计算机视觉中的坐标变换
高级驾驶辅助系统(ADAS)领域,存在多种常用的坐标系:LiDAR 坐标系、车辆坐标系、相机坐标系、图像坐标系等。因为和这些坐标系频繁打交道,本文对点的旋转与坐标系旋转等变换给出直观推导与说明。
0.概述
高级驾驶辅助系统(ADAS)领域,存在多种常用的坐标系:LiDAR 坐标系、车辆坐标系、相机坐标系、图像坐标系等。因为和这些坐标系频繁打交道,本文对点的旋转与坐标系旋转等变换给出直观推导与说明。
1.平移变换
1.1坐标系平移
1.2坐标点平移
2.旋转变换
2.1坐标系旋转变换
如下图所示,设原来的P点坐标为(x,y),表示为极坐标(r,α)
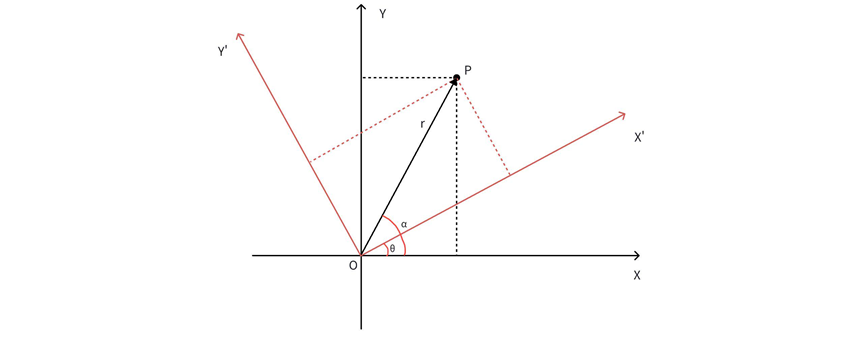
则有如下关系式:
若将坐标系逆时针旋转角度θ,则原来的P点极坐标(r,α)→ (r, α-θ),则
表示为矩阵形式如下:
2.2坐标点旋转变换
如果是坐标系不变,只是坐标点绕原点逆时针旋转角度θ,如下图所示:
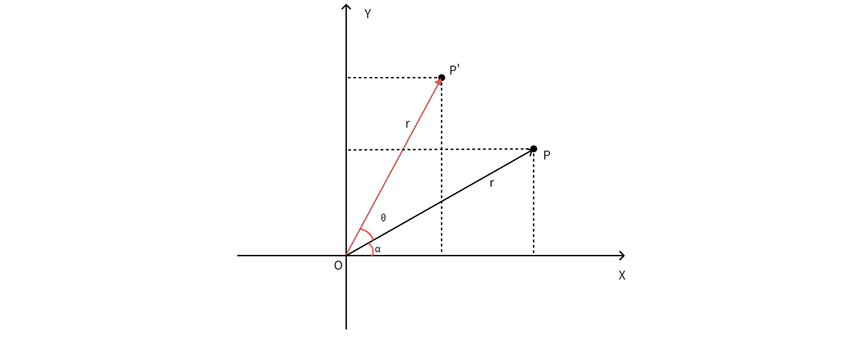
在极坐标中表示为对应关系:
表示为原来的 P点坐标:
表示为旋转变换后 P' 的坐标
表示为矩阵形式如下:
如果旋转中心不在原点,比如下图所示的A点(x0,y0),
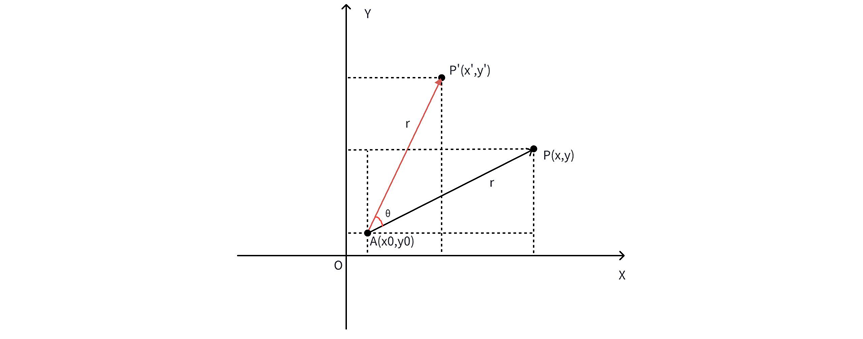
使用复数表示AP向量为:
则绕A点逆时针旋转θ角度后,得到
向量为:
展开得到:
由此根据AP向量与A点坐标,得到P’坐标为:
表示为矩阵形式如下:
代码实现如下:
""" data point coordinate transformation"""
def trans_curr_bevroi_to_large_img(
curr_bevroi_corner_input,
ego_pose,
yaw,
vcs_bevroi_range_x,
vcs_bevroi_range_y,
ego_and_center_dist,
):
"""
curr_bevroi_corner: In the current frame, the corner point of the perception ROI at the center of the vehicle
ego_pose: In the current frame, the pose of the vehicle
yaw: angle of deviation from the starting point [x-axis]
vcs_bevroi_range_x: vcs bevroi perception range in x-axis
vcs_bevroi_range_y: vcs bevroi perception range in y-axis
ego_and_center_dist: the dist of ego pose and the geometric center of current perception roi
"""
curr_bevroi_corner = copy.deepcopy(curr_bevroi_corner_input)
center_point_x = ego_pose[0] + ego_and_center_dist * math.cos(yaw)
center_point_y = ego_pose[1] + ego_and_center_dist * math.sin(yaw)
curr_bevroi_corner[0] -= vcs_bevroi_range_x / 2.0
curr_bevroi_corner[1] -= vcs_bevroi_range_y / 2.0
curr_bevroi_corner[0] += center_point_x
curr_bevroi_corner[1] += center_point_y
corner_point_trans_x = (
(curr_bevroi_corner[0] - center_point_x) * math.cos(yaw)
-(curr_bevroi_corner[1] - center_point_y) * math.sin(yaw)
+ center_point_x
)
corner_point_trans_y = (
(curr_bevroi_corner[0] - center_point_x) * math.sin(yaw)
+ (curr_bevroi_corner[1] - center_point_y)* math.cos(yaw)
+ center_point_y
)
return [round(corner_point_trans_x), round(corner_point_trans_y)]3.复合变换
4.相机坐标系变换
5.Lidar与视觉坐标系转换

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐
 2
2 0
0- 0



 已为社区贡献4条内容
已为社区贡献4条内容

所有评论(0)