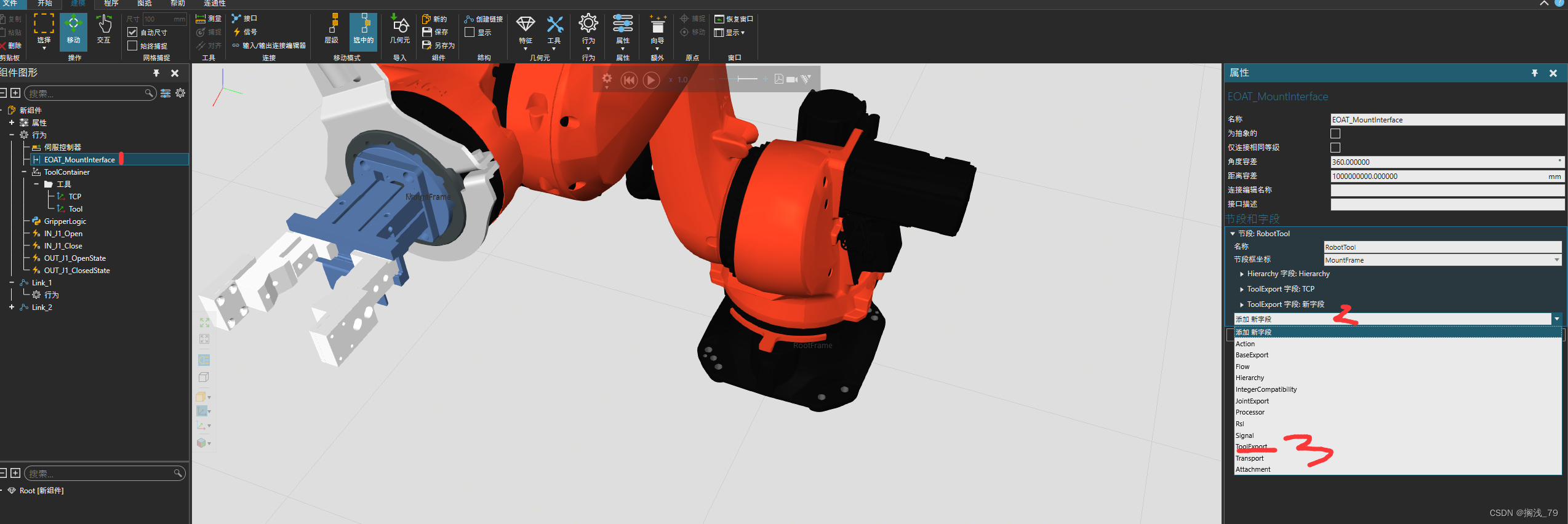
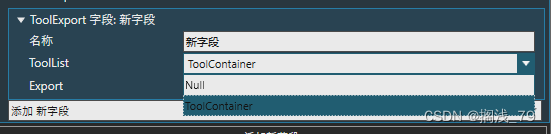
在Export选择ToolContainer
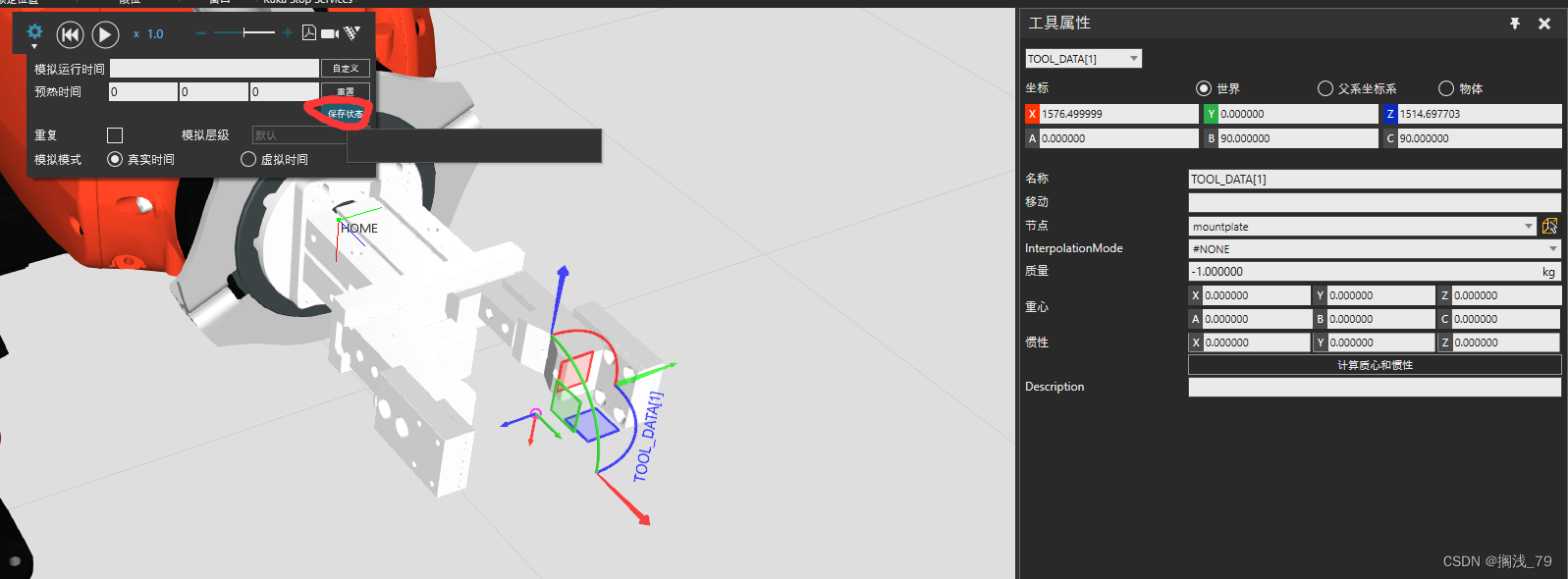
配置工具坐标系:
点击齿轮后,捕捉,确定工具坐标系。最后点击保存状态。
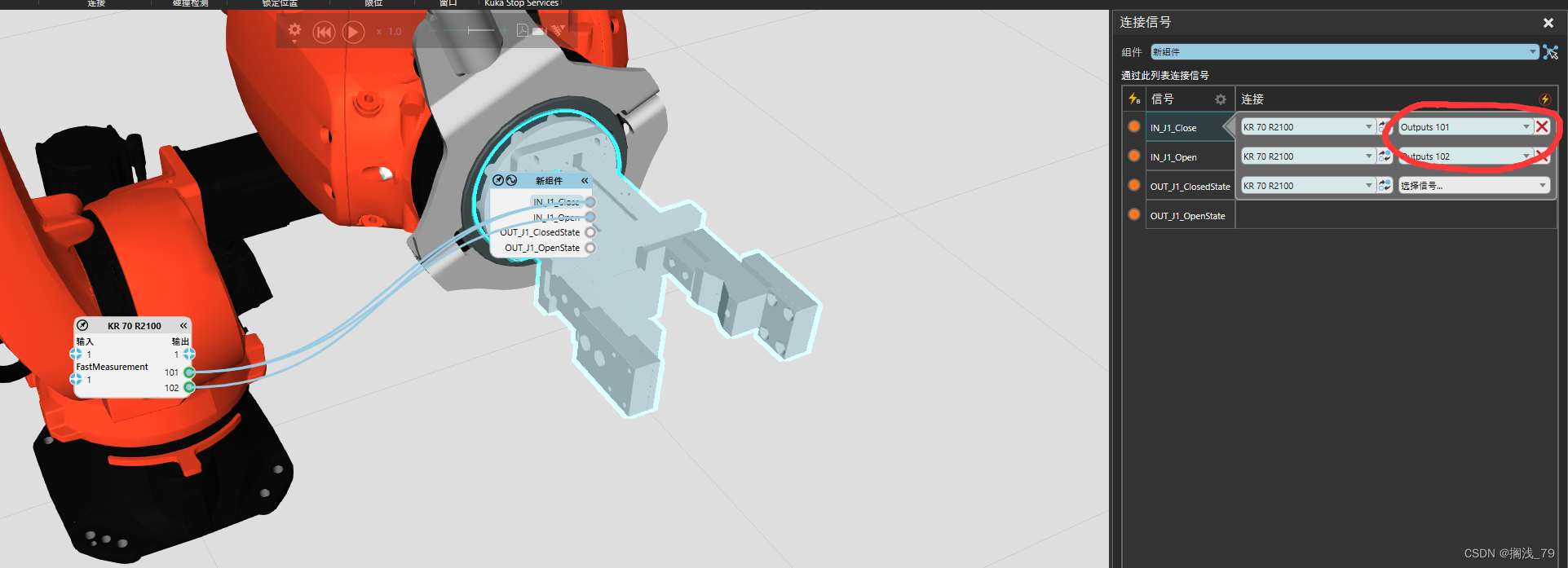
3.夹具与机器人通信连接
在“程序”下点击“信号”,会弹出信号框,在“连接信号”设置机器人的输出口。
点击机器人,在“组件属性”配置:
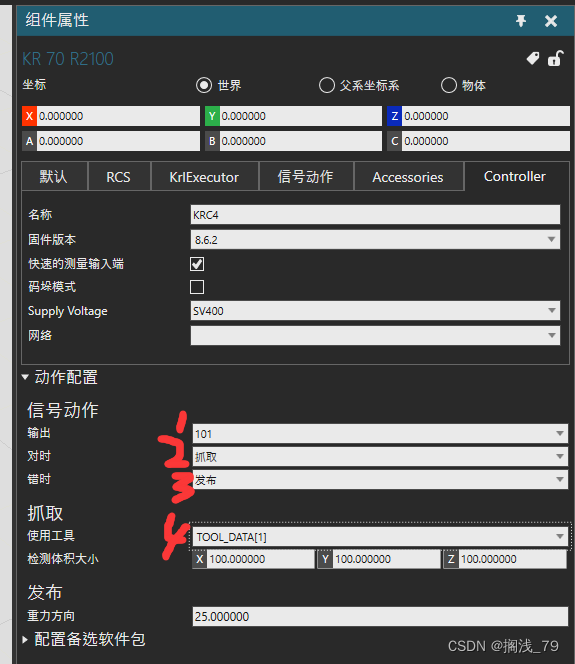
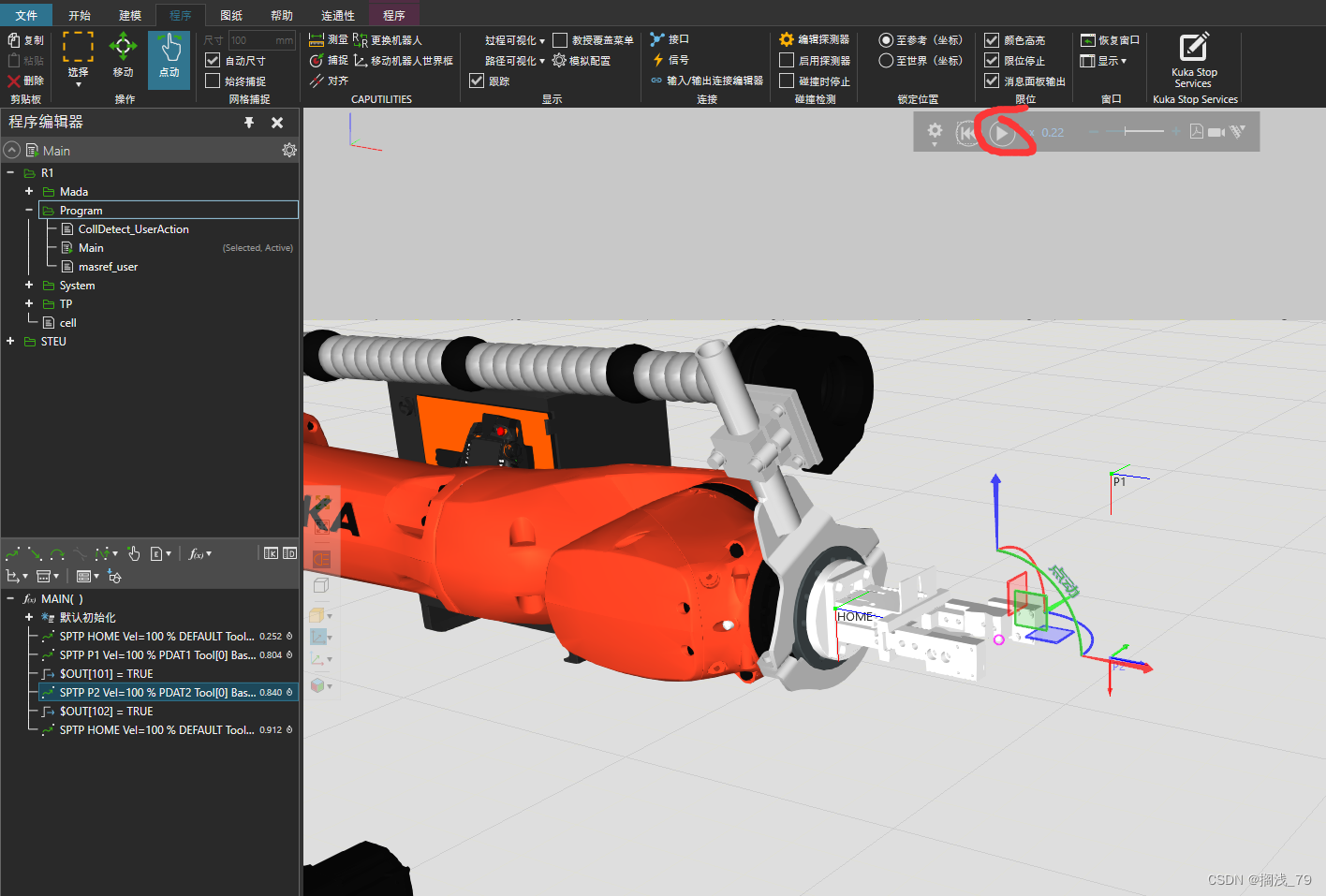
开始写程序,拖动夹具在不同位置,设置运动指令,点击运行

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐

 16
16 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)