【完整源码+数据集+部署教程】车道区域分割车道线检测系统源码&数据集全套:改进yolo11-SEAMHead
【完整源码+数据集+部署教程】车道区域分割车道线检测系统源码&数据集全套:改进yolo11-SEAMHead
背景意义
随着城市化进程的加快,交通拥堵和交通事故频发已成为全球范围内亟待解决的问题。车道线检测作为自动驾驶和智能交通系统中的关键技术之一,能够有效提高车辆行驶的安全性和效率。传统的车道线检测方法多依赖于手工特征提取和简单的图像处理技术,然而,这些方法在复杂环境下的鲁棒性和准确性往往不足。因此,基于深度学习的车道线检测技术逐渐受到研究者的关注。
YOLO(You Only Look Once)系列模型因其高效的实时目标检测能力而广泛应用于各类视觉任务。YOLOv11作为该系列的最新版本,结合了更为先进的网络结构和训练策略,具备了更强的特征提取能力和更快的推理速度。然而,现有的YOLOv11模型在车道区域分割和车道线检测任务中的应用仍有待进一步优化。为此,本研究旨在基于改进的YOLOv11模型,开发一套高效的车道区域分割与车道线检测系统。
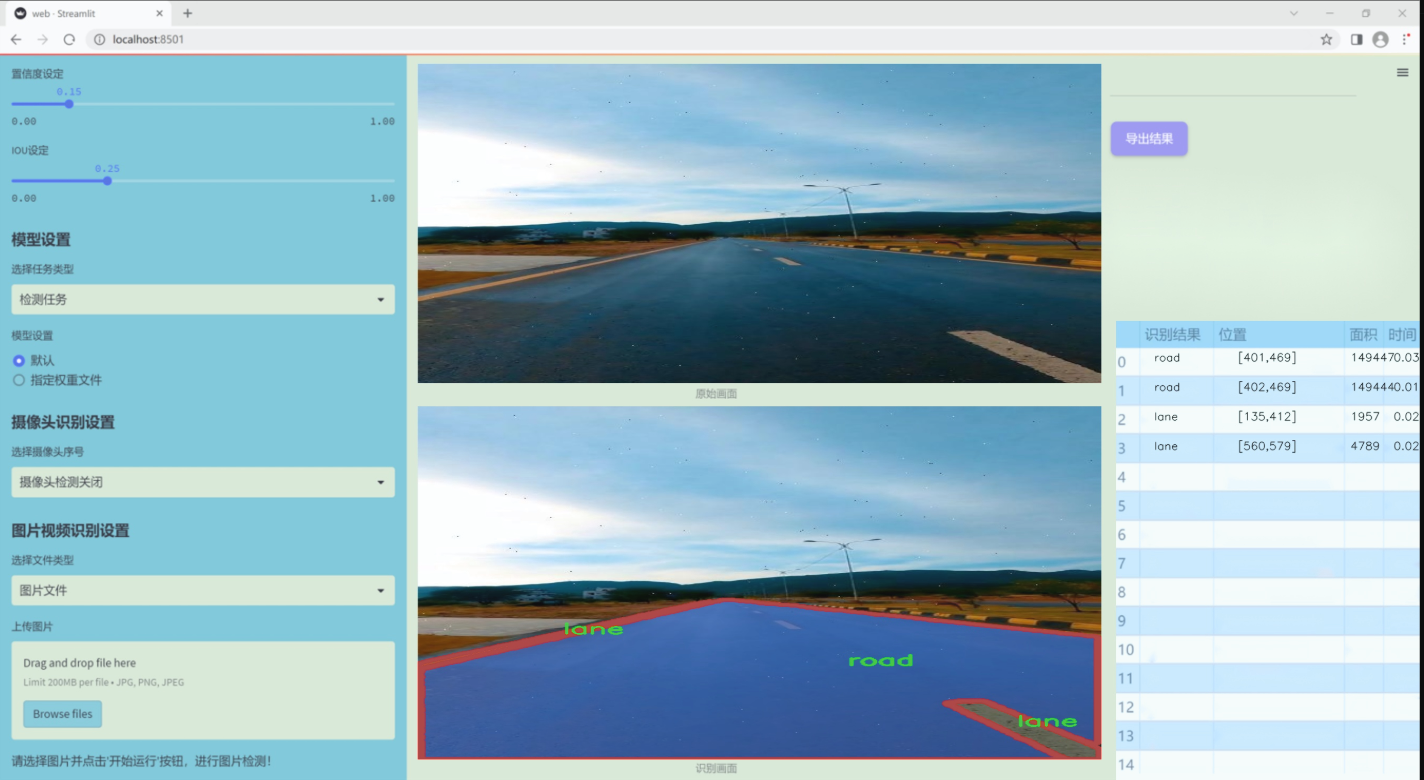
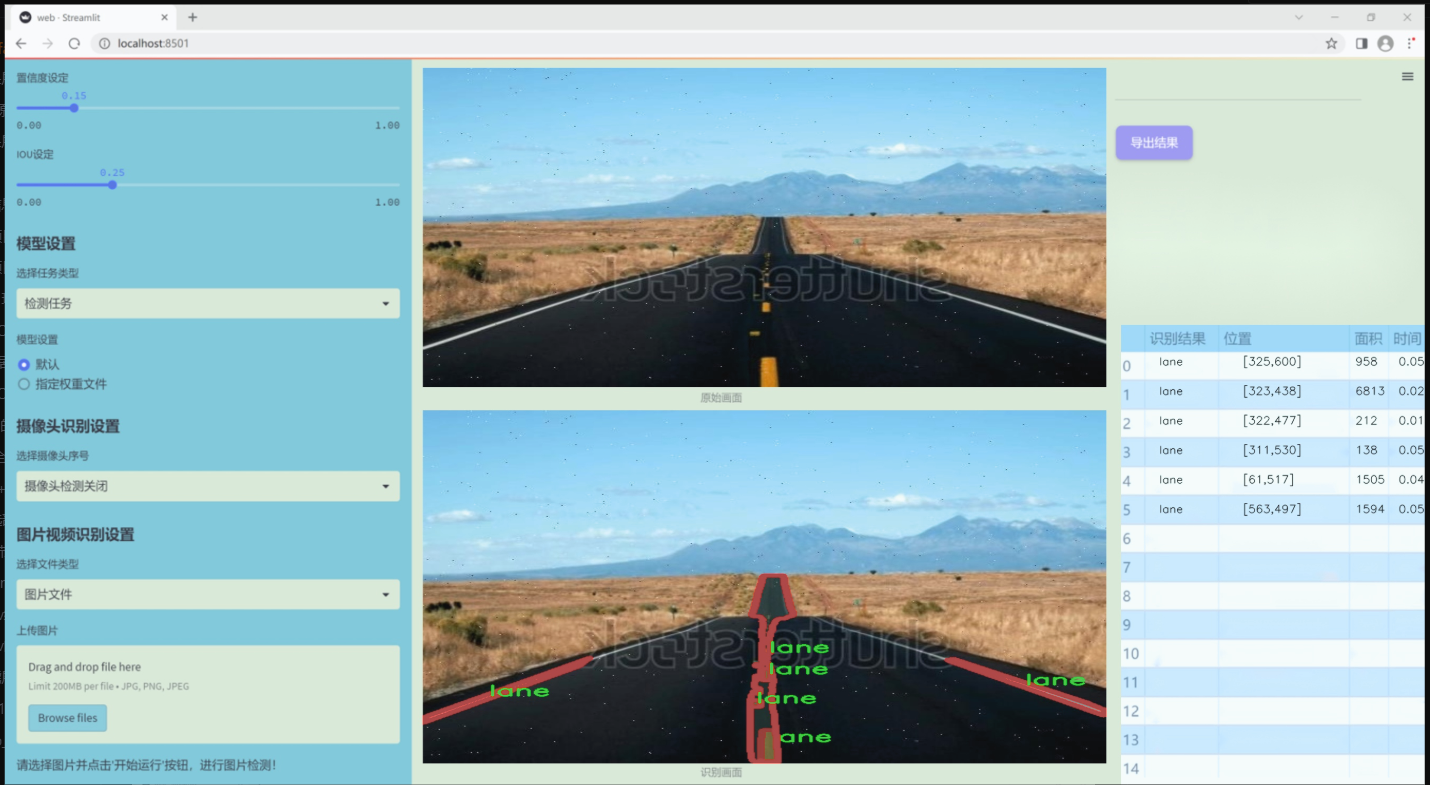
本项目所使用的数据集包含751张图像,专注于车道(lane)和道路(road)这两个类别。通过对这些图像进行实例分割,我们可以精确识别和分离车道线与道路背景,从而为后续的车道线检测提供更加可靠的基础。改进YOLOv11模型的关键在于优化其特征提取模块,以提高对复杂场景中车道线的检测精度。此外,利用实例分割技术,可以在保持高效性的同时,提升对车道区域的理解能力。
综上所述,本研究不仅具有重要的理论意义,也为智能交通系统的实际应用提供了可行的解决方案。通过提升车道线检测的准确性和实时性,能够有效减少交通事故的发生,改善交通流量,为构建安全、高效的智能交通环境奠定基础。
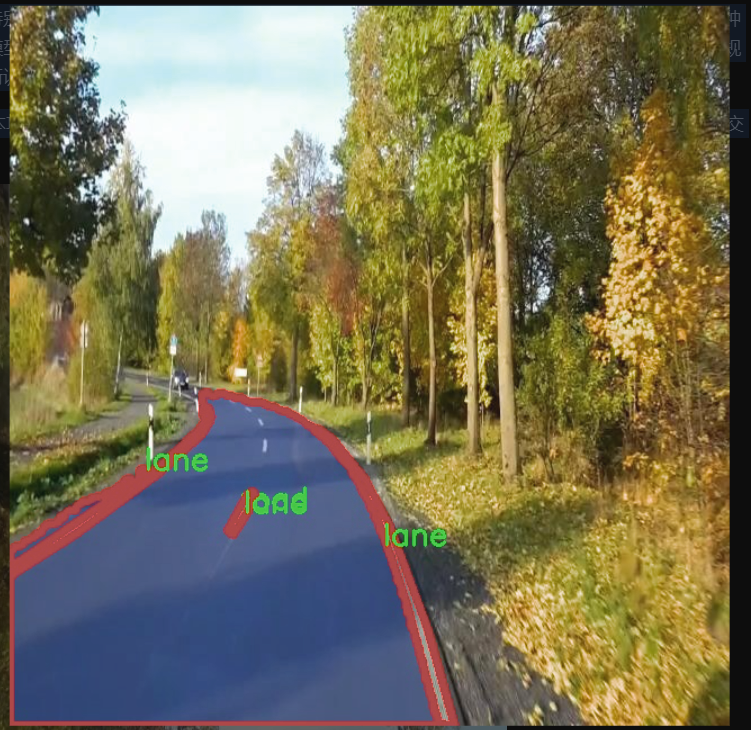
图片效果

数据集信息
本项目所使用的数据集名为“final2”,旨在为改进YOLOv11的车道区域分割及车道线检测系统提供高质量的训练数据。该数据集包含两类主要目标,分别为“lane”(车道线)和“road”(道路),总类别数量为2。这一精简的类别设置使得模型在训练过程中能够更加专注于车道线与道路的分割与识别,从而提高检测的准确性和效率。
“final2”数据集经过精心构建,涵盖了多种复杂的道路场景,包含城市街道、高速公路、乡村道路等多种环境,以确保模型在不同情况下的泛化能力。数据集中包含的图像经过标注,确保每一条车道线和道路区域都被准确识别,提供了丰富的样本供模型学习。这些图像不仅包括晴天的清晰视角,还涵盖了雨天、夜间等不同光照和天气条件下的场景,进一步增强了数据集的多样性。
在数据集的构建过程中,特别注重了标注的准确性和一致性,确保每个图像中的车道线和道路区域都经过严格审核。这种高质量的标注为YOLOv11模型的训练提供了坚实的基础,使其能够在实际应用中实现更高的检测精度。此外,数据集的规模也经过合理设计,以平衡训练时间和模型性能,使得训练过程既高效又不失准确性。
通过使用“final2”数据集,本项目旨在推动车道线检测技术的发展,提升自动驾驶系统的安全性和可靠性,为未来的智能交通系统奠定基础。



核心代码
以下是对给定代码的核心部分进行分析和详细注释的结果。我们将保留与 DiverseBranchBlock 相关的主要功能和结构,同时添加详细的中文注释。
import torch
import torch.nn as nn
import torch.nn.functional as F
定义DiverseBranchBlock模块
class DiverseBranchBlock(nn.Module):
def init(self, in_channels, out_channels, kernel_size,
stride=1, padding=None, dilation=1, groups=1,
internal_channels_1x1_3x3=None,
deploy=False, single_init=False):
super(DiverseBranchBlock, self).init()
self.deploy = deploy # 是否为部署模式
self.kernel_size = kernel_size # 卷积核大小
self.in_channels = in_channels # 输入通道数
self.out_channels = out_channels # 输出通道数
self.groups = groups # 分组卷积的组数
# 自动计算填充
if padding is None:
padding = (kernel_size // 2) # 对于卷积核大小为奇数时,padding为kernel_size的一半
assert padding == kernel_size // 2 # 确保padding是正确的
# 部署模式下直接使用卷积层
if deploy:
self.dbb_reparam = nn.Conv2d(in_channels=in_channels, out_channels=out_channels, kernel_size=kernel_size,
stride=stride, padding=padding, dilation=dilation, groups=groups, bias=True)
else:
# 非部署模式下构建多个分支
self.dbb_origin = self.conv_bn(in_channels, out_channels, kernel_size, stride, padding, dilation, groups)
# 平均池化分支
self.dbb_avg = nn.Sequential()
if groups < out_channels:
self.dbb_avg.add_module('conv',
nn.Conv2d(in_channels=in_channels, out_channels=out_channels, kernel_size=1,
stride=1, padding=0, groups=groups, bias=False))
self.dbb_avg.add_module('bn', nn.BatchNorm2d(out_channels))
self.dbb_avg.add_module('avg', nn.AvgPool2d(kernel_size=kernel_size, stride=stride, padding=0))
self.dbb_1x1 = self.conv_bn(in_channels, out_channels, kernel_size=1, stride=stride,
padding=0, groups=groups)
else:
self.dbb_avg.add_module('avg', nn.AvgPool2d(kernel_size=kernel_size, stride=stride, padding=padding))
self.dbb_avg.add_module('avgbn', nn.BatchNorm2d(out_channels))
# 1x1卷积和kxk卷积分支
if internal_channels_1x1_3x3 is None:
internal_channels_1x1_3x3 = in_channels if groups < out_channels else 2 * in_channels
self.dbb_1x1_kxk = nn.Sequential()
self.dbb_1x1_kxk.add_module('conv1', nn.Conv2d(in_channels=in_channels, out_channels=internal_channels_1x1_3x3,
kernel_size=1, stride=1, padding=0, groups=groups, bias=False))
self.dbb_1x1_kxk.add_module('bn1', nn.BatchNorm2d(internal_channels_1x1_3x3))
self.dbb_1x1_kxk.add_module('conv2', nn.Conv2d(in_channels=internal_channels_1x1_3x3, out_channels=out_channels,
kernel_size=kernel_size, stride=stride, padding=0, groups=groups, bias=False))
self.dbb_1x1_kxk.add_module('bn2', nn.BatchNorm2d(out_channels))
# 初始化参数
if single_init:
self.single_init()
def conv_bn(self, in_channels, out_channels, kernel_size, stride=1, padding=0, dilation=1, groups=1):
"""构建卷积层和批归一化层的组合"""
conv_layer = nn.Conv2d(in_channels=in_channels, out_channels=out_channels, kernel_size=kernel_size,
stride=stride, padding=padding, dilation=dilation, groups=groups, bias=False)
bn_layer = nn.BatchNorm2d(num_features=out_channels, affine=True)
return nn.Sequential(conv_layer, bn_layer)
def forward(self, inputs):
"""前向传播"""
if hasattr(self, 'dbb_reparam'):
return self.dbb_reparam(inputs) # 如果在部署模式下,直接使用重参数化的卷积层
# 否则使用原始分支进行计算
out = self.dbb_origin(inputs) # 原始卷积分支
if hasattr(self, 'dbb_1x1'):
out += self.dbb_1x1(inputs) # 1x1卷积分支
out += self.dbb_avg(inputs) # 平均池化分支
out += self.dbb_1x1_kxk(inputs) # kxk卷积分支
return out # 返回最终的输出
def single_init(self):
"""单一初始化方法"""
self.init_gamma(0.0) # 将gamma初始化为0
if hasattr(self, "dbb_origin"):
nn.init.constant_(self.dbb_origin[0].weight, 1.0) # 将原始卷积的权重初始化为1
def init_gamma(self, gamma_value):
"""初始化gamma值"""
if hasattr(self, "dbb_origin"):
nn.init.constant_(self.dbb_origin[1].weight, gamma_value) # 初始化批归一化的权重
if hasattr(self, "dbb_1x1"):
nn.init.constant_(self.dbb_1x1[1].weight, gamma_value)
if hasattr(self, "dbb_avg"):
nn.init.constant_(self.dbb_avg[1].weight, gamma_value)
if hasattr(self, "dbb_1x1_kxk"):
nn.init.constant_(self.dbb_1x1_kxk[1].weight, gamma_value)
代码分析
DiverseBranchBlock 类: 该类是一个神经网络模块,主要用于构建具有多种卷积分支的网络结构。
构造函数: 在构造函数中,模块根据输入参数初始化卷积层、批归一化层和其他分支。
前向传播: 在 forward 方法中,模块计算输入的输出,通过不同的分支组合最终的结果。
参数初始化: 提供了单一初始化和 gamma 值初始化的方法,以便于模型训练时的稳定性。
总结
以上代码展示了一个复杂的卷积神经网络模块的实现,具有多种分支结构,适用于不同的任务。通过合理的参数初始化和模块组合,可以有效提高模型的性能。
这个文件 rep_block.py 定义了一些用于构建神经网络中多样化分支块的类和函数,主要使用 PyTorch 框架。文件中包含多个类和函数,它们的主要目的是实现不同类型的卷积操作和相应的批归一化(Batch Normalization),以提高网络的表现。
首先,文件导入了必要的库,包括 PyTorch 的核心库和一些自定义模块。接着,定义了一些用于卷积和批归一化的转换函数。这些函数的作用包括将卷积核和批归一化的参数融合、添加分支卷积、处理不同大小的卷积核等。这些转换函数为后续的卷积块提供了灵活的操作方式。
接下来,定义了几个主要的类:
IdentityBasedConv1x1:这个类实现了一个基于身份映射的 1x1 卷积层。它通过将卷积核初始化为单位矩阵的形式来保留输入特征,同时允许通过卷积操作进行学习。这个类的 forward 方法实现了前向传播,并且提供了获取实际卷积核的功能。
BNAndPadLayer:这个类结合了批归一化和填充操作。它在前向传播时先进行批归一化,然后根据需要进行填充,确保输出的特征图在空间维度上保持一致。
DiverseBranchBlock:这是一个多样化分支块的实现,包含多个卷积分支。它的构造函数允许用户定义输入输出通道、卷积核大小、步幅、填充等参数。该类在前向传播时会将多个分支的输出相加,并通过非线性激活函数进行处理。
DiverseBranchBlockNOAct:这个类与 DiverseBranchBlock 类似,但不包含非线性激活函数。它的设计使得在某些情况下可以更灵活地使用。
DeepDiverseBranchBlock 和 WideDiverseBranchBlock:这两个类扩展了 DiverseBranchBlock 的功能,分别实现了更深和更宽的分支结构,适用于不同的网络架构需求。它们都支持部署模式,并在前向传播中结合了多个卷积分支的输出。
这些类和函数的设计旨在提供灵活性和可扩展性,使得用户可以根据具体的任务需求构建复杂的卷积神经网络结构。整体来看,文件中的实现充分利用了 PyTorch 的模块化特性,允许用户方便地组合和修改不同的卷积块,以达到更好的性能。
10.2 mamba_yolo.py
以下是代码中最核心的部分,并附上详细的中文注释:
import torch
import torch.nn as nn
from einops import rearrange
class LayerNorm2d(nn.Module):
“”“二维层归一化”“”
def init(self, normalized_shape, eps=1e-6, elementwise_affine=True):
super().init()
self.norm = nn.LayerNorm(normalized_shape, eps, elementwise_affine)
def forward(self, x):
# 将输入张量从 (B, C, H, W) 转换为 (B, H, W, C)
x = rearrange(x, 'b c h w -> b h w c').contiguous()
# 进行层归一化
x = self.norm(x)
# 将张量转换回 (B, C, H, W)
x = rearrange(x, 'b h w c -> b c h w').contiguous()
return x
class CrossScan(torch.autograd.Function):
“”“交叉扫描操作”“”
@staticmethod
def forward(ctx, x: torch.Tensor):
B, C, H, W = x.shape
ctx.shape = (B, C, H, W)
xs = x.new_empty((B, 4, C, H * W))
# 将输入张量展平并存储不同的变换
xs[:, 0] = x.flatten(2, 3) # 原始顺序
xs[:, 1] = x.transpose(dim0=2, dim1=3).flatten(2, 3) # 转置后的顺序
xs[:, 2:4] = torch.flip(xs[:, 0:2], dims=[-1]) # 反转顺序
return xs
@staticmethod
def backward(ctx, ys: torch.Tensor):
B, C, H, W = ctx.shape
L = H * W
# 反向传播时合并不同的梯度
ys = ys[:, 0:2] + ys[:, 2:4].flip(dims=[-1]).view(B, 2, -1, L)
y = ys[:, 0] + ys[:, 1].view(B, -1, W, H).transpose(dim0=2, dim1=3).contiguous().view(B, -1, L)
return y.view(B, -1, H, W)
class SelectiveScanCore(torch.autograd.Function):
“”“选择性扫描核心操作”“”
@staticmethod
@torch.cuda.amp.custom_fwd
def forward(ctx, u, delta, A, B, C, D=None, delta_bias=None, delta_softplus=False, nrows=1, backnrows=1):
# 确保输入张量是连续的
if u.stride(-1) != 1:
u = u.contiguous()
if delta.stride(-1) != 1:
delta = delta.contiguous()
if D is not None and D.stride(-1) != 1:
D = D.contiguous()
if B.stride(-1) != 1:
B = B.contiguous()
if C.stride(-1) != 1:
C = C.contiguous()
# 保存输入张量以备反向传播使用
ctx.delta_softplus = delta_softplus
ctx.backnrows = backnrows
out, x, *rest = selective_scan_cuda_core.fwd(u, delta, A, B, C, D, delta_bias, delta_softplus, 1)
ctx.save_for_backward(u, delta, A, B, C, D, delta_bias, x)
return out
@staticmethod
@torch.cuda.amp.custom_bwd
def backward(ctx, dout, *args):
u, delta, A, B, C, D, delta_bias, x = ctx.saved_tensors
if dout.stride(-1) != 1:
dout = dout.contiguous()
# 反向传播时计算梯度
du, ddelta, dA, dB, dC, dD, ddelta_bias, *rest = selective_scan_cuda_core.bwd(
u, delta, A, B, C, D, delta_bias, dout, x, ctx.delta_softplus, 1
)
return (du, ddelta, dA, dB, dC, dD, ddelta_bias, None, None, None, None)
def cross_selective_scan(x: torch.Tensor, x_proj_weight: torch.Tensor, dt_projs_weight: torch.Tensor, A_logs: torch.Tensor, Ds: torch.Tensor, out_norm: torch.nn.Module = None):
“”“交叉选择性扫描操作”“”
B, D, H, W = x.shape
L = H * W
xs = CrossScan.apply(x) # 进行交叉扫描
x_dbl = torch.einsum("b k d l, k c d -> b k c l", xs, x_proj_weight) # 计算投影
dts, Bs, Cs = torch.split(x_dbl, [R, N, N], dim=2) # 分割张量
dts = torch.einsum("b k r l, k d r -> b k d l", dts, dt_projs_weight) # 进一步计算
# 进行选择性扫描
ys: torch.Tensor = SelectiveScan.apply(xs, dts, A_logs, Bs, Cs, Ds, None, True).view(B, K, -1, H, W)
y: torch.Tensor = CrossMerge.apply(ys) # 合并结果
# 进行输出归一化
if out_norm is not None:
y = out_norm(y.view(B, -1, H, W)).permute(0, 2, 3, 1) # (B, H, W, C)
return y
class SS2D(nn.Module):
“”“SS2D模块”“”
def init(self, d_model=96, d_state=16, ssm_ratio=2.0, ssm_rank_ratio=2.0, act_layer=nn.SiLU, dropout=0.0):
super().init()
self.in_proj = nn.Conv2d(d_model, int(ssm_ratio * d_model), kernel_size=1, bias=False)
self.out_proj = nn.Conv2d(int(ssm_ratio * d_model), d_model, kernel_size=1, bias=False)
self.dropout = nn.Dropout(dropout) if dropout > 0. else nn.Identity()
self.act = act_layer()
def forward(self, x: torch.Tensor):
x = self.in_proj(x) # 输入投影
x = self.act(x) # 激活函数
x = self.dropout(x) # 应用dropout
x = self.out_proj(x) # 输出投影
return x
class VSSBlock_YOLO(nn.Module):
“”“VSSBlock模块”“”
def init(self, in_channels: int, hidden_dim: int, drop_path: float):
super().init()
self.proj_conv = nn.Conv2d(in_channels, hidden_dim, kernel_size=1, bias=True)
self.ss2d = SS2D(d_model=hidden_dim) # 使用SS2D模块
self.drop_path = DropPath(drop_path)
def forward(self, input: torch.Tensor):
input = self.proj_conv(input) # 投影
x = self.ss2d(input) # 通过SS2D模块
x = input + self.drop_path(x) # 残差连接
return x
代码核心部分解释:
LayerNorm2d: 实现了二维层归一化,适用于图像数据的归一化处理。
CrossScan: 定义了交叉扫描操作,主要用于在前向传播中对输入张量进行不同变换并存储。
SelectiveScanCore: 实现了选择性扫描的前向和反向传播逻辑,核心功能是根据输入进行选择性计算。
cross_selective_scan: 组合了交叉扫描和选择性扫描的操作,完成输入的投影和输出的归一化。
SS2D: 该模块实现了输入的投影、激活和输出的处理,作为核心模块之一。
VSSBlock_YOLO: 这是一个完整的块,结合了投影、选择性扫描和残差连接,形成一个高效的特征提取单元。
这些核心部分构成了整个模型的基础,负责输入的处理、特征的提取和最终的输出。
这个程序文件 mamba_yolo.py 是一个用于构建深度学习模型的 PyTorch 实现,主要用于计算机视觉任务,特别是与 YOLO(You Only Look Once)相关的目标检测模型。文件中包含多个类和函数,主要实现了不同的神经网络模块和操作。
首先,文件导入了一些必要的库,包括 PyTorch、数学运算、函数式编程工具和类型注解。它还尝试导入一些 CUDA 相关的模块,用于加速计算。
文件中定义了一个 LayerNorm2d 类,它是对 2D 数据进行层归一化的实现。该类的 forward 方法将输入张量的维度进行调整,以适应 nn.LayerNorm 的要求。
接下来,定义了一个 autopad 函数,用于自动计算卷积操作的填充,以确保输出形状与输入形状相同。
文件中还实现了多个自定义的 PyTorch 操作,包括 CrossScan 和 CrossMerge,它们分别用于处理输入张量的交叉扫描和合并。这些操作在神经网络中用于处理特征图,以提高模型的表达能力。
SelectiveScanCore 类实现了选择性扫描的核心功能,这是一种特殊的操作,用于在深度学习模型中处理序列数据。该类的 forward 和 backward 方法分别实现了前向传播和反向传播的逻辑。
cross_selective_scan 函数是一个高层次的接口,用于执行选择性扫描操作,并提供了一些参数以控制其行为。它处理输入数据并通过多个线性变换和选择性扫描操作生成输出。
接下来,定义了 SS2D 类,这是一个基于选择性扫描的 2D 模块,包含多个参数和层,包括卷积层、线性层和激活函数。该模块的 forward 方法实现了数据的前向传播。
RGBlock 和 LSBlock 类分别实现了不同的块结构,包含卷积层、激活函数和跳跃连接,旨在提高特征提取的能力。
XSSBlock 和 VSSBlock_YOLO 类则是更复杂的模块,结合了选择性扫描和其他结构,形成了更深层次的网络组件。这些模块通常用于构建更大的网络架构,如 YOLO 模型。
SimpleStem 类实现了一个简单的网络前端,通常用于处理输入图像并提取初步特征。它包含两个卷积层和相应的归一化和激活层。
最后,VisionClueMerge 类实现了特征合并的功能,通常用于将不同层次的特征进行融合,以便于后续的处理。
整体来看,这个文件实现了一个复杂的深度学习模型结构,结合了多种现代神经网络技术,适用于计算机视觉任务,特别是目标检测。每个模块和操作都经过精心设计,以提高模型的性能和效率。
10.3 mamba_vss.py
以下是代码中最核心的部分,并附上详细的中文注释:
import torch
import torch.nn as nn
import torch.nn.functional as F
class SS2D(nn.Module):
def init(self, d_model, d_state=16, d_conv=3, expand=2, dropout=0., bias=False):
super().init()
self.d_model = d_model # 输入特征的维度
self.d_state = d_state # 状态的维度
self.d_conv = d_conv # 卷积核的大小
self.expand = expand # 扩展因子
self.d_inner = int(self.expand * self.d_model) # 内部特征维度
# 输入投影层,将输入特征映射到更高维度
self.in_proj = nn.Linear(self.d_model, self.d_inner * 2, bias=bias)
# 卷积层,进行特征提取
self.conv2d = nn.Conv2d(
in_channels=self.d_inner,
out_channels=self.d_inner,
groups=self.d_inner,
bias=bias,
kernel_size=d_conv,
padding=(d_conv - 1) // 2,
)
self.act = nn.SiLU() # 激活函数
# 输出层,最终将特征映射回原始维度
self.out_proj = nn.Linear(self.d_inner, self.d_model, bias=bias)
self.dropout = nn.Dropout(dropout) if dropout > 0. else None # dropout层
def forward(self, x: torch.Tensor):
# 前向传播函数
B, H, W, C = x.shape # 获取输入的形状
xz = self.in_proj(x) # 输入投影
x, z = xz.chunk(2, dim=-1) # 将投影结果分为两个部分
x = x.permute(0, 3, 1, 2).contiguous() # 调整维度以适应卷积层
x = self.act(self.conv2d(x)) # 经过卷积和激活函数
y = self.forward_core(x) # 经过核心计算
y = y * F.silu(z) # 使用z进行加权
out = self.out_proj(y) # 输出投影
if self.dropout is not None:
out = self.dropout(out) # 应用dropout
return out
def forward_core(self, x: torch.Tensor):
# 核心计算逻辑
B, C, H, W = x.shape
L = H * W # 计算总的空间维度
# 进行特征处理和状态更新的计算
# 这里省略了具体的实现细节,假设有复杂的状态更新逻辑
return y # 返回处理后的特征
class VSSBlock(nn.Module):
def init(self, hidden_dim: int = 0, drop_path: float = 0.2):
super().init()
self.ln_1 = nn.LayerNorm(hidden_dim) # 归一化层
self.self_attention = SS2D(d_model=hidden_dim) # 自注意力机制
self.drop_path = nn.Dropout(drop_path) # DropPath层
def forward(self, input: torch.Tensor):
input = input.permute((0, 2, 3, 1)) # 调整输入维度
x = input + self.drop_path(self.self_attention(self.ln_1(input))) # 残差连接
return x.permute((0, 3, 1, 2)) # 调整输出维度
示例代码
if name == ‘main’:
inputs = torch.randn((1, 64, 32, 32)).cuda() # 随机输入
model = VSSBlock(64).cuda() # 创建模型
pred = model(inputs) # 前向传播
print(pred.size()) # 输出结果的形状
代码说明:
SS2D类:实现了一个自注意力机制的模块,包含输入投影、卷积层和输出投影。核心计算逻辑在forward_core方法中实现。
VSSBlock类:使用SS2D作为自注意力机制,并结合了LayerNorm和DropPath进行处理,形成一个完整的块结构。
前向传播:在forward方法中,输入经过投影、卷积、注意力计算和输出投影,最终返回处理后的特征。
该代码实现了一个复杂的自注意力机制模块,适用于深度学习模型中的特征提取和状态更新。
这个程序文件 mamba_vss.py 定义了几个深度学习模块,主要包括 SS2D、VSSBlock 和 Mamba2Block。这些模块主要用于构建具有自注意力机制的神经网络,特别是在处理时序数据或图像数据时。以下是对代码的详细说明。
首先,文件导入了一些必要的库,包括 PyTorch 及其神经网络模块、数学库、Einops(用于张量重排)、以及一些自定义的模块和函数。文件的开头部分尝试导入一些可能存在的外部模块,如果导入失败则不抛出错误。
SS2D 类是一个核心模块,主要实现了一个带有自注意力机制的神经网络单元。它的构造函数接受多个参数,包括模型的维度、状态维度、卷积核大小、扩展因子等。该类内部定义了多个线性层和卷积层,用于处理输入数据。dt_init、A_log_init 和 D_init 是一些静态方法,用于初始化模型的参数。
在 forward_corev0 方法中,输入数据经过一系列的张量操作和变换,最终通过选择性扫描函数进行处理。这一过程涉及到多个张量的分割、重组和线性变换,目的是提取特征并进行状态更新。最后,输出经过层归一化处理后返回。
VSSBlock 类是一个更高层次的模块,它在 SS2D 的基础上添加了层归一化和残差连接。它的构造函数初始化了归一化层和自注意力层,并实现了前向传播方法,处理输入数据并返回经过处理的结果。
Mamba2Block 类是 VSSBlock 的一个子类,重写了自注意力层,使用了 Mamba2Simple 模块。它的前向传播方法与 VSSBlock 类似,但在处理输入时进行了不同的张量变换。
在文件的最后部分,有一个测试代码块,创建了随机输入数据,并实例化了 VSSBlock 和 Mamba2Block 模型,进行前向传播并打印输出的尺寸。这部分代码用于验证模型的构建和功能是否正常。
整体来看,这个文件实现了一个复杂的自注意力机制模块,适用于时序数据或图像数据的处理,具有良好的灵活性和可扩展性。
10.4 val.py
以下是代码中最核心的部分,并附上详细的中文注释:
class DetectionValidator(BaseValidator):
“”"
扩展自 BaseValidator 类的检测模型验证器。
用于评估 YOLO 模型的性能。
“”"
def __init__(self, dataloader=None, save_dir=None, pbar=None, args=None, _callbacks=None):
"""初始化检测模型所需的变量和设置。"""
super().__init__(dataloader, save_dir, pbar, args, _callbacks)
self.metrics = DetMetrics(save_dir=self.save_dir, on_plot=self.on_plot) # 初始化检测指标
self.iouv = torch.linspace(0.5, 0.95, 10) # 定义 mAP@0.5:0.95 的 IoU 向量
self.niou = self.iouv.numel() # IoU 的数量
def preprocess(self, batch):
"""对 YOLO 训练的图像批次进行预处理。"""
batch["img"] = batch["img"].to(self.device, non_blocking=True) # 将图像转移到设备上
batch["img"] = (batch["img"].half() if self.args.half else batch["img"].float()) / 255 # 归一化图像
for k in ["batch_idx", "cls", "bboxes"]:
batch[k] = batch[k].to(self.device) # 将其他数据转移到设备上
return batch # 返回处理后的批次
def postprocess(self, preds):
"""对预测输出应用非极大值抑制(NMS)。"""
return ops.non_max_suppression(
preds,
self.args.conf,
self.args.iou,
multi_label=True,
agnostic=self.args.single_cls,
max_det=self.args.max_det,
) # 返回经过 NMS 处理的预测结果
def update_metrics(self, preds, batch):
"""更新指标统计信息。"""
for si, pred in enumerate(preds):
self.seen += 1 # 更新已处理的样本数量
npr = len(pred) # 当前预测的数量
pbatch = self._prepare_batch(si, batch) # 准备当前批次的数据
cls, bbox = pbatch.pop("cls"), pbatch.pop("bbox") # 获取真实标签和边界框
if npr == 0: # 如果没有预测结果
continue # 跳过
predn = self._prepare_pred(pred, pbatch) # 准备预测结果
# 评估预测结果
stat["tp"] = self._process_batch(predn, bbox, cls) # 计算真阳性
for k in self.stats.keys():
self.stats[k].append(stat[k]) # 更新统计信息
def get_stats(self):
"""返回指标统计信息和结果字典。"""
stats = {k: torch.cat(v, 0).cpu().numpy() for k, v in self.stats.items()} # 转换为 numpy 数组
if len(stats) and stats["tp"].any():
self.metrics.process(**stats) # 处理指标
return self.metrics.results_dict # 返回结果字典
def print_results(self):
"""打印每个类别的训练/验证集指标。"""
pf = "%22s" + "%11i" * 2 + "%11.3g" * len(self.metrics.keys) # 打印格式
LOGGER.info(pf % ("all", self.seen, self.nt_per_class.sum(), *self.metrics.mean_results())) # 打印总结果
# 打印每个类别的结果
if self.args.verbose and not self.training and self.nc > 1 and len(self.stats):
for i, c in enumerate(self.metrics.ap_class_index):
LOGGER.info(pf % (self.names[c], self.seen, self.nt_per_class[c], *self.metrics.class_result(i))) # 打印每个类别的详细结果
代码核心部分解释:
DetectionValidator 类:这是一个用于验证 YOLO 模型性能的类,继承自 BaseValidator。
init 方法:初始化一些重要的变量和设置,包括检测指标和 IoU 向量。
preprocess 方法:对输入的图像批次进行预处理,包括设备转移和归一化。
postprocess 方法:应用非极大值抑制(NMS)来过滤掉冗余的预测框。
update_metrics 方法:更新模型的性能指标,计算真阳性等统计信息。
get_stats 方法:返回当前的统计信息和结果字典。
print_results 方法:打印训练和验证集的指标结果,包括每个类别的详细信息。
这些部分是 YOLO 模型验证的核心逻辑,负责处理数据、更新指标并输出结果。
这个程序文件 val.py 是一个用于目标检测模型验证的类,继承自 BaseValidator。它主要用于在训练过程中评估 YOLO(You Only Look Once)模型的性能,特别是在 COCO 数据集上的表现。程序的核心功能包括数据预处理、指标计算、结果输出等。
在初始化方法中,类会设置一些必要的变量和参数,例如验证数据加载器、保存目录、进度条、命令行参数等。它还会初始化一些指标,比如目标检测的 mAP(平均精度)和混淆矩阵。
preprocess 方法负责对输入的图像批次进行预处理,包括将图像转换为适合模型输入的格式,以及根据需要进行归一化处理。此方法还会为自动标注准备标签。
init_metrics 方法用于初始化评估指标,检查数据集是否为 COCO 格式,并设置相应的类映射和指标名称。
postprocess 方法应用非极大值抑制(NMS)来处理模型的预测输出,以减少重叠的边界框。
_prepare_batch 和 _prepare_pred 方法分别用于准备真实标签和模型预测的边界框,以便后续的评估。
update_metrics 方法负责更新当前批次的评估指标,包括计算真阳性、预测类别等。它还会根据需要将预测结果保存为 JSON 或 TXT 格式。
finalize_metrics 方法在所有批次处理完成后设置最终的指标值,包括计算速度和混淆矩阵。
get_stats 方法返回当前的评估统计数据,并计算每个类别的目标数量。
print_results 方法负责打印每个类别的评估结果,包括图像数量、实例数量和各类指标。
_process_batch 方法计算预测与真实标签之间的匹配情况,返回正确预测的矩阵。
build_dataset 和 get_dataloader 方法用于构建数据集和数据加载器,以便于后续的验证过程。
plot_val_samples 和 plot_predictions 方法用于可视化验证样本和模型预测结果,生成图像并保存。
save_one_txt 方法将 YOLO 检测结果保存为 TXT 文件,格式为归一化坐标。
pred_to_json 方法将预测结果序列化为 COCO JSON 格式,以便后续评估。
eval_json 方法用于评估 YOLO 输出的 JSON 格式结果,并返回性能统计数据,利用 pycocotools 计算 mAP。
整体来看,这个文件实现了一个完整的目标检测模型验证流程,涵盖了数据处理、指标计算、结果输出和可视化等多个方面,旨在帮助用户评估 YOLO 模型在特定数据集上的性能。
源码文件
源码获取
欢迎大家点赞、收藏、关注、评论啦 、查看👇🏻获取联系方式👇🏻

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐
 13
13 0
0- 0



 已为社区贡献12条内容
已为社区贡献12条内容

所有评论(0)