【图形学】pitch、yaw、roll三个角的区别(yaw angle 偏航角,steering angle 航向角的解释)
(2020aMATLAB中Parking Valet Using Nonlinear Model Predictive Control):下一个时刻要转的角度=w * Ts。
·
【图形学】pitch、yaw、roll三个角的区别(yaw angle 偏航角,steering angle 航向角的解释)
以下分析以此坐标系为标准: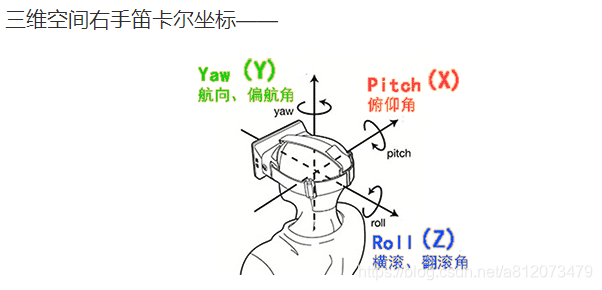
Z轴正方向为前进方向
-
pitch():俯仰,将物体绕X轴旋转(localRotationX)
-
yaw():航向,将物体绕Y轴旋转(localRotationY)
-
roll():横滚,将物体绕Z轴旋转(localRotationZ)
yaw angle 偏航角
steering angle 航向角:下一个时刻要转的角度=w * Ts
例如:用MPC自动停车导航的例子(2020aMATLAB中Parking Valet Using Nonlinear Model Predictive Control)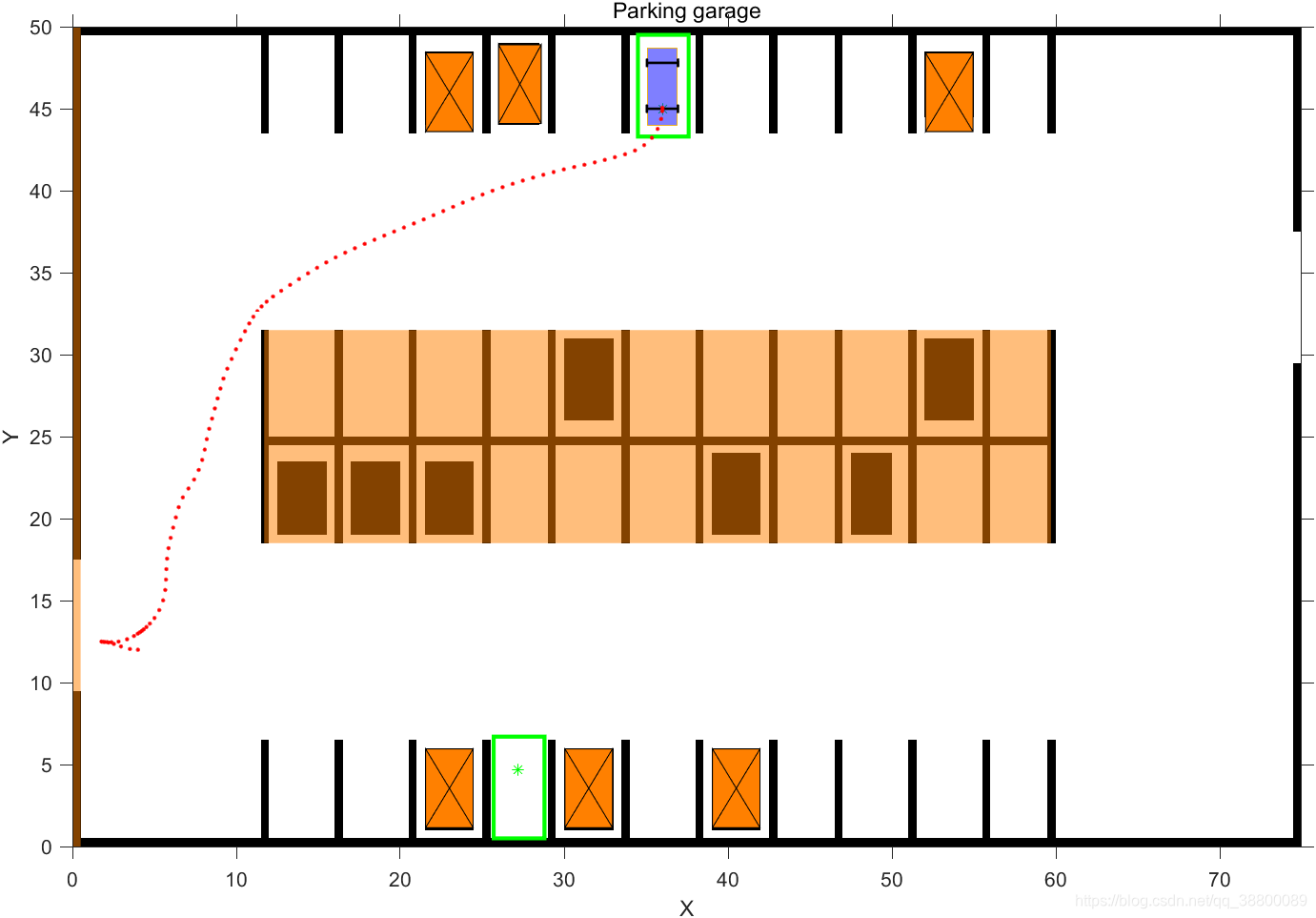
初始位置yaw angle=0,到目标位置yaw angle=90的一个仿真过程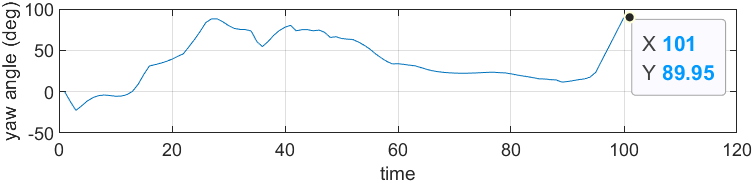
当到达目标位置的时候:steering angle=0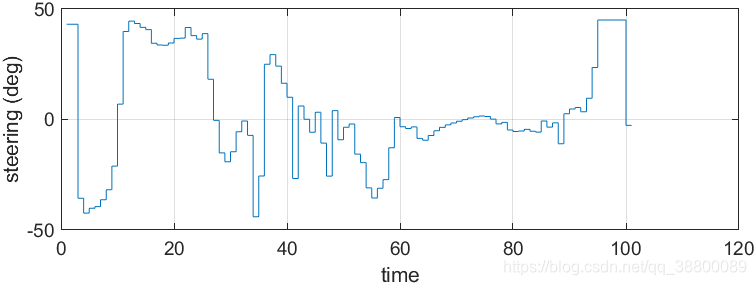

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐

 0
0 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)