法奥机器人学习使用
SocketOpen(ip,port,“socket_0”)// 通道号(“socket_0”、“socket_1”、“socket_2”、“socket_3”)”,“socket_0”,0)// 是否阻塞(0:阻塞;n,svar = SocketReadAsciiFloat(1,“socket_0”,0)//n=1,表示成功返回,svar返回的值,1读取的数据数量。对机器人末端安装的工具进行标定
1 视频课程
2 学习工具
虚拟机环境
3 拖动锁定
限制拖动模式下机器人的各向自由度,为0则可以自由拖动。
4 工具坐标
对机器人末端安装的工具进行标定:拖动机器人以不同姿态多次前往同一个点;
6点法相对4点法还会标定姿态;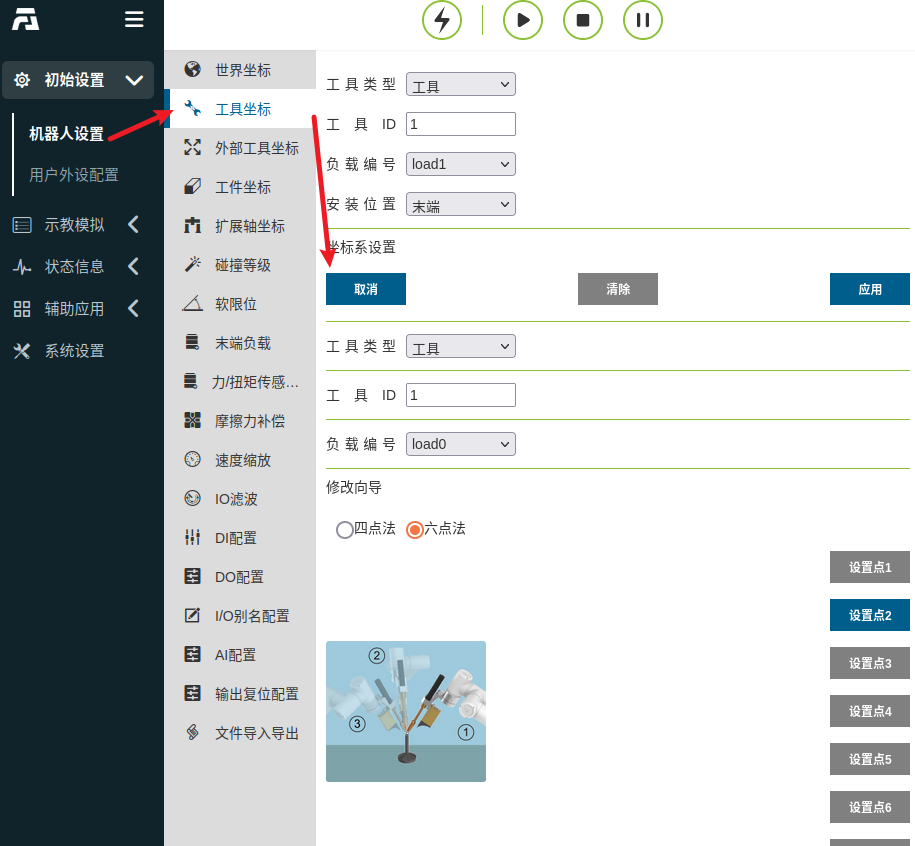
5 矩阵运动功能—码垛

6 单点螺旋线
提前标定螺旋线起点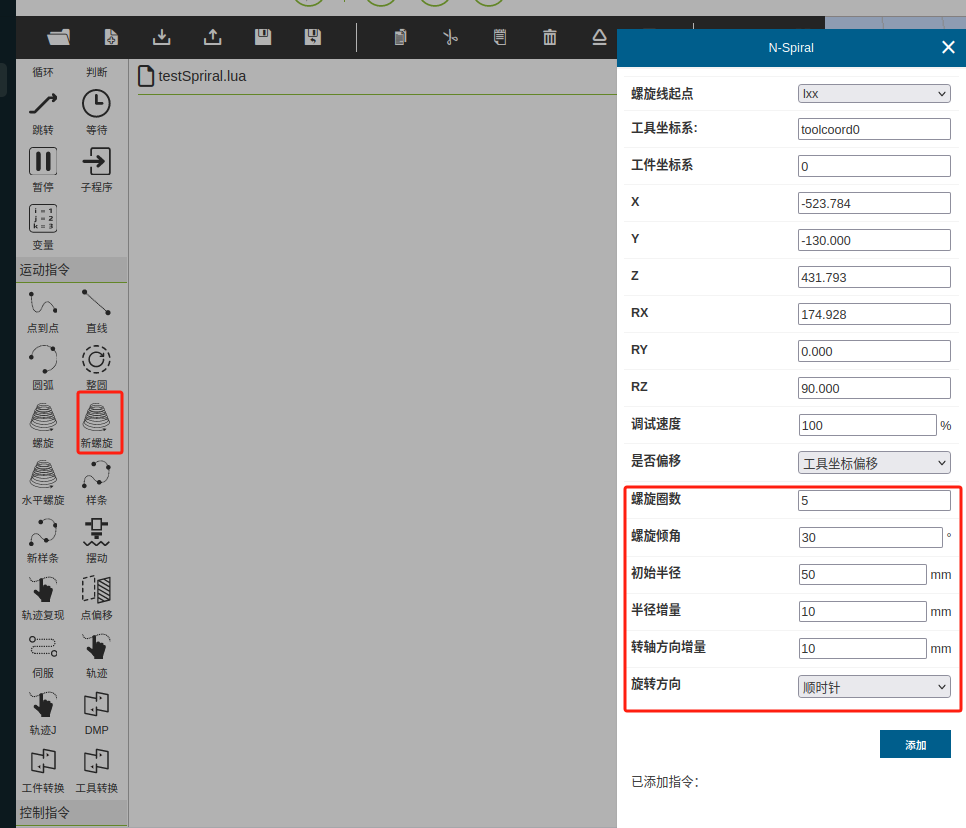
轨迹绘制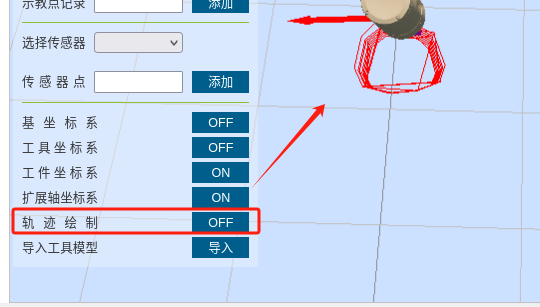
7 版本号及软件升级
查看软件版本号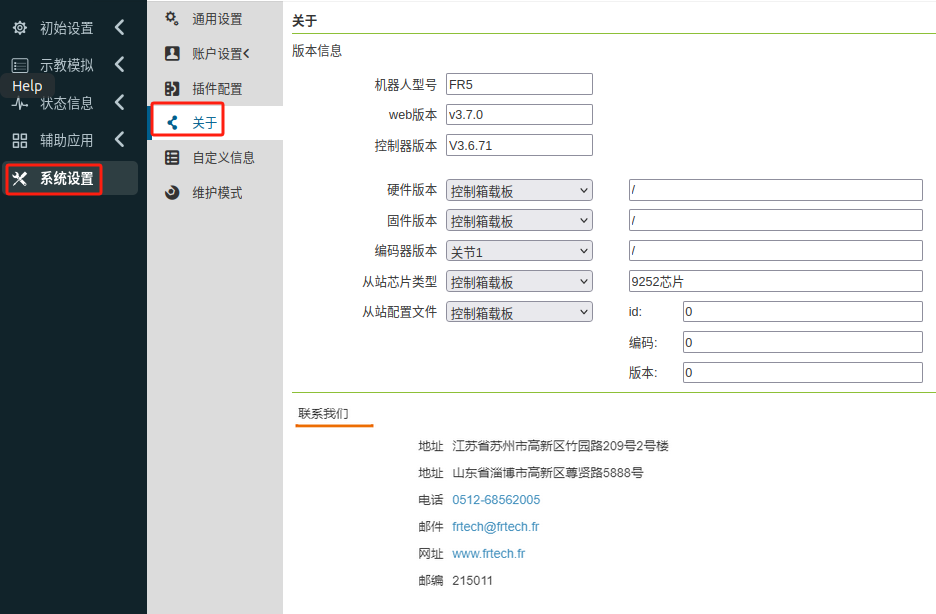
快速备份复制或应用机器人数据
软件升级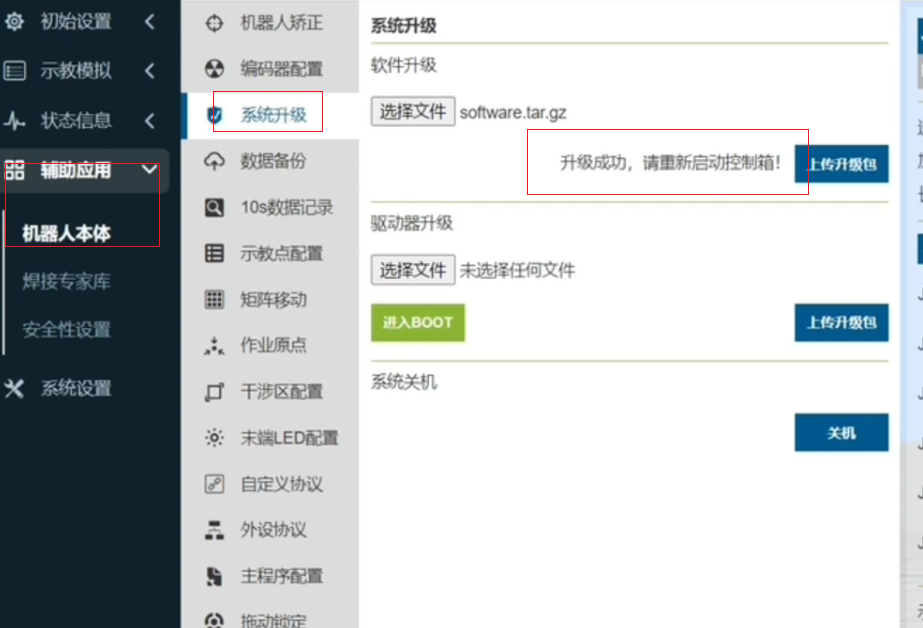
8 工件坐标系
原点-x轴-z轴
原点 - X轴 - XY正平面
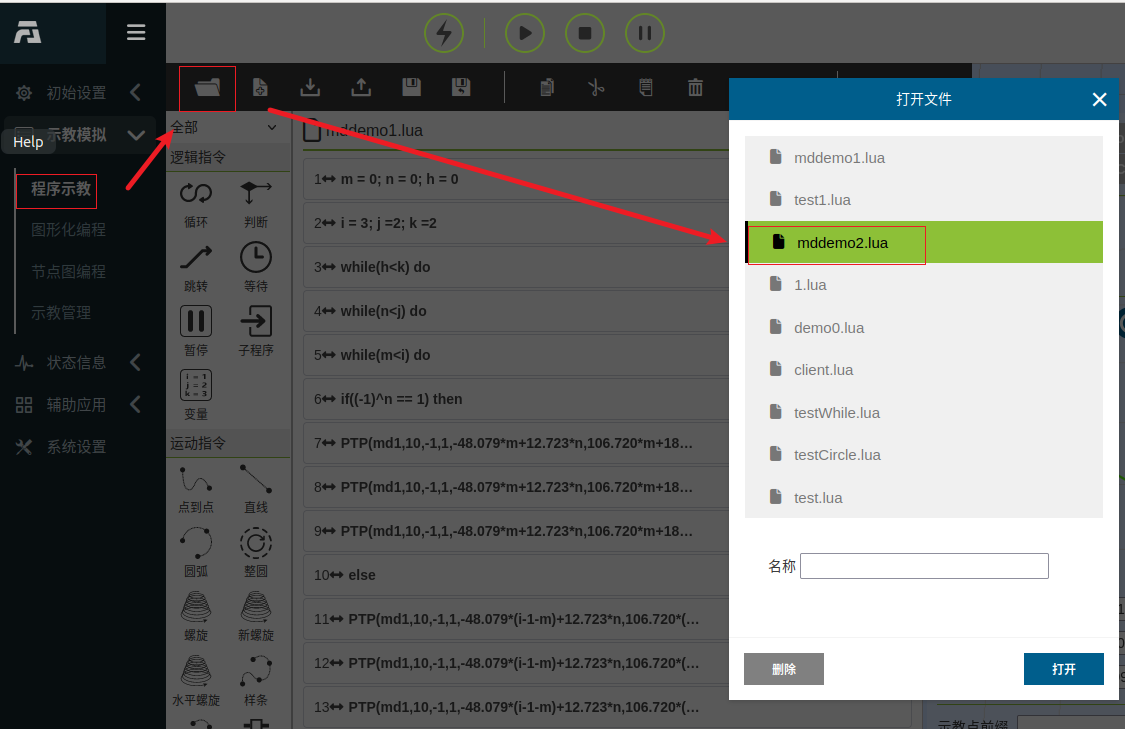
9 变量系统
lua变量声明
m = 0
n = “test”
变量查询(在面板可看)
RegisterVar(“number”,“m”)
RegisterVar(“string”,“n”)
系统变量
系统变量掉电保持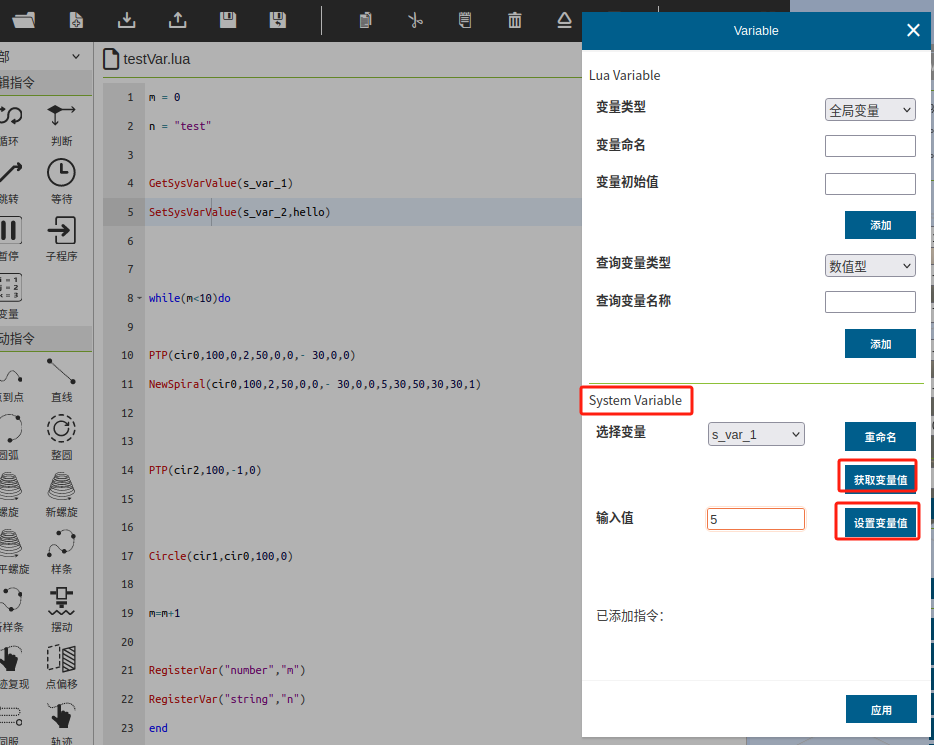
10 socket通信
10.1 作为客户端通信
SocketOpen(ip,port,“socket_0”) // 通道号(“socket_0”、“socket_1”、“socket_2”、“socket_3”)
SocketSendString(“hello,this is fa tcp!”,“socket_0”,0) // 是否阻塞(0:阻塞;非0:非阻塞,最大等待时长)
SocketReadString(“socket_0”,0)
SocketClose(“socket_0”)
n,svar = SocketReadAsciiFloat(1,“socket_0”,0) //n=1,表示成功返回,svar返回的值,1读取的数据数量
ip = "192.168.58.2"
port = 8888
tcp = 0
while 1 do
if tcp == 0 then
tcp = SocketOpen(ip,port,"socket_0")
elseif tcp == 1 then
SocketSendString("hello,this is fa tcp!","socket_0",0)
res = SocketReadString("socket_0",0)
if #res==0 then
SocketClose("socket_0")
else
RegisterVar("string","res")
end
end
WaitMs(1000)
end
10.2 作为服务端通信
SocketServerListen(port) //监听端口
clientID = SocketServerAccept() //接受连接
res = SocketServerSendString(“hello world”,clientID,0) //发送字符,通道号,阻塞否
SocketServerClose(clientID)
str = SocketServerReadString(clientID,0) //阻塞否
port = 8888
clientID = 0
SocketServerListen(port)
while 1 do
if clientID == 0 then
clientID = SocketServerAccept()
elseif type(clientID)=="number" then
if clientID>0 then
RegisterVar("number","clientID")
res = SocketServerSendString("hello world",clientID,0)
if res == 0 then -- 返回值为0表示发送失败
SocketServerClose(clientID)
clientID = 0
else --发送成功则接受返回值
str = SocketServerReadString(clientID,0)
if #str==0 then -- 返回值长度0,读取失败,关闭通道
SocketServerClose(clientID)
else
RegisterVar("string","str") --打印返回值
end
end
end
end
end
11 外部控制
外部控制主程序
外部控制回原点
12 Modubus tcp主站、从站
无效及报错
链接
13 常用设置
碰撞等级:当运动过程的力大于设定值时执行停止等策略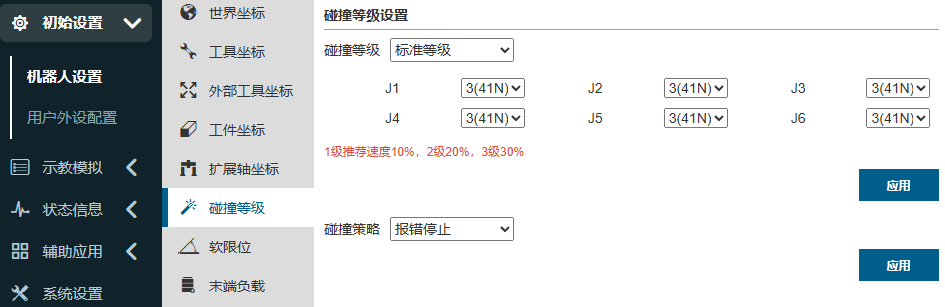
软限位:
末端负载:
摩擦力补偿:拖动模式下的摩擦阻力补偿
机器人安装方式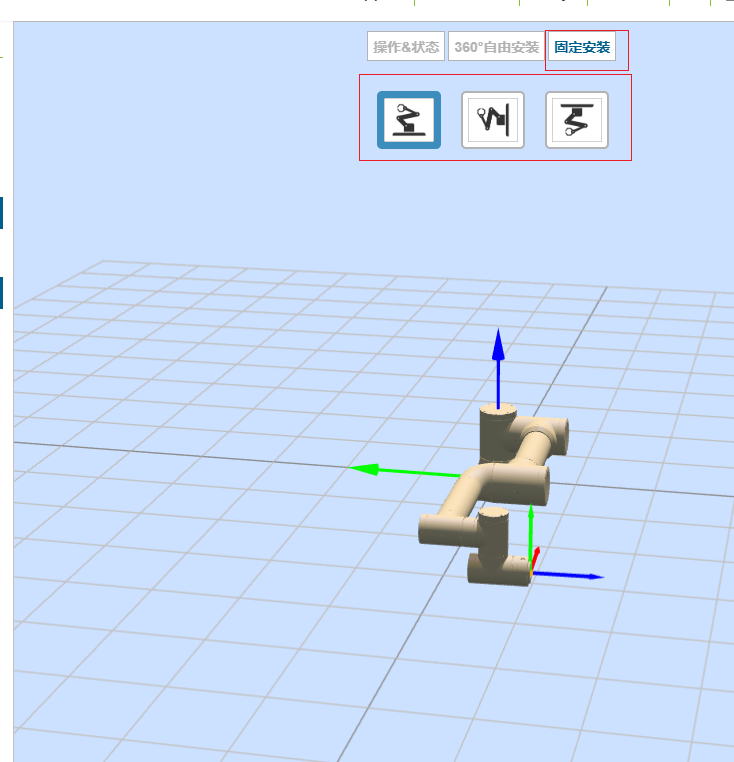
14 圆弧运动
首先PTP到 起点;
圆弧运动指定中间点和终点;
while 1 do
PTP(C1,100,-1,0)
ARC(C2,0,0,0,0,0,0,0,C3,0,0,0,0,0,0,0,100,-1)
end
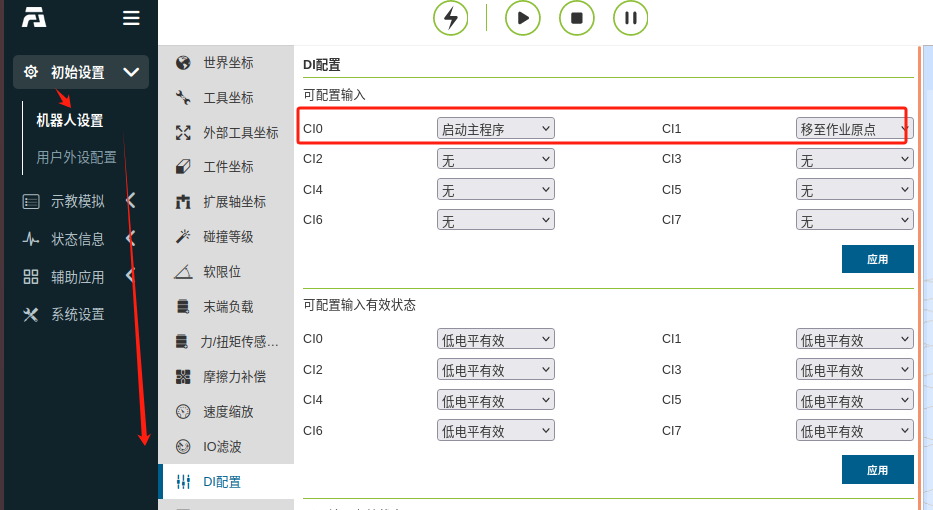
15 可配置输入 CI
启动:运行示教的程序
启动主程序:运行设置的主程序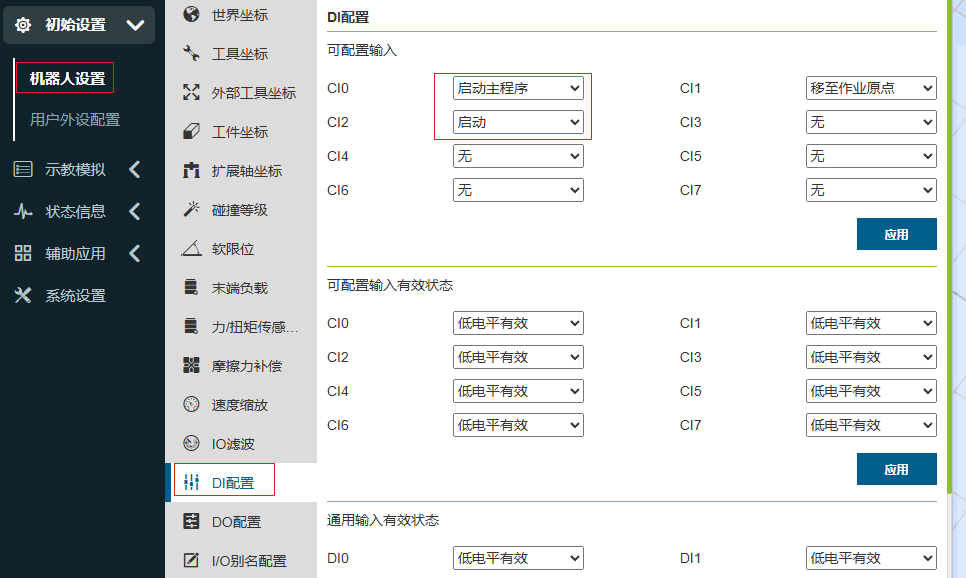
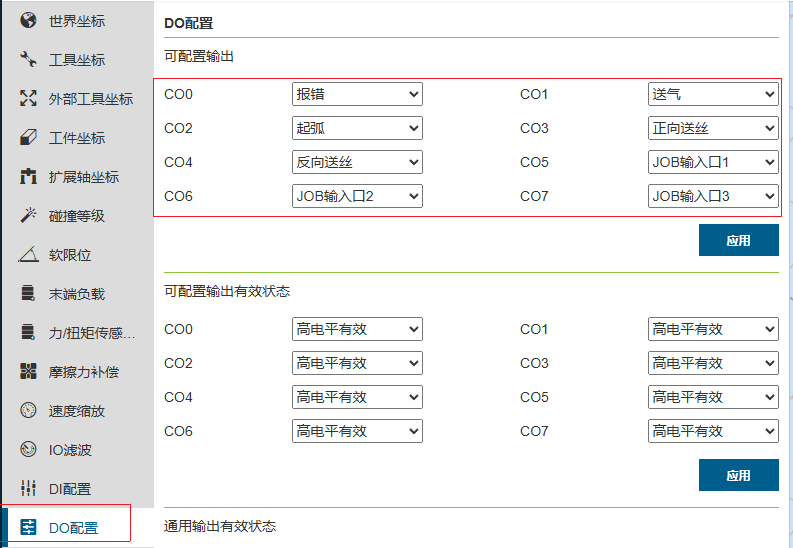
16 焊机功能
1 配置焊机与机器人通信的IO口及功能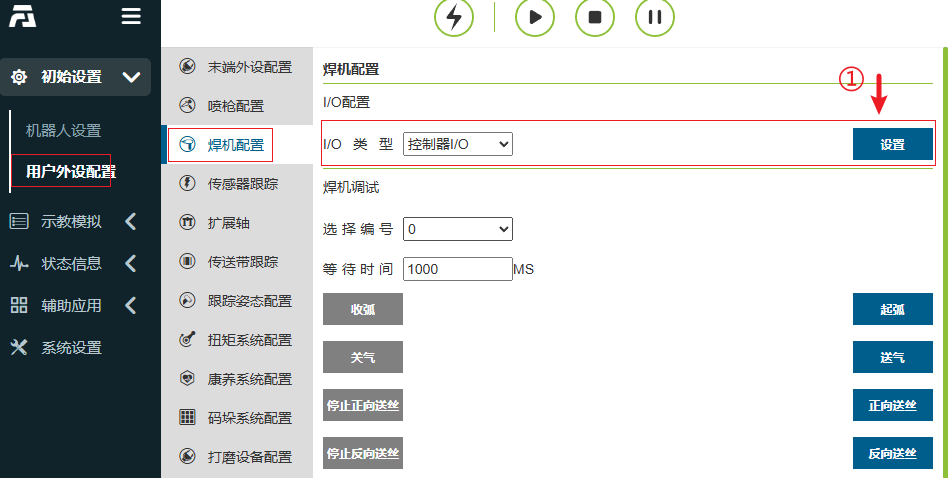
自动配置了IO功能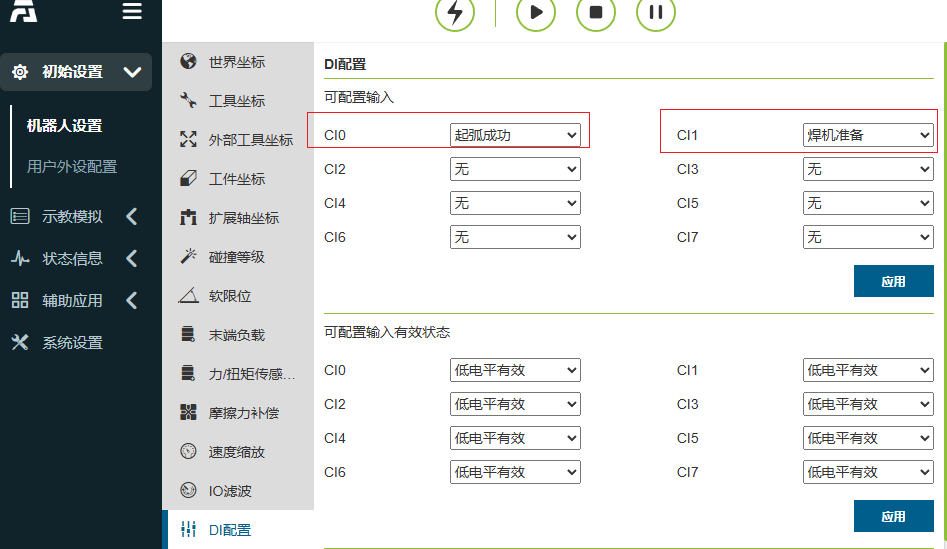
2 编写焊机示教程序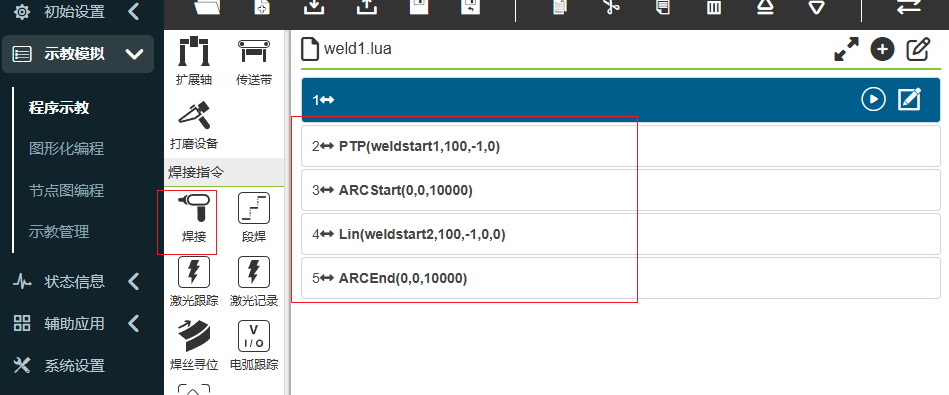
3 可以通过AO口输出焊机电流或电压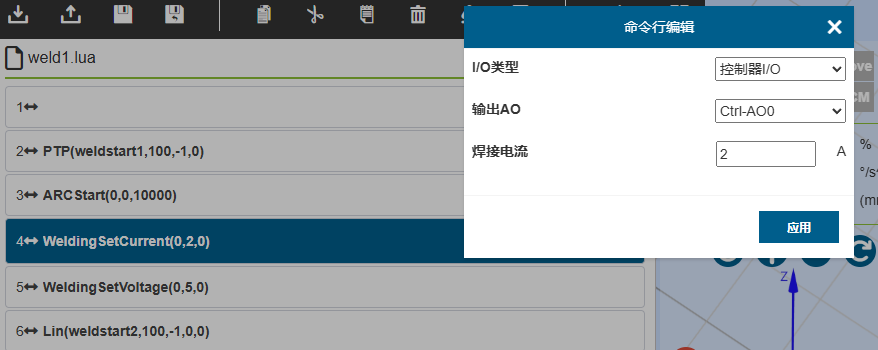
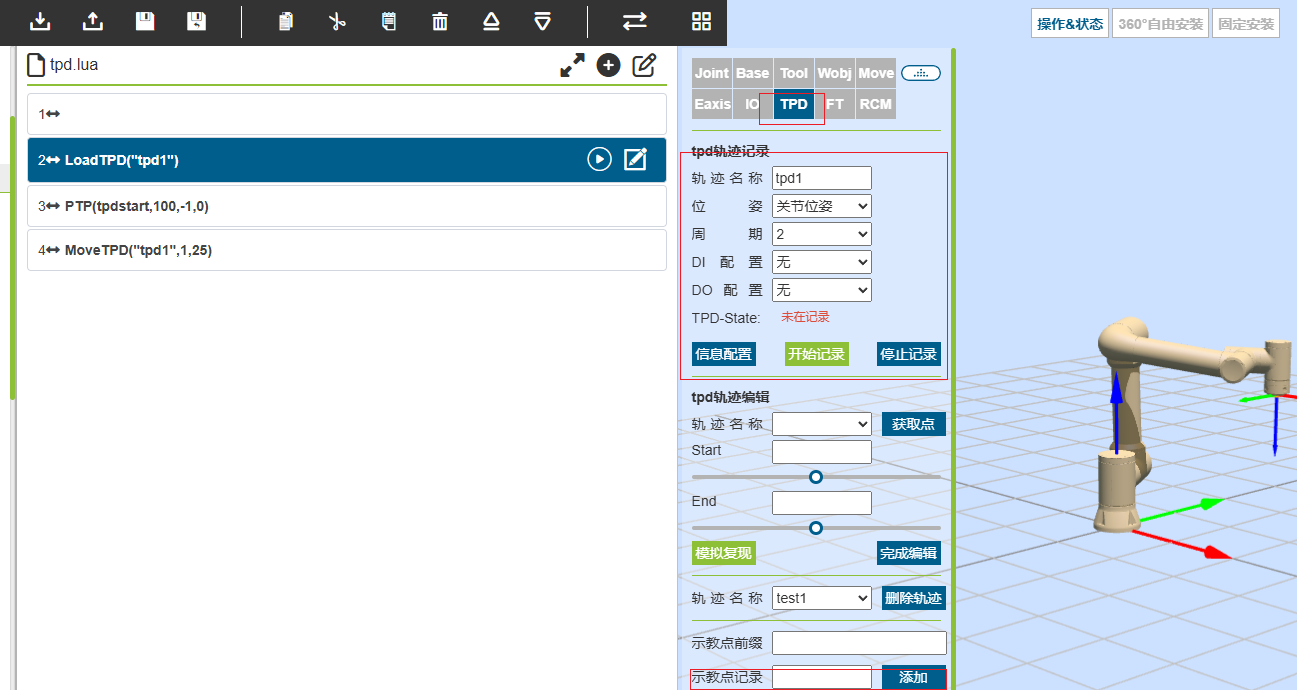
17 tpd轨迹复现
1、记录轨迹
2、代码轨迹复现
首先移动到轨迹起点,然后再复现轨迹
18 mode、pause、wait、call等指令
Mode(1):代码结尾机器人系统进入手动模式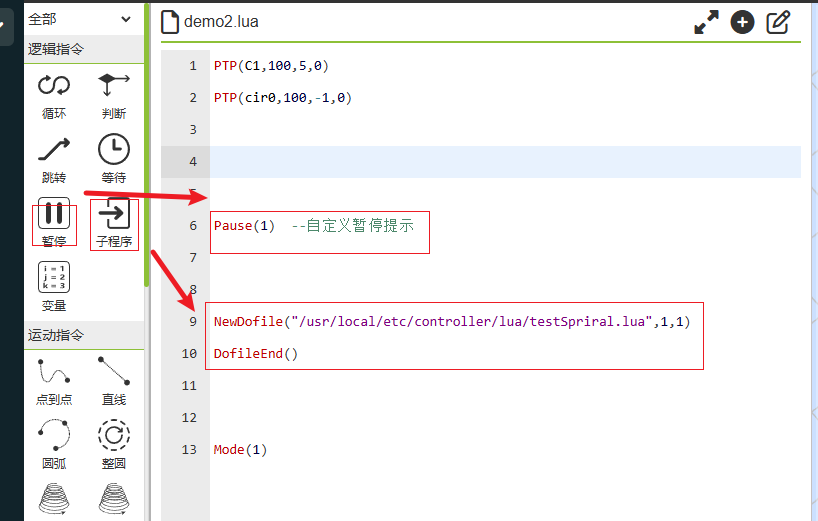
19 状态查询

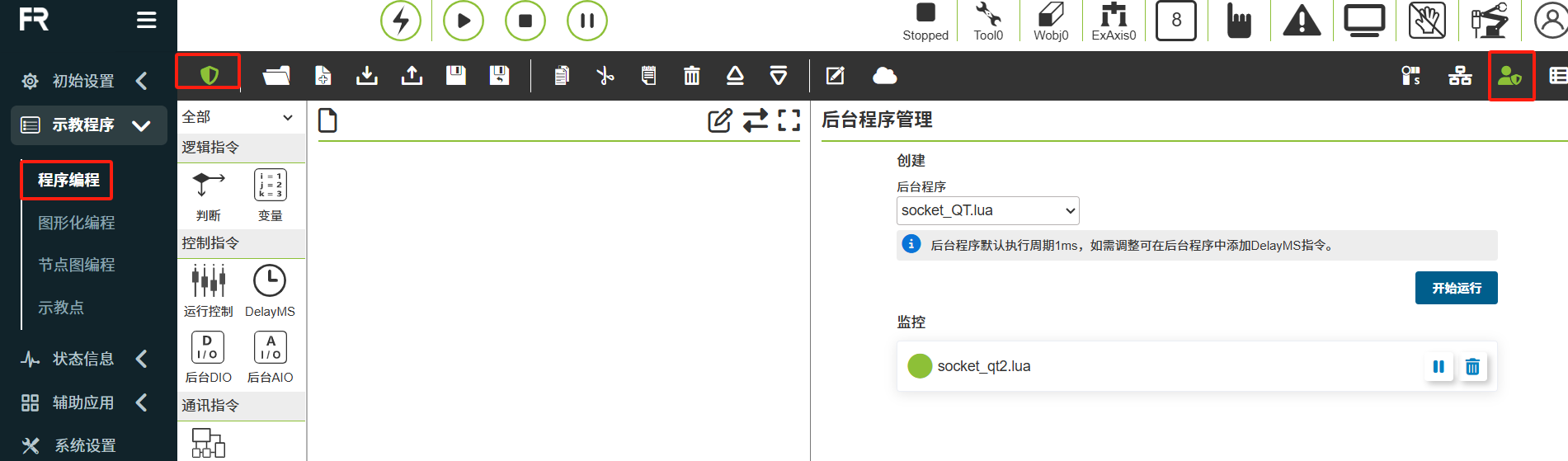
20 后台程序上电自动运行
21 获取机器人当前位置
xyz,rx,ry,rz
x,y,z,rx,ry,rz = GetActualToolFlangePose()
关节数据
j1,j2,j3,j4,j5,j6 = GetActualJointPosDegree()

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐

 21
21 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)