【GitHub项目推荐--Genesis:通用机器人学习与具身AI生成平台】⭐⭐⭐⭐⭐
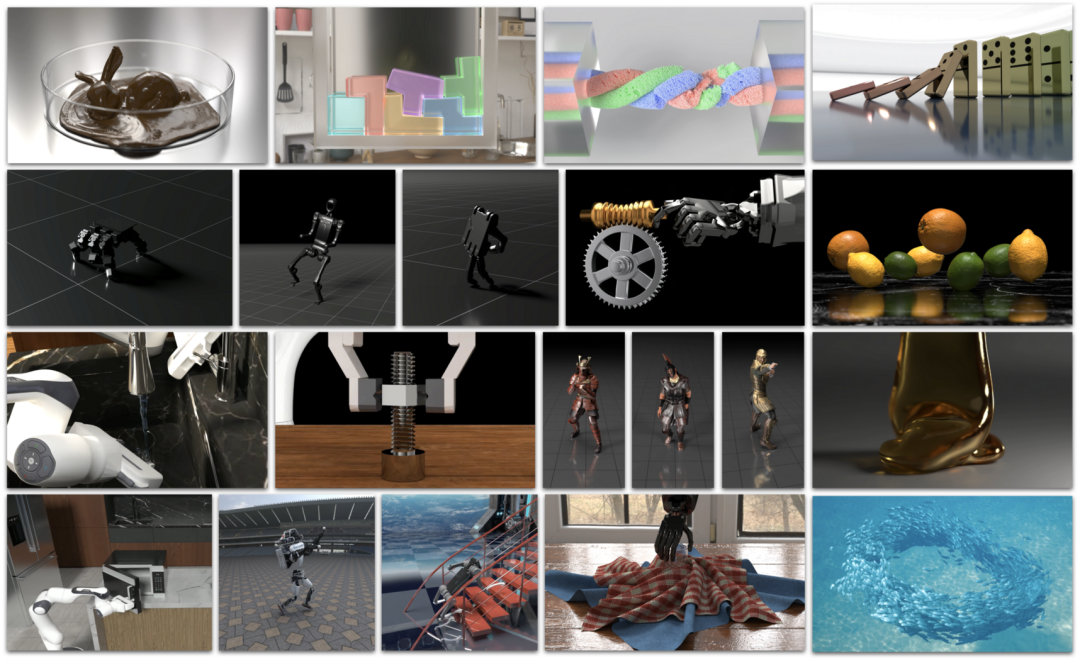
Genesis 是一个为通用机器人学和具身AI学习设计的生成式物理仿真平台。该项目由Genesis-Embodied-AI团队开发,提供了一个统一的物理引擎和仿真平台,支持多种物理求解器、材料模型和机器人类型,旨在降低机器人研究的门槛并自动化数据生成。🔗 GitHub地址🤖 核心价值:物理仿真 · 机器人学习 · 具身AI · 生成式数据 · 开源平台项目背景:机器人学习:机
简介
Genesis 是一个为通用机器人学和具身AI学习设计的生成式物理仿真平台。该项目由Genesis-Embodied-AI团队开发,提供了一个统一的物理引擎和仿真平台,支持多种物理求解器、材料模型和机器人类型,旨在降低机器人研究的门槛并自动化数据生成。
🔗 GitHub地址:
https://github.com/Genesis-Embodied-AI/Genesis
🤖 核心价值:
物理仿真 · 机器人学习 · 具身AI · 生成式数据 · 开源平台
项目背景:
-
机器人学习:机器人学习需求增长
-
仿真需求:高质量物理仿真需求
-
数据生成:自动化数据生成需求
-
统一平台:统一仿真平台需求
-
开源工具:开源机器人工具需求
项目特色:
-
⚡ 超高性能:4300万FPS仿真速度
-
🌐 跨平台:多平台多后端支持
-
🔄 统一框架:统一物理求解器框架
-
🎨 逼真渲染:照片级真实感渲染
-
🔓 完全开源:Apache 2.0开源许可
技术亮点:
-
重建引擎:从零重建的物理引擎
-
多求解器:多种物理求解器集成
-
可微分:完全可微分设计
-
生成式:生成式数据引擎
-
用户友好:简单易用API设计
主要功能
1. 核心功能体系
Genesis提供了一套完整的物理仿真和机器人学习解决方案,涵盖物理仿真、机器人支持、渲染系统、数据生成、学习框架、工具集成、扩展开发、多模态支持、自动化流程、社区生态等多个方面。
物理仿真功能:
物理求解器:
- 刚体动力学: 刚体物理仿真
- MPM求解器: 物质点法仿真
- SPH求解器: 光滑粒子流体力学
- FEM求解器: 有限元方法仿真
- PBD求解器: 位置动力学仿真
- 稳定流体: 流体动力学仿真
材料模型:
- 刚体材料: 各种刚体材料
- 液体模拟: 液体行为模拟
- 气体模拟: 气体行为模拟
- 可变形体: 可变形物体模拟
- 薄壳物体: 薄壳结构模拟
- 颗粒材料: 颗粒物质模拟
物理现象:
- 碰撞检测: 精确碰撞检测
- 接触力学: 接触力学模拟
- 流体动力学: 流体行为模拟
- 热力学: 热传导模拟
- 多物理场: 多物理场耦合机器人支持功能:
机器人类型:
- 机械臂: 各种机械臂支持
- 腿式机器人: 腿式移动机器人
- 无人机: 无人机仿真
- 软体机器人: 软体机器人仿真
- 自定义机器人: 自定义机器人设计
模型支持:
- MJCF格式: MuJoCo模型格式
- URDF格式: 标准URDF格式
- 3D模型: OBJ, GLB, PLY, STL
- 自定义模型: 自定义模型导入
- 参数化模型: 参数化机器人
控制接口:
- 运动控制: 运动控制接口
- 力控制: 力/力矩控制
- 轨迹规划: 运动轨迹规划
- 传感器模拟: 各种传感器模拟
- 状态反馈: 状态反馈接口2. 高级功能
渲染系统功能:
渲染类型:
- 光线追踪: 基于光线追踪渲染
- 实时渲染: 实时性能渲染
- 离线渲染: 高质量离线渲染
- 多视角渲染: 多摄像机视角
- 特殊效果: 各种渲染特效
渲染质量:
- 照片级: 照片级真实感
- 物理准确: 物理准确渲染
- 材质丰富: 丰富材质支持
- 光照真实: 真实光照模型
- 环境多样: 多样环境渲染
渲染性能:
- GPU加速: GPU加速渲染
- 多卡支持: 多GPU支持
- 分布式: 分布式渲染
- 优化算法: 渲染优化算法
- 实时交互: 实时交互渲染数据生成功能:
生成模式:
- 自动生成: 自动数据生成
- 条件生成: 条件数据生成
- 多样本: 多样本生成
- 多模态: 多模态数据生成
- 增量生成: 增量数据生成
数据类型:
- 轨迹数据: 运动轨迹数据
- 传感器数据: 各种传感器数据
- 图像数据: 视觉图像数据
- 物理数据: 物理状态数据
- 标注数据: 自动标注数据
生成控制:
- 质量控制: 生成质量控制
- 多样性控制: 多样性控制
- 难度控制: 任务难度控制
- 场景控制: 场景复杂度控制
- 自动化: 全自动化流程学习框架功能:
学习支持:
- 强化学习: 强化学习环境
- 模仿学习: 模仿学习支持
- 监督学习: 监督学习数据
- 无监督学习: 无监督学习
- 元学习: 元学习支持
算法集成:
- 主流算法: 主流RL算法集成
- 自定义算法: 自定义算法支持
- 基准测试: 算法基准测试
- 性能评估: 性能评估工具
- 比较分析: 算法比较分析
训练优化:
- 分布式训练: 分布式训练支持
- 加速训练: 训练加速优化
- 超参调优: 超参数调优
- 早停机制: 智能早停机制
- 结果可视化: 训练结果可视化安装与配置
1. 环境准备
系统要求:
硬件要求:
- GPU: NVIDIA/AMD GPU(推荐)
- 内存: 16GB+ RAM
- 存储: 20GB+ 可用空间
- CPU: 多核处理器
- 网络: 稳定网络连接
软件要求:
- 操作系统: Linux, Windows, macOS
- Python: 3.10-3.13
- PyTorch: 最新版本
- CUDA: NVIDIA CUDA(GPU用户)
- 编译器: C++编译器
GPU要求:
- NVIDIA: CUDA兼容GPU
- AMD: ROCm兼容GPU
- 苹果: Apple Silicon GPU
- 显存: 8GB+ 显存推荐
- 驱动: 最新GPU驱动后端支持:
计算后端:
- CPU: CPU计算后端
- NVIDIA CUDA: NVIDIA GPU
- AMD ROCm: AMD GPU
- Apple Metal: Apple GPU
- Vulkan: Vulkan API
渲染后端:
- 光线追踪: 光线追踪渲染
- 光栅化: 光栅化渲染
- Vulkan: Vulkan渲染
- Metal: Apple Metal渲染
- CUDA: NVIDIA CUDA渲染2. 安装步骤
PyPI安装(推荐):
# 先安装PyTorch
# 参考PyTorch官方安装指南
# 安装Genesis
pip install genesis-world
# 或安装最新版本
pip install --upgrade pip
pip install git+https://github.com/Genesis-Embodied-AI/Genesis.git开发安装:
# 克隆项目
git clone https://github.com/Genesis-Embodied-AI/Genesis.git
cd Genesis
# 开发模式安装
pip install -e ".[dev]"
# 确保依赖更新
pip install -e ".[dev]" --upgradeDocker安装:
# 构建Docker镜像
docker build -t genesis -f docker/Dockerfile docker
# 运行Docker容器
xhost +local:root
docker run --gpus all --rm -it \
-e DISPLAY=$DISPLAY \
-v /tmp/.X11-unix:/tmp/.X11-unix \
-v $(pwd):/workspace \
--name genesis genesis:latestAMD用户安装:
# AMD专用Docker
docker build -t genesis-amd -f docker/Dockerfile.amdgpu docker
# 运行AMD容器
docker run -it --network=host \
--device=/dev/kfd \
--device=/dev/dri \
--group-add=video \
--ipc=host \
genesis-amd
# 使用Vulkan后端
gs.init(vulkan)云平台部署:
# 云GPU实例部署
# 配置GPU云实例
# 安装NVIDIA驱动和CUDA
# 安装Genesis
# 运行仿真任务3. 配置说明
基础配置:
# 初始化配置
import genesis as gs
# 基本初始化
gs.init()
# 或指定后端
gs.init(backend="cuda")
gs.init(backend="vulkan") # AMD用户
# 配置物理参数
gs.config.set_physics_params({
"gravity": [0, -9.8, 0],
"substeps": 10,
"solver_iterations": 50
})
# 配置渲染参数
gs.config.set_render_params({
"resolution": [1920, 1080],
"samples_per_pixel": 256,
"max_bounces": 8
})仿真配置:
# 仿真场景配置
scene_config = {
"name": "robotics_scene",
"physics_engine": "mpm", # MPM求解器
"materials": ["rigid", "fluid", "elastic"],
"boundary_conditions": {
"walls": True,
"floor": True,
"ceiling": False
},
"render_quality": "high"
}
# 创建场景
scene = gs.create_scene(scene_config)机器人配置:
# 机器人加载配置
robot_config = {
"type": "franka", # 弗兰卡机械臂
"urdf_path": "robots/franka/urdf/franka.urdf",
"control_mode": "torque", # 力矩控制
"sensors": ["camera", "force_torque", "joint_position"],
"initial_pose": {
"position": [0, 0.5, 0],
"orientation": [0, 0, 0, 1]
}
}
# 加载机器人
robot = scene.load_robot(robot_config)学习配置:
# 强化学习环境配置
env_config = {
"name": "reach_task",
"max_steps": 1000,
"reward_function": "sparse_reward",
"observation_space": {
"type": "dict",
"spaces": {
"joint_pos": Box(low=-pi, high=pi, shape=(7,)),
"joint_vel": Box(low=-10, high=10, shape=(7,)),
"end_effector": Box(low=-10, high=10, shape=(3,))
}
},
"action_space": Box(low=-1, high=1, shape=(7,))
}
# 创建RL环境
env = gs.create_env(env_config)数据生成配置:
# 数据生成配置
data_gen_config = {
"mode": "automatic",
"modalities": ["rgb", "depth", "segmentation", "optical_flow"],
"sample_count": 10000,
"quality": "high",
"diversity": {
"scenes": 100,
"lighting": 50,
"materials": 20,
"viewpoints": 10
},
"output_format": "hdf5"
}
# 配置数据生成器
data_generator = gs.DataGenerator(data_gen_config)使用指南
1. 基本工作流
使用Genesis的基本流程包括:环境准备 → 平台安装 → 场景创建 → 机器人加载 → 物理配置 → 渲染设置 → 任务定义 → 仿真运行 → 数据收集 → 算法训练 → 结果评估 → 部署应用。整个过程设计为完整的机器人学习工作流。
2. 基本使用
仿真环境使用:
场景创建:
1. 初始化: 初始化Genesis
2. 场景创建: 创建物理场景
3. 对象添加: 添加仿真对象
4. 物理设置: 设置物理参数
5. 渲染设置: 设置渲染参数
仿真运行:
- 时间步进: 步进仿真时间
- 状态获取: 获取仿真状态
- 控制输入: 输入控制命令
- 数据记录: 记录仿真数据
- 可视化: 实时可视化
场景管理:
- 对象管理: 管理场景对象
- 物理管理: 管理物理参数
- 渲染管理: 管理渲染设置
- 状态保存: 保存场景状态
- 场景重置: 重置仿真场景机器人控制使用:
机器人加载:
1. 模型选择: 选择机器人模型
2. 参数配置: 配置机器人参数
3. 加载场景: 加载到场景中
4. 初始位姿: 设置初始位姿
5. 控制器: 配置控制器
控制接口:
- 位置控制: 位置控制模式
- 力控制: 力/力矩控制
- 阻抗控制: 阻抗控制
- 轨迹跟踪: 轨迹跟踪控制
- 自定义控制: 自定义控制器
状态监控:
- 关节状态: 监控关节状态
- 末端状态: 末端执行器状态
- 传感器数据: 传感器数据读取
- 碰撞检测: 碰撞状态检测
- 性能监控: 性能指标监控数据生成使用:
数据配置:
1. 模式选择: 选择生成模式
2. 模态选择: 选择数据模态
3. 质量设置: 设置数据质量
4. 多样性: 设置多样性参数
5. 输出格式: 设置输出格式
生成过程:
- 自动生成: 自动数据生成
- 进度监控: 监控生成进度
- 质量检查: 检查数据质量
- 存储管理: 数据存储管理
- 统计报告: 生成统计报告
数据使用:
- 数据加载: 加载生成数据
- 数据验证: 验证数据质量
- 数据分析: 分析数据特征
- 训练使用: 用于模型训练
- 评估使用: 用于算法评估3. 高级用法
强化学习使用:
RL环境:
1. 环境创建: 创建RL环境
2. 任务定义: 定义学习任务
3. 奖励设计: 设计奖励函数
4. 观察空间: 定义观察空间
5. 动作空间: 定义动作空间
训练流程:
- 算法选择: 选择RL算法
- 训练配置: 配置训练参数
- 训练运行: 运行训练过程
- 进度监控: 监控训练进度
- 结果评估: 评估训练结果
高级功能:
- 分布式训练: 分布式训练支持
- 课程学习: 课程学习设置
- 迁移学习: 迁移学习支持
- 多任务学习: 多任务学习
- 元学习: 元学习支持物理研究使用:
物理实验:
1. 实验设计: 设计物理实验
2. 参数设置: 设置实验参数
3. 场景构建: 构建实验场景
4. 数据采集: 采集实验数据
5. 结果分析: 分析实验结果
高级仿真:
- 多物理场: 多物理场仿真
- 材料研究: 新材料研究
- 耦合仿真: 多物理耦合
- 边界条件: 复杂边界条件
- 验证验证: 仿真结果验证
科研应用:
- 论文研究: 学术研究支持
- 算法开发: 新算法开发
- 方法比较: 方法比较研究
- 基准测试: 基准测试创建
- 成果验证: 研究成果验证工业应用使用:
工业仿真:
1. 需求分析: 分析工业需求
2. 场景建模: 建立工业场景
3. 流程仿真: 仿真工业流程
4. 性能评估: 评估系统性能
5. 优化改进: 优化改进方案
应用领域:
- 制造仿真: 制造过程仿真
- 测试验证: 产品测试验证
- 安全评估: 安全性能评估
- 效率优化: 流程效率优化
- 成本分析: 成本效益分析
实际部署:
- 数字孪生: 数字孪生创建
- 实时监控: 实时监控系统
- 预测维护: 预测性维护
- 优化控制: 优化控制系统
- 培训系统: 员工培训系统应用场景实例
案例1:机器人技能学习
场景:机械臂操作技能学习
解决方案:使用Genesis进行机械臂技能学习。
实施方法:
-
环境搭建:搭建操作场景
-
任务定义:定义操作任务
-
算法训练:训练操作技能
-
性能评估:评估技能性能
-
实际部署:部署到真实机器人
学习价值:
-
技能掌握:掌握操作技能
-
效率提升:学习效率提升
-
安全训练:安全环境训练
-
成本降低:训练成本降低
-
泛化能力:良好泛化能力
案例2:具身AI研究
场景:具身人工智能研究
解决方案:使用Genesis进行具身AI研究。
实施方法:
-
智能体设计:设计AI智能体
-
环境丰富:丰富环境设置
-
学习算法:应用学习算法
-
能力评估:评估智能体能力
-
论文发表:发表研究成果
研究价值:
-
算法开发:新算法开发
-
性能评估:全面性能评估
-
比较研究:算法比较研究
-
可重复性:可重复实验
-
学术贡献:学术贡献价值
案例3:工业自动化
场景:工业自动化仿真
解决方案:使用Genesis进行工业自动化仿真。
实施方法:
-
产线建模:建立生产线模型
-
流程仿真:仿真生产流程
-
优化分析:分析优化方案
-
性能预测:预测系统性能
-
实际应用:应用到实际产线
工业价值:
-
流程优化:优化生产流程
-
成本节约:节约开发成本
-
风险降低:降低实施风险
-
效率提升:提升生产效率
-
质量提高:提高产品质量
案例4:教育训练
场景:机器人学教育训练
解决方案:使用Genesis进行机器人学教育。
实施方法:
-
课程设计:设计教学课程
-
实验创建:创建教学实验
-
学生实践:学生实践操作
-
效果评估:评估学习效果
-
技能认证:技能认证考核
教育价值:
-
实践学习:实践性学习
-
理解深入:深入理解原理
-
技能培养:实用技能培养
-
兴趣激发:激发学习兴趣
-
就业准备:就业技能准备
案例5:科学研究
场景:物理现象科学研究
解决方案:使用Genesis进行物理现象研究。
实施方法:
-
现象选择:选择研究现象
-
实验设计:设计仿真实验
-
参数研究:研究参数影响
-
数据分析:分析仿真数据
-
理论验证:验证物理理论
科研价值:
-
现象理解:深入理解现象
-
理论验证:验证物理理论
-
新发现:新现象发现
-
方法开发:新研究方法
-
学术贡献:贡献学术知识
总结
Genesis作为一个功能强大的通用物理仿真平台,通过其超高性能、统一框架、逼真渲染、生成式数据和开源特性,为机器人学习、具身AI研究和物理仿真提供了理想的解决方案。
核心优势:
-
⚡ 超高性能:4300万FPS仿真速度
-
🌐 统一框架:统一物理求解器框架
-
🎨 逼真渲染:照片级真实感渲染
-
🤖 全面支持:全面机器人支持
-
🔓 开源免费:Apache 2.0开源
适用场景:
-
机器人技能学习
-
具身AI研究
-
工业自动化仿真
-
教育训练
-
科学研究
立即开始使用:
# 安装Genesis
pip install genesis-world
# 或开发安装
git clone https://github.com/Genesis-Embodied-AI/Genesis.git
cd Genesis
pip install -e ".[dev]"资源链接:
-
📚 项目地址:GitHub仓库
-
📖 文档:多语言文档
-
🎓 教程:教程和示例
-
💬 社区:社区支持
-
🔧 配置:配置指南
通过Genesis,您可以:
-
高效仿真:高效物理仿真
-
机器人学习:机器人技能学习
-
AI研究:具身AI研究
-
数据生成:自动数据生成
-
科研支持:科学研究支持
无论您是研究人员、工程师、教育工作者还是学生,Genesis都能为您提供强大、高效且易用的物理仿真解决方案!
特别提示:
-
💻 环境准备:准备GPU环境
-
🐍 Python版本:使用Python 3.10+
-
🔧 后端选择:选择合适的后端
-
📊 性能优化:根据需求优化
-
💾 存储准备:准备足够存储
通过Genesis,体验下一代物理仿真!
未来发展:
-
🚀 更多功能:持续添加新功能
-
🤖 更智能:更智能的生成式AI
-
⚡ 更快速:更快的仿真速度
-
🌍 更广泛:更广泛的应用支持
-
🔧 更易用:更简单的使用体验
加入社区:
参与方式:
- GitHub: 提交问题和PR
- 文档: 贡献文档改进
- 示例: 贡献使用示例
- 算法: 贡献新算法
- 反馈: 提供使用反馈
社区价值:
- 技术交流学习
- 问题解答支持
- 功能建议讨论
- 研究成果分享
- 共同推动发展通过Genesis,共同推动机器人学和AI发展!
许可证:
Apache-2.0开源许可证
免费用于商业用途致谢:
特别感谢:
- 开发团队: Genesis团队
- 贡献者: 代码贡献者
- 合作项目: 开源项目合作
- 社区: 社区支持者
- 用户: 用户反馈支持通过Genesis,开启物理仿真的新篇章!

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐

 15
15 0
0- 0



 已为社区贡献39条内容
已为社区贡献39条内容

所有评论(0)